






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。当哲学课上老师问你什么是科学,什么是电的时候,不要觉得这些问题搞笑。哲学是科学之母,哲学就是追究终极问题,寻找那些不言自明只有小孩子会问的但是你却回答不出来的问题。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能让人胸中升起一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它居然给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
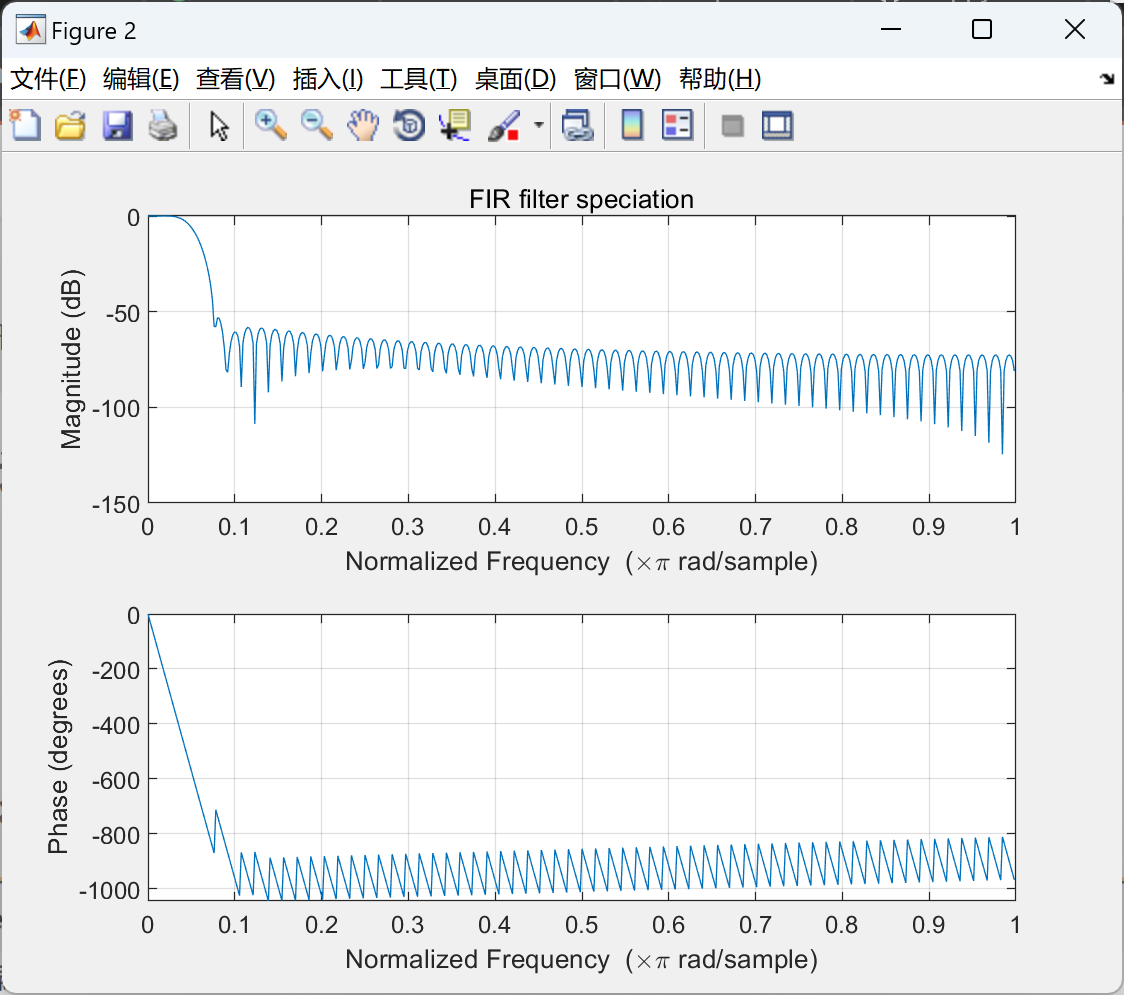
Chirp雷达(也称为调频连续波雷达)是一种使用调频信号来测量目标距离和速度的雷达系统。在Chirp雷达系统中,FIR滤波器(有限脉冲响应滤波器)可以被用来去除掉接收到的信号中的噪声和干扰,从而提高雷达系统的性能和准确性。
研究FIR滤波器在Chirp雷达系统中的应用可以包括以下几个方面:
1.信号处理:FIR滤波器可以用来处理接收到的雷达信号,提取出目标的特征信息,如距离和速度等。通过合适的滤波器设计和参数调整,可以实现对信号的有效处理和提取。
2.噪声抑制:Chirp雷达系统在接收到信号时常常伴随着各种噪声和干扰。通过设计合适的FIR滤波器,可以去除或减少这些噪声,提高雷达系统的性能和准确性。
3.信号重构:在Chirp雷达系统中,由于信号传输和接收过程中可能存在一定的损耗和失真,使用FIR滤波器可以对接收到的信号进行重建和修复,使得信号更加准确和可靠。
总之,研究FIR滤波器在Chirp雷达系统中的应用可以帮助提高雷达系统的性能和准确性,使得系统在目标检测和跟踪方面表现更出色。
📚2 运行结果
部分代码:
% parameter
N = 4096;
f0 = 60e+6; % 60MHz中频
B = 8e+6; % 8MHz带宽
Tp = 10e-6; %10us时宽
fs = 80e+6; % 80MHz采样频率
fnco = 20e+6; % 20MHz NCO频率
t = (0:N-1)/fs;
fd = (-N/2:N/2-1)*fs/N;
kr = B/Tp;
% Generate LFM @f0
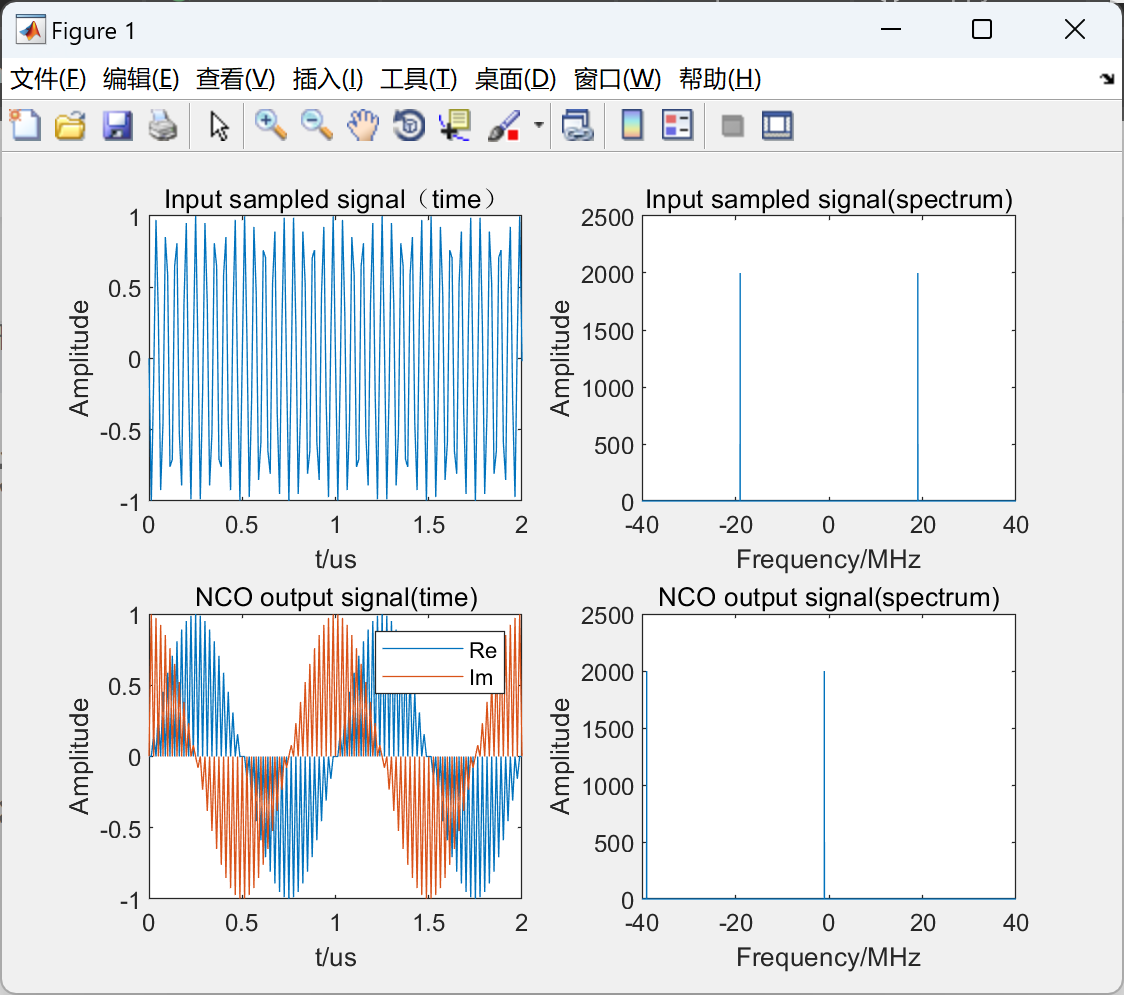
s_in = rectpuls(t-Tp/2,Tp).*exp(1i*pi*kr*(t-Tp/2).^2).*exp(-1i*2*pi*f0*t);
s_in_fft = fft(s_in,N);
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]潘琳,王辉,糜江,等.基于调频连续波雷达交通结构物微形变高精度频率估计[J].公路交通科技:应用技术版, 2018(11):4.DOI:CNKI:SUN:GLJJ.0.2018-11-082.
[2]王春艳,黄仁欣,宗成阁,等.基于Chirp-Z变换的LFMCW系统测距算法仿真研究[J].微计算机信息, 2005, 021(12X):188-189.DOI:10.3969/j.issn.1008-0570.2005.36.067.
















 3907
3907











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











