






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
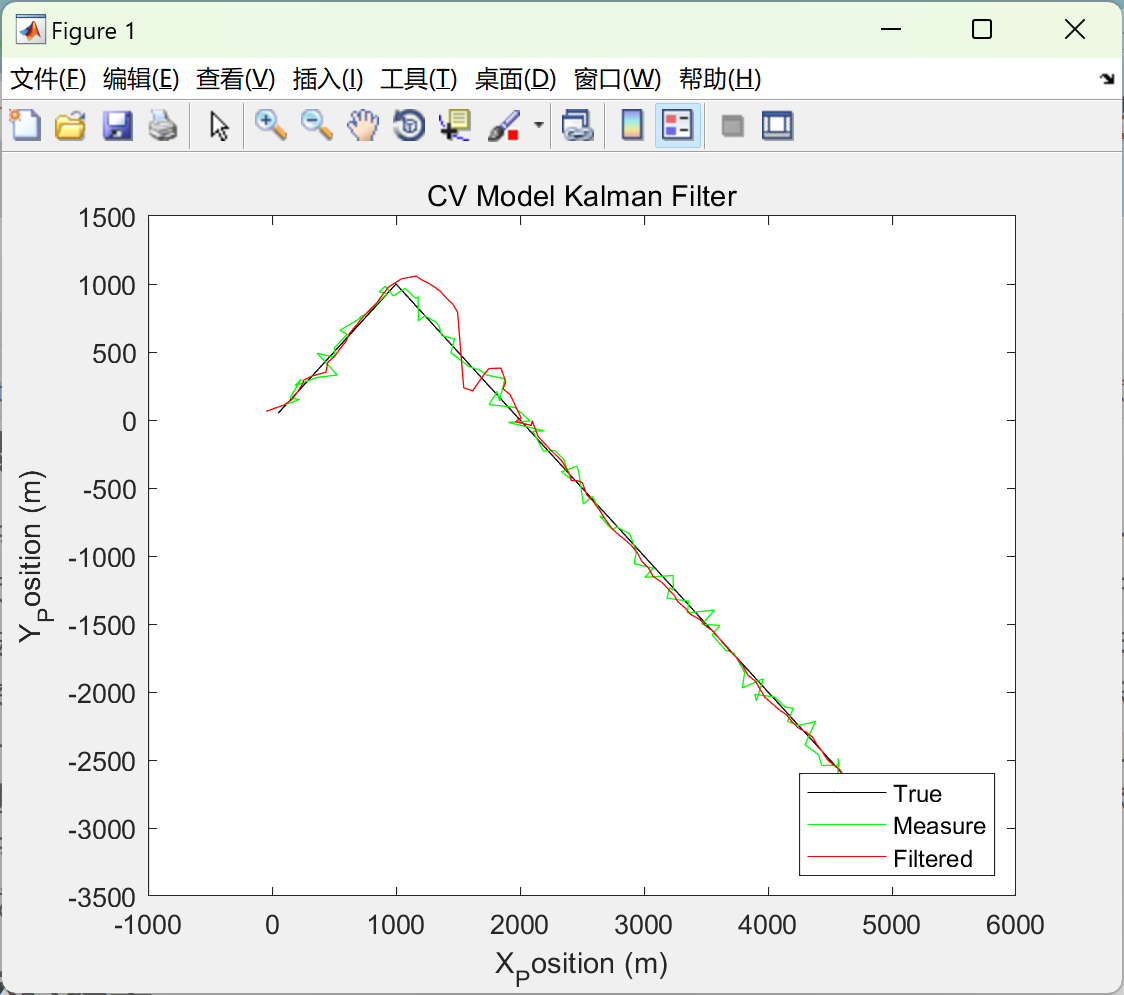
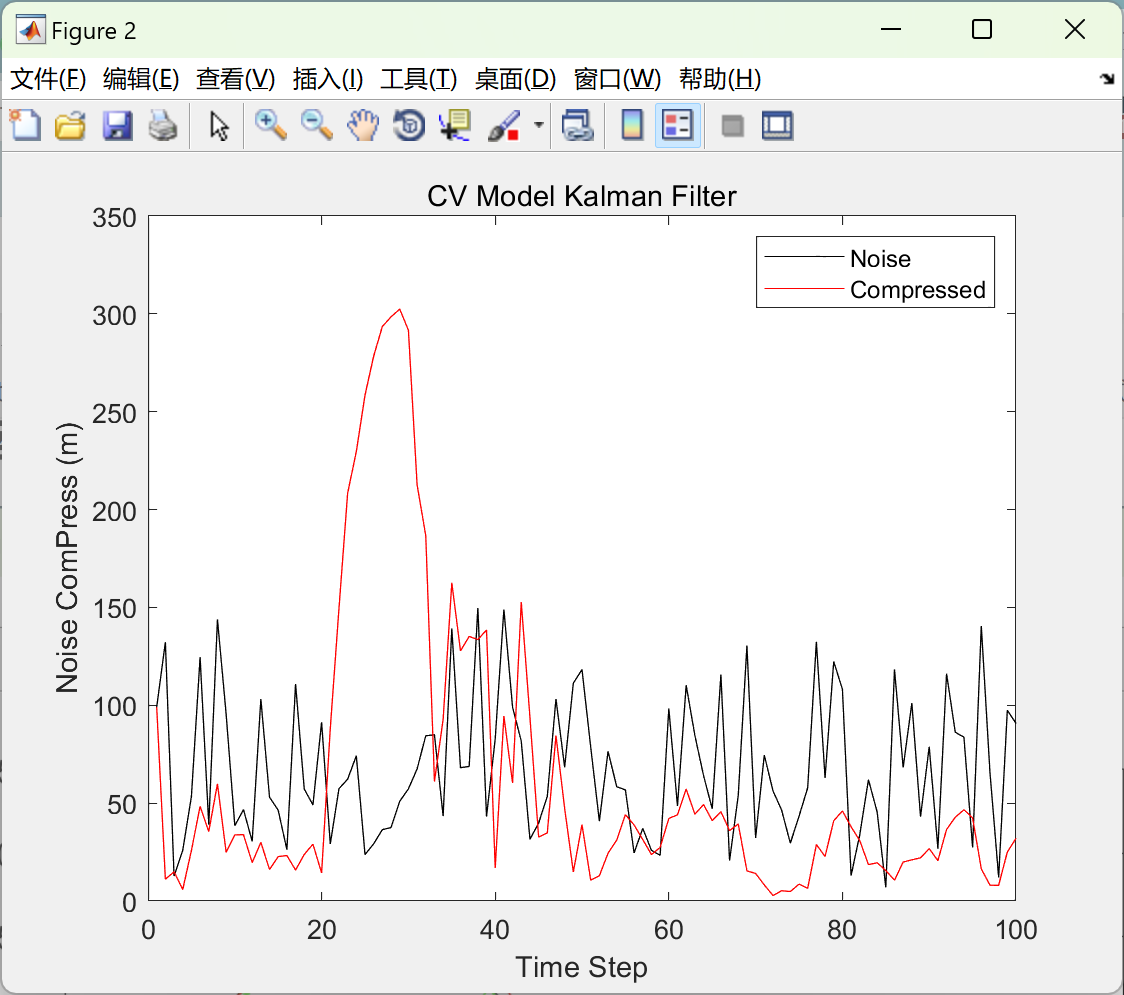
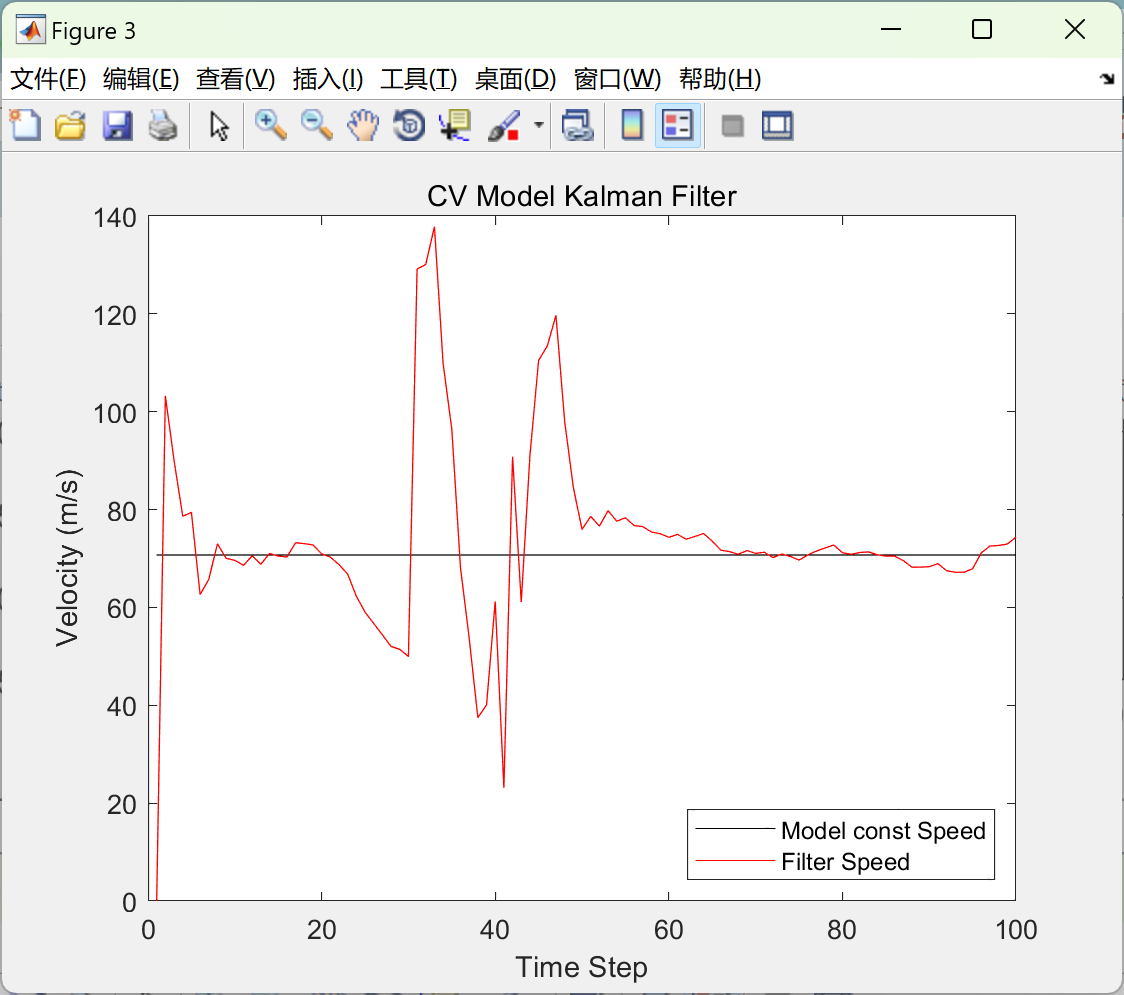
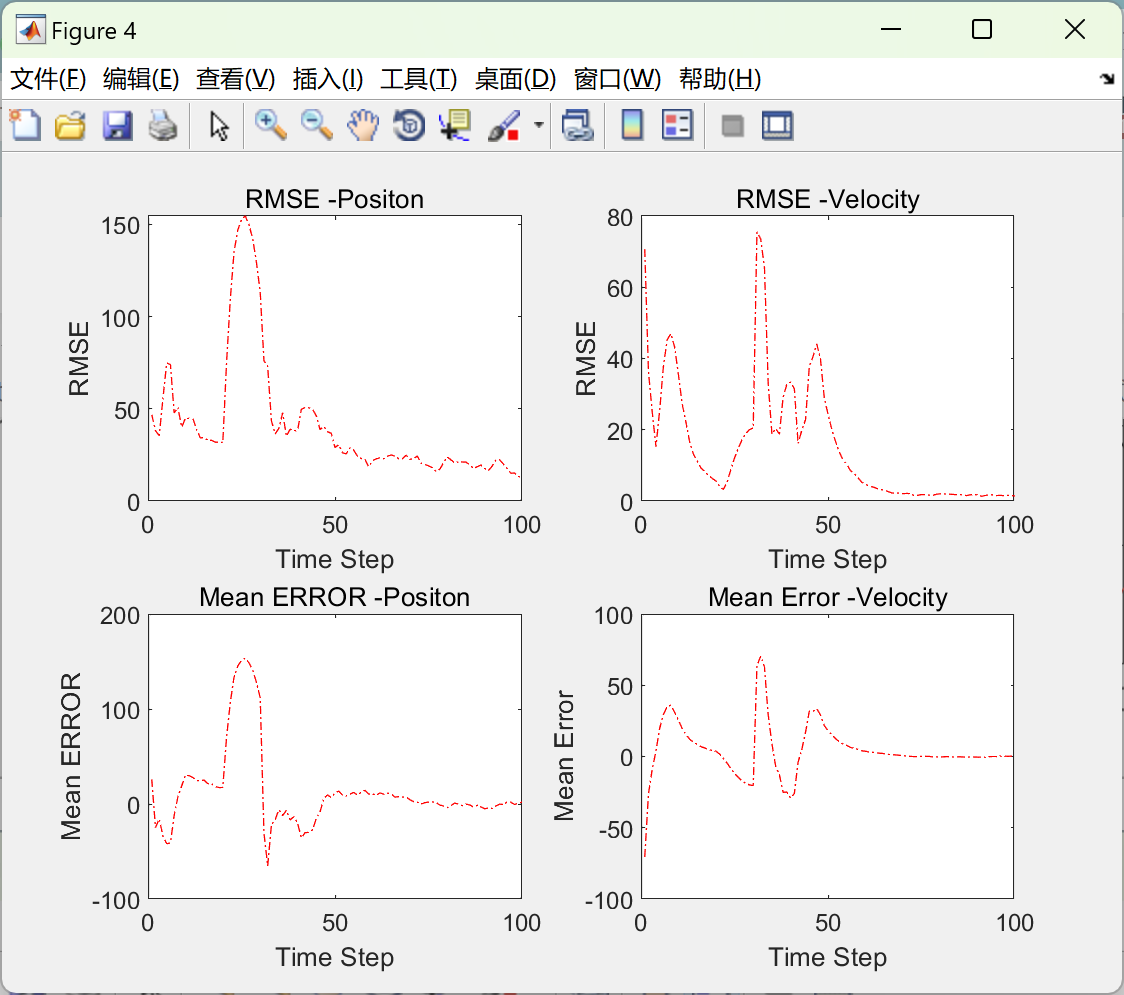
二维目标跟踪是指在平面上跟踪目标的位置和速度变化。这通常应用于目标追踪、运动分析、车辆跟踪等领域。目标的运动可以通过传感器(如雷达、摄像头)获取的位置和速度信息进行估计。卡尔曼滤波器是一种递归状态估计技术,用于估计动态系统的状态。在二维目标跟踪中,卡尔曼滤波器被用来估计目标的位置和速度,同时考虑测量误差和系统噪声。在卡尔曼滤波中,目标状态通常表示为一个包含位置和速度的状态向量。系统动态由状态转移矩阵描述,测量模型由观测矩阵描述。通过状态转移方程和观测方程,可以对目标的位置和速度进行预测和更新。基于卡尔曼滤波的二维目标跟踪通过利用传感器数据进行状态估计,实现了对目标位置和速度的准确跟踪,可应用于多种领域的实时目标跟踪任务中。
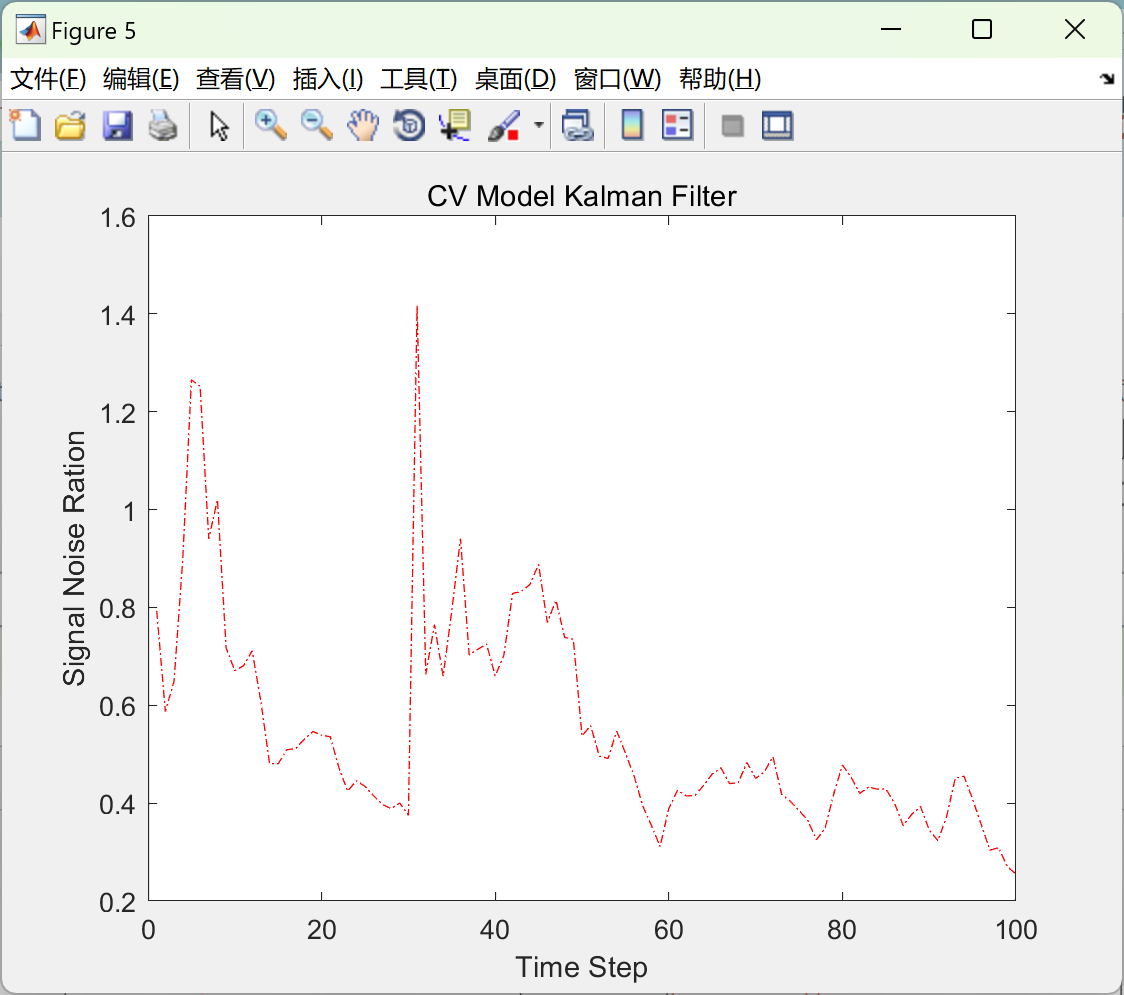
📚2 运行结果
 主函数部分代码:
主函数部分代码:
% 跟踪直角转弯的二维匀速直线运动目标
%带比较
%Test the standard kalman Filter use CV Model
clear all
close all
T = 1; %sample period
FCV = [1 T 0 0; 0 1 0 0;0 0 1 T;0 0 0 1];
BCV = [T^2/2 0; T 0; 0 T^2/2; 0 T];
QCV = 1; %Model noise covariance
%Run Time
RunTime = 100;
%MontoCarlo Times
MonteCarloTimes = 30;
%True Target Measurement
Z_Init = [0 0]';
V_CV = [50 50]';
V_CV2 = [50 -50]';%直角转弯
A_CV = [0 0]';
for i = 1 : 20
Z_Real(1, i) = Z_Init(1,1) + V_CV(1,1) * (T * i);
Z_Real(2, i) = V_CV(1,1);
Z_Real(3, i) = A_CV(1,1);
Z_Real(4, i) = Z_Init(2,1) + V_CV(2,1) * (T * i);
Z_Real(5, i) = V_CV(2,1);
Z_Real(6, i) = A_CV(2,1);
end
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]梁津鑫,崔颢,张公平.强跟踪容积卡尔曼滤波在空空导弹制导中的应用[J/OL].航空兵器:1-7[2024-04-29].http://kns.cnki.net/kcms/detail/41.1228.TJ.20240206.0838.001.html.
[2]武星,汤凯,李兴达,等.多视角雷达点云融合的移动机器人集群跟踪[J].仪器仪表学报,2023,44(12):175-186.DOI:10.19650/j.cnki.cjsi.J2311934.

















 1718
1718

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











