






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
一、背景与意义: 随着无人机技术的迅速发展,其在各个领域的应用不断拓展,如航拍、物流配送、农业植保、环境监测等。然而,在复杂的飞行环境中,无人机面临着各种障碍物,如建筑物、树木、电线杆等,这使得自主避障成为无人机安全飞行的关键需求。无人机自主避障系统的开发旨在提高无人机的飞行安全性和可靠性,扩大其应用范围。
二、工作原理: 1. 环境感知:传感器不断扫描无人机周围的环境,获取障碍物的信息。 2. 数据处理:对传感器数据进行处理和分析,识别障碍物并确定其位置和运动状态。 3. 避障决策:根据障碍物信息和当前飞行状态,选择合适的避障策略。 4. 飞行控制:将避障决策转化为飞行控制指令,调整无人机的飞行姿态和轨迹,实现自主避障。
三、应用领域1. 航拍与影视制作:确保无人机在拍摄过程中的安全,获取更稳定、高质量的画面。 2. 物流配送:使无人机能够在城市中安全地进行货物配送,提高配送效率。 3. 农业植保:避免无人机与农作物、电线杆等障碍物碰撞,提高植保作业的准确性和安全性。 4. 环境监测:在复杂的自然环境中进行监测任务,如森林火灾监测、水质监测等。 5. 抢险救灾:快速进入危险区域进行侦察和救援,为救援行动提供支持。 总之,无人机自主避障系统是无人机技术发展的重要方向之一,它将为无人机的安全飞行和广泛应用提供有力保障。
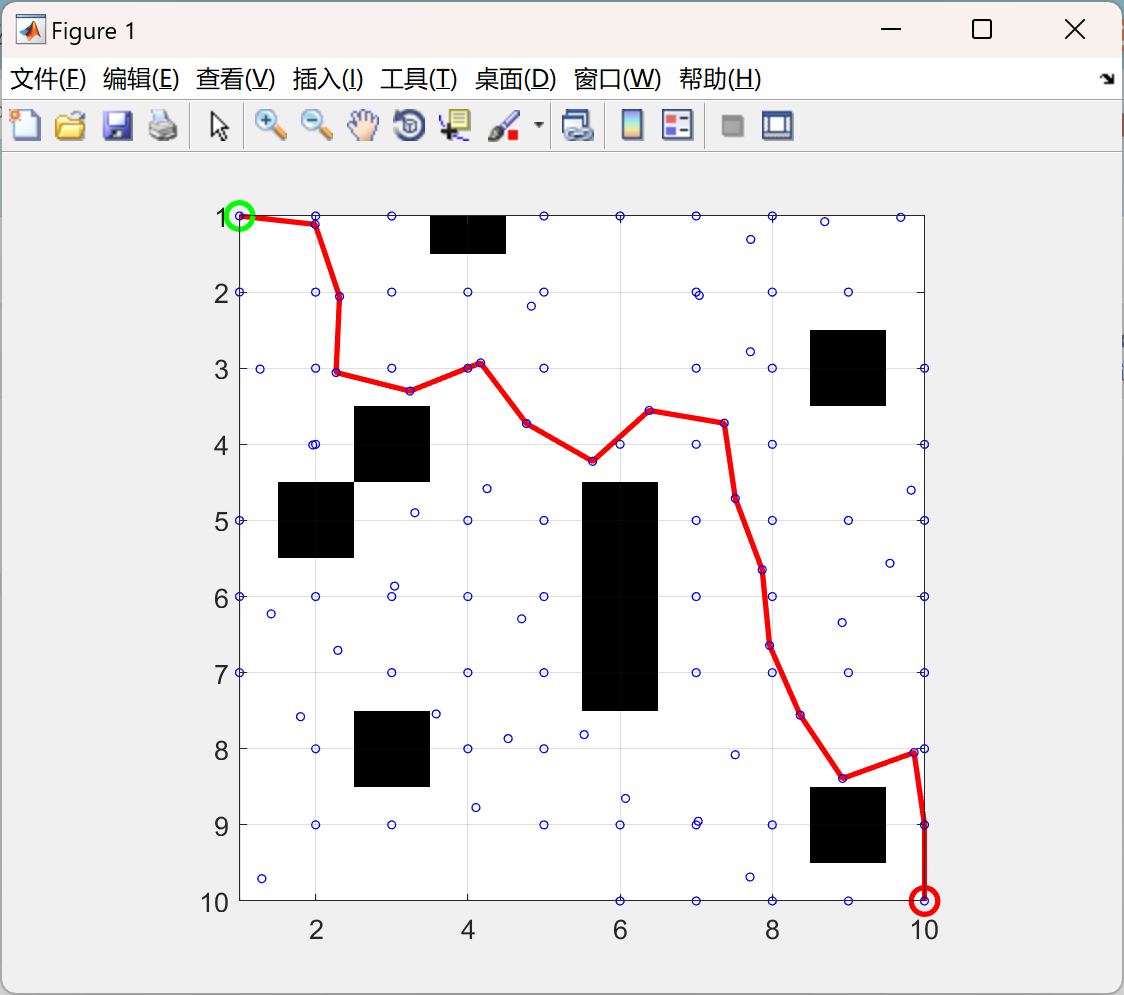
📚2 运行结果
主函数部分代码:
% Define the map
map = [
0, 0, 0, 1, 0, 0, 0, 0, 0, 0;
0, 0, 0, 0, 0, 0, 0, 0, 0, 0;
0, 0, 0, 0, 0, 0, 0, 0, 1, 0;
0, 0, 1, 0, 0, 0, 0, 0, 0, 0;
0, 1, 0, 0, 0, 1, 0, 0, 0, 0;
0, 0, 0, 0, 0, 1, 0, 0, 0, 0;
0, 0, 0, 0, 0, 1, 0, 0, 0, 0;
0, 0, 1, 0, 0, 0, 0, 0, 0, 0;
0, 0, 0, 0, 0, 0, 0, 0, 1, 0;
0, 0, 0, 0, 0, 0, 0, 0, 0, 0
];
% Define start and goal positions
start = [1, 1];
goal = [10, 10];
% Define RRT parameters
max_iter = 1000; % Maximum number of iterations
step_size = 1.0; % Step size for extending the tree
% Run RRT algorithm
[path, tree] = rrt(map, start, goal, max_iter, step_size);
% Plot the path and tree
plot_rrt(map, path, tree);
function [path, tree] = rrt(map, start, goal, max_iter, step_size)
% Initialize the tree with the start node
tree = [start, 0]; % Each node contains x, y, and parent index
for iter = 1:max_iter
% Sample a random point in the map
random_point = [randi(size(map, 1)), randi(size(map, 2))];
% Find the nearest node in the tree to the random point
nearest_node_idx = nearest_neighbor(tree(:, 1:2), random_point);
nearest_node = tree(nearest_node_idx, :);
% Extend the tree towards the random point
new_node = steer(nearest_node(1:2), random_point, step_size);
% If the new node is not in collision with obstacles
if ~check_collision(map, nearest_node(1:2), new_node)
% Add the new node to the tree
tree = [tree; new_node, nearest_node_idx];
% Check if the goal is reached
if norm(new_node - goal) < step_size
path = reconstruct_path(tree, size(tree, 1));
return;
end
end
end
% If the goal is not reached within the maximum iterations
disp('Goal not reached within maximum iterations');
path = [];
end
function nearest_node_idx = nearest_neighbor(tree, random_point)
% Find the index of the nearest node in the tree to the random point
distances = vecnorm(tree - random_point, 2, 2);
[~, nearest_node_idx] = min(distances);
end
function new_node = steer(nearest_node, random_point, step_size)
% Move from the nearest node towards the random point by step_size
direction = random_point - nearest_node;
distance = norm(direction);
if distance <= step_size
new_node = random_point;
else
new_node = nearest_node + (direction / distance) * step_size;
end
end
function in_collision = check_collision(map, nearest_node, new_node)
% Check if the line segment between nearest_node and new_node intersects with obstacles
x1 = nearest_node(1);
y1 = nearest_node(2);
x2 = new_node(1);
y2 = new_node(2);
in_collision = any(map(round(linspace(x1, x2, 100)), round(linspace(y1, y2, 100))));
end
function path = reconstruct_path(tree, goal_idx)
% Reconstruct the path from the goal node to the start node
path = tree(goal_idx, 1:2);
parent_idx = tree(goal_idx, 3);
while parent_idx ~= 0
path = [tree(parent_idx, 1:2); path];
parent_idx = tree(parent_idx, 3);
end
end
function plot_rrt(map, path, tree)
% Plot map
imagesc(map);
colormap(flipud(gray));
hold on;
% Plot path
if ~isempty(path)
plot(path(:, 2), path(:, 1), 'r', 'LineWidth', 2);
end
% Plot tree
plot(tree(:, 2), tree(:, 1), 'bo', 'MarkerSize', 3);
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]陈子昂. 竹林场景下无人机避障系统的研究[D].浙江农林大学,2024.DOI:10.27756/d.cnki.gzjlx.2024.000137.
[2]徐健,戴芬良.基于人工智能技术的无人机避障系统研究[J].软件,2023,44(10):149-151.
🌈4 Matlab代码





















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











