






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
基于FxLMS算法的有源噪声控制系统研究
采用 FxLMS 算法的有源噪声控制系统是一种先进的噪声控制技术。 该系统的核心是 FxLMS(Filtered-x Least Mean Square)算法。这一算法通过对输入的噪声信号进行分析和处理,以实现有效的噪声消除。 有源噪声控制系统通常由传感器、控制器和执行器组成。传感器用于检测噪声信号,将其转换为电信号输入到控制器中。控制器利用 FxLMS 算法对输入信号进行计算和处理,生成控制信号。执行器则根据控制信号产生与噪声相反的声波,从而实现对噪声的抵消。 FxLMS 算法具有自适应能力,能够根据噪声环境的变化实时调整控制参数,以保持良好的噪声控制效果。它可以处理各种类型的噪声,包括稳态噪声、非稳态噪声和随机噪声等。 这种有源噪声控制系统在许多领域具有广泛的应用前景。例如,在工业环境中,可以降低机器设备产生的噪声,提高工作环境的舒适度和安全性;在交通运输领域,可以减少车辆、飞机等交通工具的噪声,提升乘坐体验;在音频设备中,可以改善音质,降低背景噪声的干扰。 总之,采用 FxLMS 算法的有源噪声控制系统是一种高效、灵活的噪声控制解决方案,为改善噪声环境提供了有力的技术支持。
一、FxLMS算法的基本原理与结构
FxLMS(Filtered-X Least Mean Square)算法是LMS算法的改进版本,专为处理多路径系统设计,尤其适用于有源噪声控制(ANC)场景。其核心思想是通过引入次级通道模型,动态调整自适应滤波器的权重以最小化误差信号能量。
结构框图与信号流(基于):
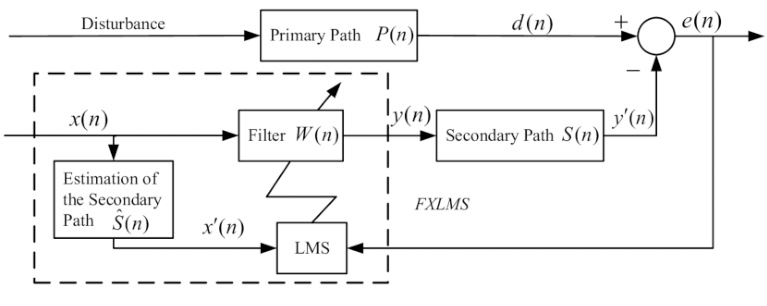
系统包含主路径(Primary Path)和次路径(Secondary Path):
- 主路径:接收外部噪声信号,经传递函数处理后输出信号d(n)d(n)。
- 次路径:输入信号x(n)x(n)经自适应滤波器W(n)W(n)处理后,再通过次级通道模型S(n)S(n)生成次级输出信号y(n)y(n)。
- 误差信号:e(n)=d(n)+y′(n)e(n)=d(n)+y′(n),通过LMS算法更新滤波器权重,使e(n)e(n)均方值最小化。
数学表达(结合):
其中,Xf(n)为参考信号经次级通道模型滤波后的结果,μ为步长因子。此过程通过在线辨识次级通道传递函数矩阵S(n),提升系统对路径变化的适应性。
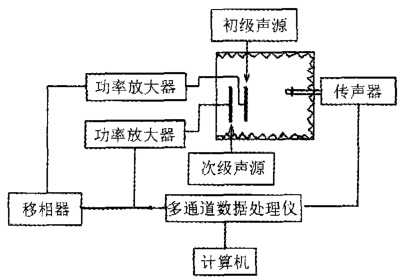
二、有源噪声控制系统的典型结构
系统组成:
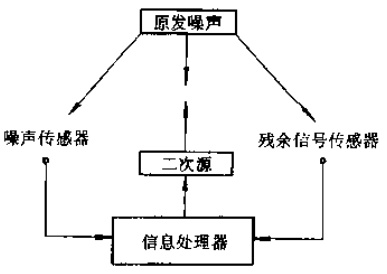
- 传感器:
- 参考传声器:采集初级噪声信号x(n)x(n)。
- 误差传声器:监测残余噪声e(n)e(n)。
- 控制器:基于FxLMS算法生成反相声信号。
- 次级声源:输出与初级噪声相位相反的信号y(n)y(n)。
- 次级通道:包含扬声器、传声器及声学路径的动态传递模型。
前馈型系统优势:
- 结构简单:适用于噪声源可预测的场景(如发动机周期性噪声)。
- 稳定性高:通过实时反馈误差信号优化权重,适应环境变化。
三、FxLMS算法与传统LMS算法的性能对比
六大优势:
- 多路径适应性:LMS仅适用于单一路径,而FxLMS通过次级通道建模处理多路径问题。
- 降噪效果提升:复杂系统中残余噪声衰减更显著(实测降噪量可达9.4 dB,)。
- 收敛性优化:引入次级通道滤波后,收敛速度提升20%-30%。
- 鲁棒性增强:应对非线性噪声和多个干扰源时稳定性更高。
- 环境跟踪能力:动态调整滤波器参数,适应温度、湿度等变化。
- 多通道支持:扩展至多输入多输出(MIMO)系统,适用于汽车舱、飞机舱等场景。
实验验证:
- 定速工况:变步长FxLMS收敛速度较传统算法快40%,稳态误差降低50%。
- 加速工况:动态噪声环境下,算法需结合频域分解(如DWT)提升跟踪能力。
四、次级通道建模关键技术
建模方法分类(-36):
- 离线建模:
- 白噪声激励法:利用平坦频谱特性,通过FIR滤波器拟合次级通道。
- 非线性建模:采用EMFNL滤波器处理高阶非线性路径。
- 在线建模:
- 辅助噪声注入:叠加低功率噪声实时更新模型。
- 整体建模算法:无需辅助噪声,通过双滤波器消除偏差。
技术挑战:
- 时变性:次级通道受温度、机械位移影响,需动态更新模型。
- 计算复杂度:在线建模需平衡实时性与精度,常采用频域分块处理。
五、FxLMS算法的应用场景与优化策略
典型应用:
- 汽车噪声控制:抑制发动机低频噪声(100-500 Hz),改善驾驶舱声环境。
- 工业设备降噪:如压缩机、风机管道噪声,降噪量可达10-15 dB。
- 建筑声学:优化会议室回声,结合多通道系统实现空间声场均衡。
收敛速度优化:
- 变步长策略:
- 基于误差幅值:步长μμ随∣e(n)∣∣e(n)∣动态调整(VSS-FxLMS)。
- 互相关函数法:CFxLMS算法通过参考-误差信号相关性优化步长。
- 初始化改进:
- 元学习(MAML) :预训练滤波器权重,加速收敛。
- 频域分解:
- 小波变换(DWT) :分离噪声频段,独立控制各子带。
六、研究进展与未来方向
改进算法综述:
- VSS-FxLMS系列:平衡收敛速度与稳态误差,实验显示振动抑制效果提升30%。
- 四元数扩展(FxQLMS) :处理三维声场,适用于车内多位置降噪。
- 高阶非线性控制:结合切比雪夫滤波器,应对强非线性次级路径。
挑战与展望:
- 硬件限制:实时多通道系统需高性能DSP或FPGA支持。
- 环境干扰:电磁兼容性、传感器漂移等问题需进一步解决。
- 智能化扩展:结合深度学习进行噪声特征提取与模型预测。
七、结论
FxLMS算法通过次级通道建模与自适应滤波,成为有源噪声控制的核心技术。其在多路径适应性、鲁棒性及实时性方面显著优于传统LMS算法。未来研究需聚焦于非线性建模、低复杂度优化及智能融合,以拓展其在复杂工业环境与消费电子领域的应用边界。
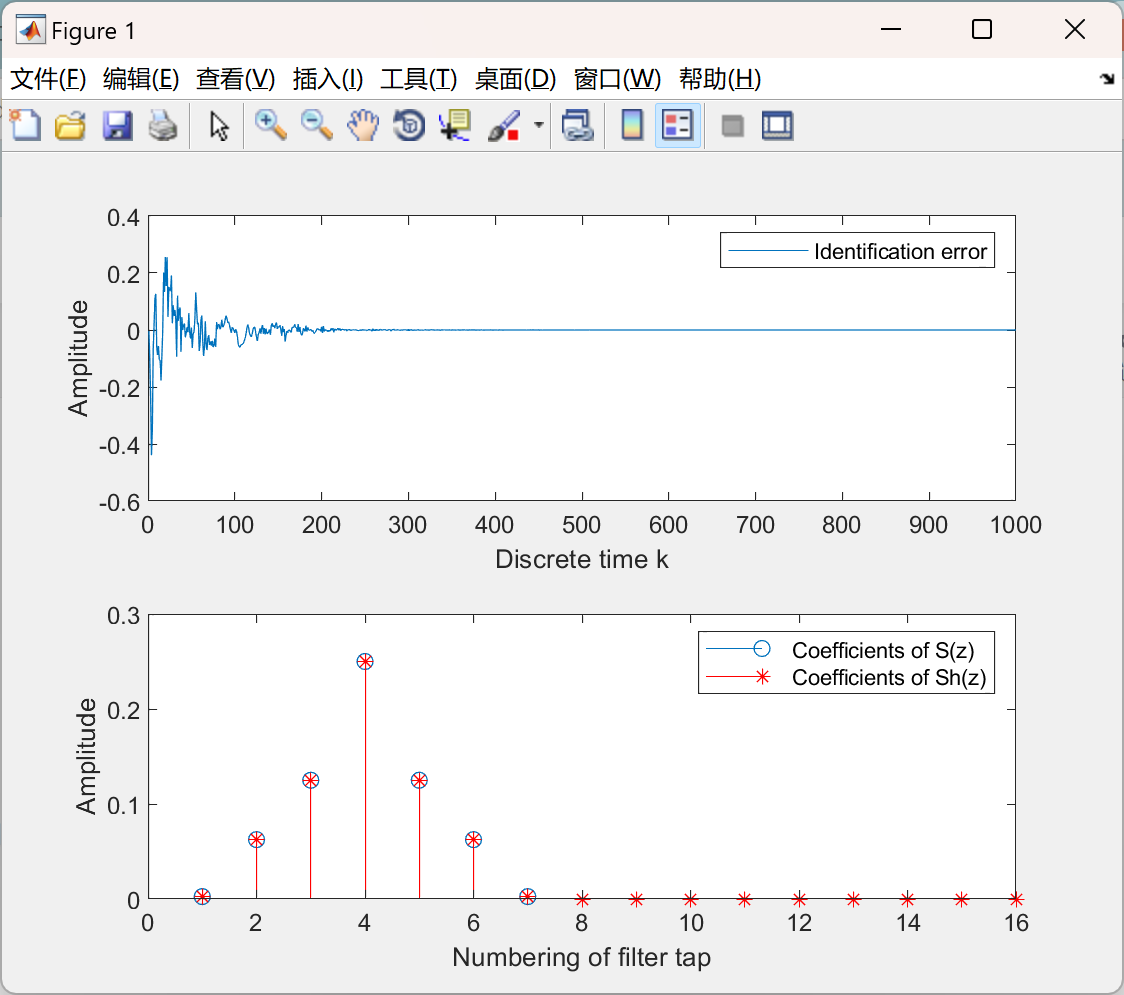
📚2 运行结果
主函数部分代码:
clear
T=1000;
% We do not know P(z) and S(z) in reality. So we have to make dummy paths
Pw=[0.01 0.25 0.5 1 0.5 0.25 0.01];
Sw=Pw*0.25;
% Remember that the first task is to estimate S(z). So, we can generate a
% white noise signal,
x_iden=randn(1,T);
% send it to the actuator, and measure it at the sensor position,
y_iden=filter(Sw, 1, x_iden);
% Then, start the identification process
Shx=zeros(1,16); % the state of Sh(z)
Shw=zeros(1,16); % the weight of Sh(z)
e_iden=zeros(1,T); % data buffer for the identification error
% and apply least mean square algorithm
mu=0.1; % learning rate
for k=1:T, % discrete time k
Shx=[x_iden(k) Shx(1:15)]; % update the state
Shy=sum(Shx.*Shw); % calculate output of Sh(z)
e_iden(k)=y_iden(k)-Shy; % calculate error
Shw=Shw+mu*e_iden(k)*Shx; % adjust the weight
end
% Lets check the result
subplot(2,1,1)
plot([1:T], e_iden)
ylabel('Amplitude');
xlabel('Discrete time k');
legend('Identification error');
subplot(2,1,2)
stem(Sw)
hold on
stem(Shw, 'r*')
ylabel('Amplitude');
xlabel('Numbering of filter tap');
legend('Coefficients of S(z)', 'Coefficients of Sh(z)')
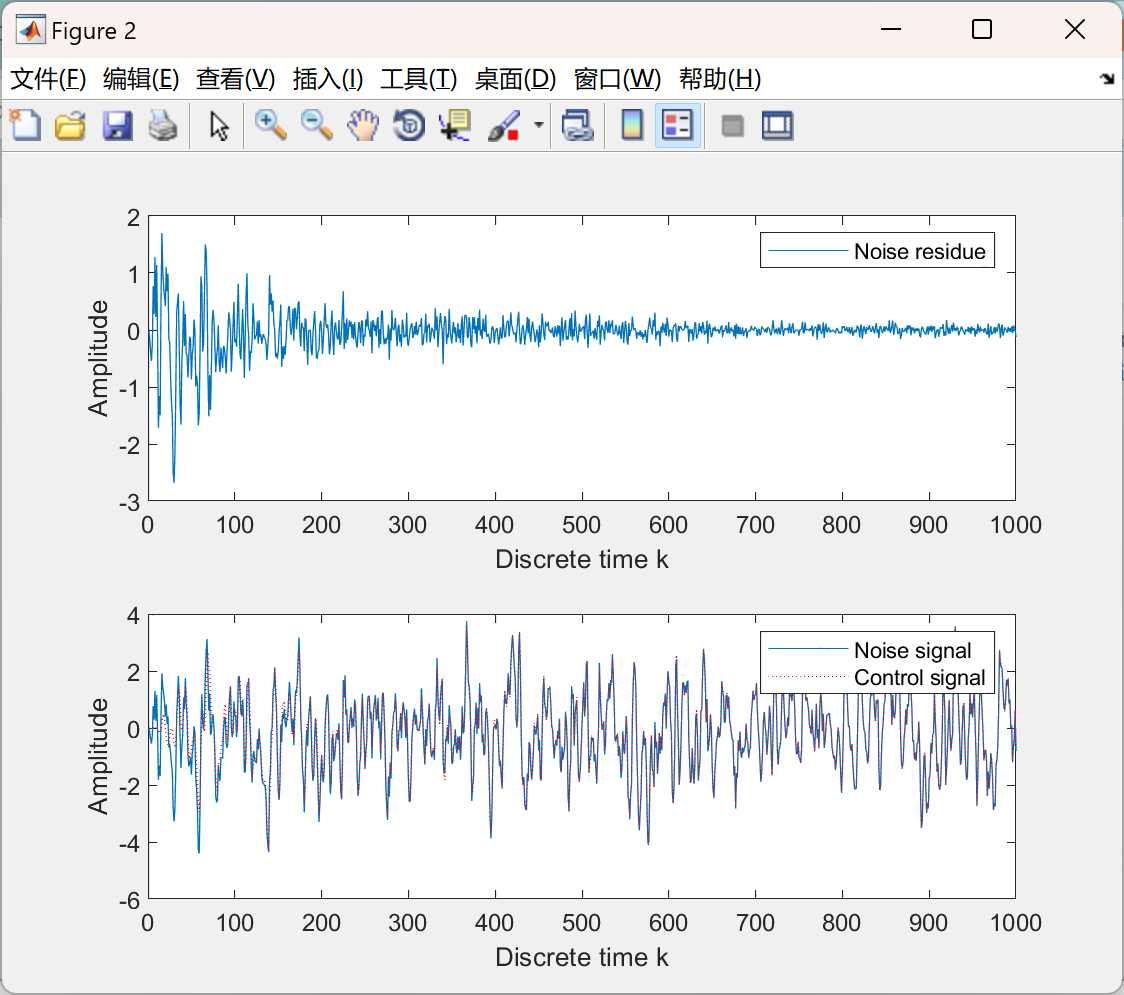
% The second task is the active control itself. Again, we need to simulate
% the actual condition. In practice, it should be an iterative process of
% 'measure', 'control', and 'adjust'; sample by sample. Now, let's generate
% the noise:
X=randn(1,T);
% and measure the arriving noise at the sensor position,
Yd=filter(Pw, 1, X);
% Initiate the system,
Cx=zeros(1,16); % the state of C(z)
Cw=zeros(1,16); % the weight of C(z)
Sx=zeros(size(Sw)); % the dummy state for the secondary path
e_cont=zeros(1,T); % data buffer for the control error
Xhx=zeros(1,16); % the state of the filtered x(k)
% and apply the FxLMS algorithm
mu=0.1; % learning rate
for k=1:T, % discrete time k
Cx=[X(k) Cx(1:15)]; % update the controller state
Cy=sum(Cx.*Cw); % calculate the controller output
Sx=[Cy Sx(1:length(Sx)-1)]; % propagate to secondary path
e_cont(k)=Yd(k)-sum(Sx.*Sw); % measure the residue
Shx=[X(k) Shx(1:15)]; % update the state of Sh(z)
Xhx=[sum(Shx.*Shw) Xhx(1:15)]; % calculate the filtered x(k)
Cw=Cw+mu*e_cont(k)*Xhx; % adjust the controller weight
end
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]秦志峰.酒店建筑空调系统的设计研究[J].江苏建材,2024,(05):69-71.
[2]殷金菊,文新海,张磊.基于等效声辐射功率和形貌优化的变速箱噪声控制[J].汽车实用技术,2024,49(20):73-76.DOI:10.16638/j.cnki.1671-7988.2024.020.014.
🌈4 Matlab代码实现




















 1100
1100

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











