







1.main.launch
<launch>
<param name="/use_sim_time" value="true" />
<!-- start world -->
<node name="gazebo" pkg="gazebo_ros" type="gazebo"
args="$(find a309_room)/worlds/a.world" respawn="false" output="screen" />
<!-- include our robots -->
<include file="$(find multiple_turtlebots_sim)/launch/robots.launch"/>
<!-- load the controllers of WPR1 -->
<include file="$(find wpr_simulation)/launch/wpr1_controllers.launch"/>
<!-- Gmapping -->
<node pkg="gmapping" type="slam_gmapping" name="slam_gmapping">
<param name="base_frame" value="base_footprint"/>
</node>
<!-- Rviz -->
<arg name="model" default="$(find wpr1_bringup)/urdf/wpr1.urdf"/>
<param name="robot_description" command="$(find xacro)/xacro $(arg model)" />
<node name="rviz" pkg="rviz" type="rviz" required="true" />
<!-- Axes Velcmd -->
<param name="axis_linear" value="1" type="int"/>
<param name="axis_angular" value="0" type="int"/>
<param name="scale_linear" value="0.5" type="double"/>
<param name="scale_angular" value="1" type="double"/>
<node pkg="wpr1_bringup" type="wpr1_js_velcmd" name="teleop"/>
</launch>
1.1 启动仿真环境
<!-- start world -->
<node name="gazebo" pkg="gazebo_ros" type="gazebo"
args="$(find a309_room)/worlds/a.world" respawn="false" output="screen" />
这里的世界,是使用ros2的traffic-editor创造了一个简单世界
1.2 加载启明机器人
<!-- include our robots -->
<include file="$(find multiple_turtlebots_sim)/launch/robots.launch"/>
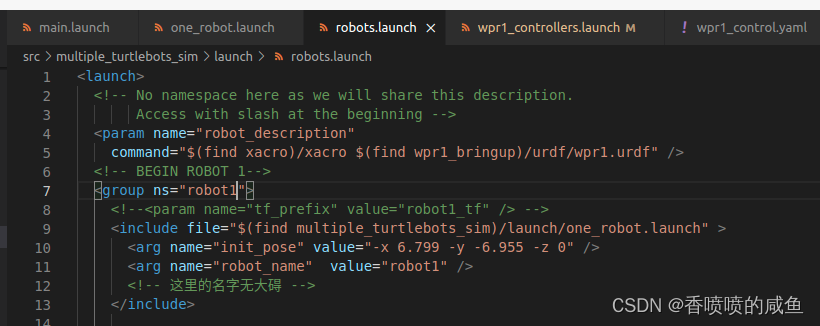
robots.launch:
<launch>
<!-- No namespace here as we will share this description.
Access with slash at the beginning -->
<!-- BEGIN ROBOT 1-->
<group ns="/wpr1">
<!-- <param name="tf_prefix" value="robot1_tf" /> -->
<include file="$(find multiple_turtlebots_sim)/launch/one_robot.launch" >
<arg name="init_pose" value="-x 6.799 -y -6.955 -z 0" />
<arg name="robot_name" value="Robot1" />
</include>
</group>
</launch>
1.robot_description:为启动rviz时,机器人的各个功能提供文件
2.加载gazebo中的机器人one_robot.launch
tf_prefix仅在加载多机器人时用到:
one_robot.launch
<launch>
<arg name="robot_name"/>
<arg name="init_pose"/>
<node name="spawn_minibot_model" pkg="gazebo_ros" type="spawn_model"
args="-file $(find wpr_simulation)/models/wpr1.model $(arg init_pose) -urdf -model $(arg robot_name)"
respawn="false" output="screen" />
<node name="rviz" pkg="rviz" type="rviz" />
</launch>
在gazebo中加载wpr1.model(机器人的模型)
1.3 添加机器人控制
<!-- load the controllers of WPR1 -->
<include file="$(find wpr_simulation)/launch/wpr1_controllers.launch"/>
这里是针对gazebo环境中的。
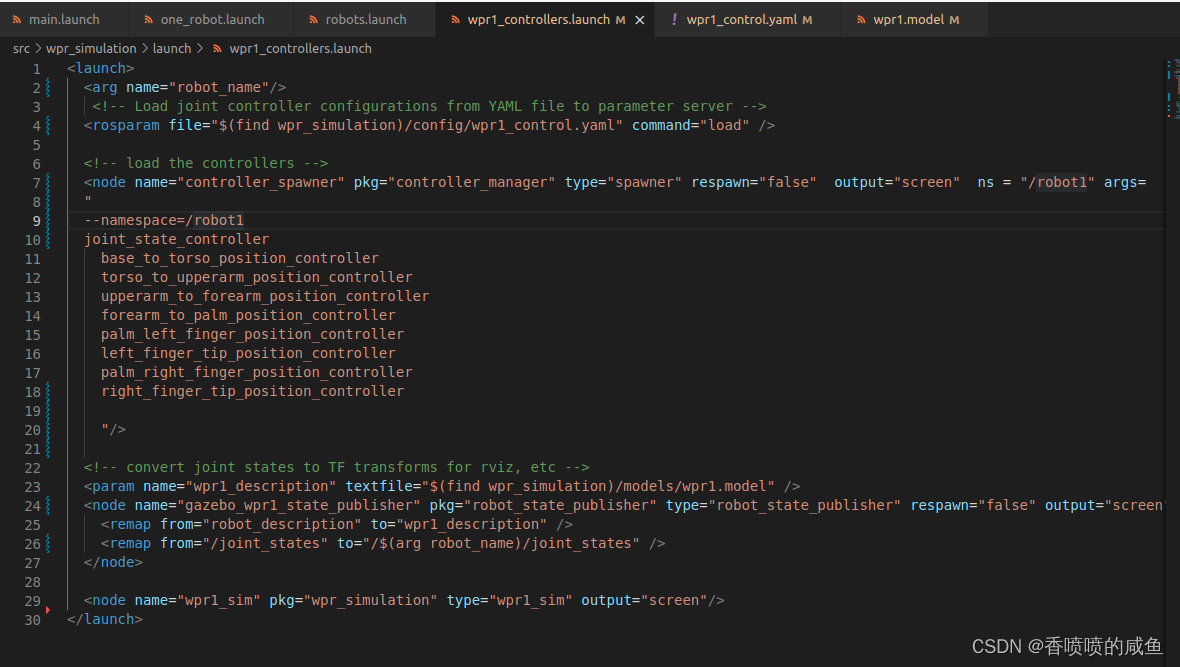
wpr1_controllers.launch
<launch>
<!-- Load joint controller configurations from YAML file to parameter server -->
<rosparam file="$(find wpr_simulation)/config/wpr1_control.yaml" command="load"/>
<!-- load the controllers -->
<node name="controller_spawner" pkg="controller_manager" type="spawner" respawn="false" output="screen" ns="/wpr1" args=
"joint_state_controller
base_to_torso_position_controller
torso_to_upperarm_position_controller
upperarm_to_forearm_position_controller
forearm_to_palm_position_controller
palm_left_finger_position_controller
left_finger_tip_position_controller
palm_right_finger_position_controller
right_finger_tip_position_controller"/>
<!-- convert joint states to TF transforms for rviz, etc -->
<param name="wpr1_description" textfile="$(find wpr_simulation)/models/wpr1.model" />
<node name="gazebo_wpr1_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" respawn="false" output="screen">
<remap from="robot_description" to="wpr1_description" />
<remap from="/joint_states" to="/wpr1/joint_states" />
</node>
<node name="wpr1_sim" pkg="wpr_simulation" type="wpr1_sim" output="screen"/>
</launch>
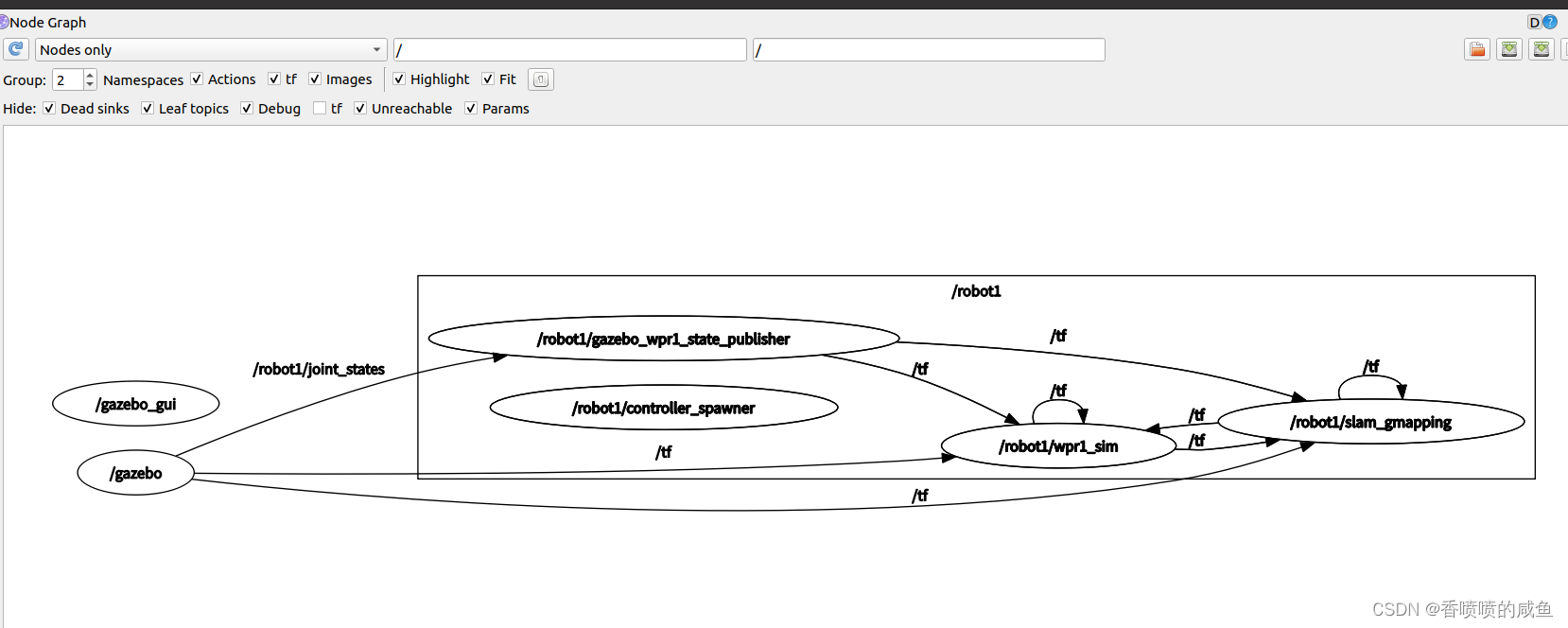
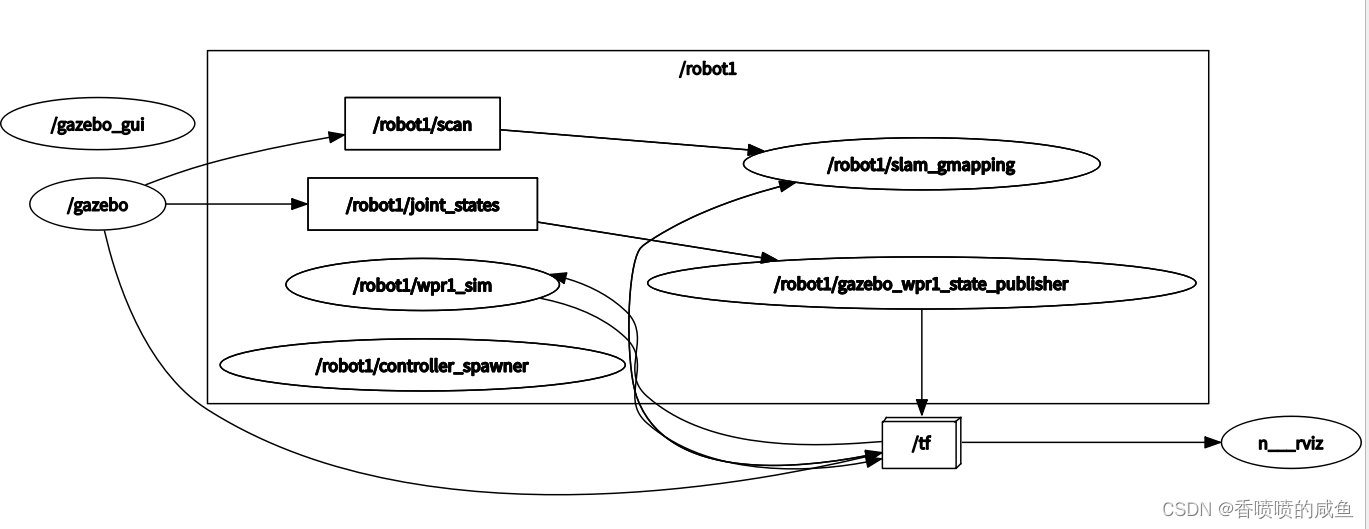
对于启明机器人而言:controller_spawner,对应的是机械臂、深度相机部分,当修改ns为robot1(非原来的wpr1后)会变为:
1.4 添加建图部分
<!-- Gmapping -->
<node pkg="gmapping" type="slam_gmapping" name="slam_gmapping">
<param name="base_frame" value="base_footprint"/>
</node>
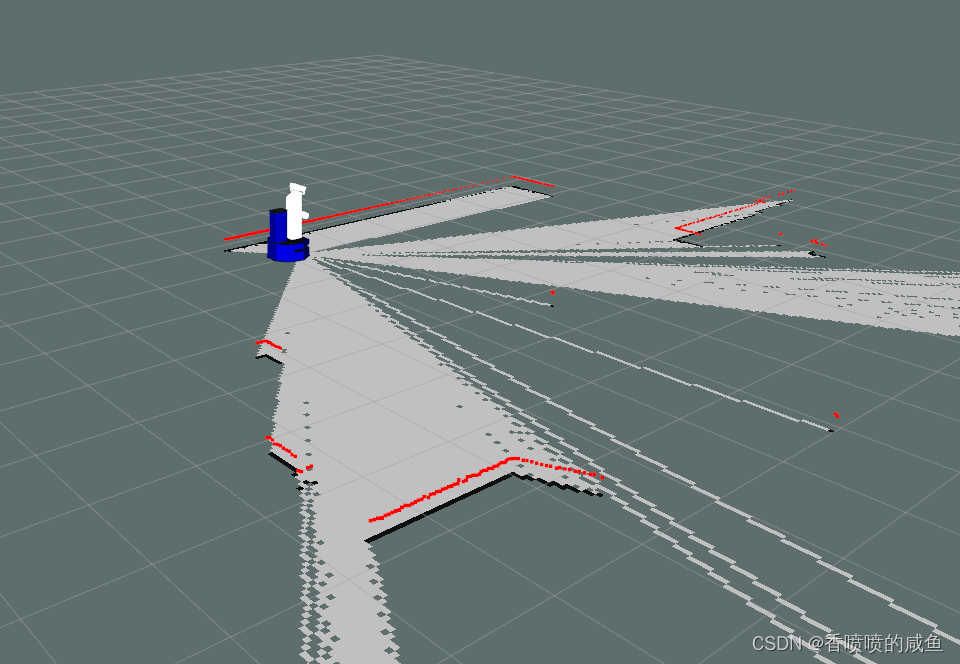
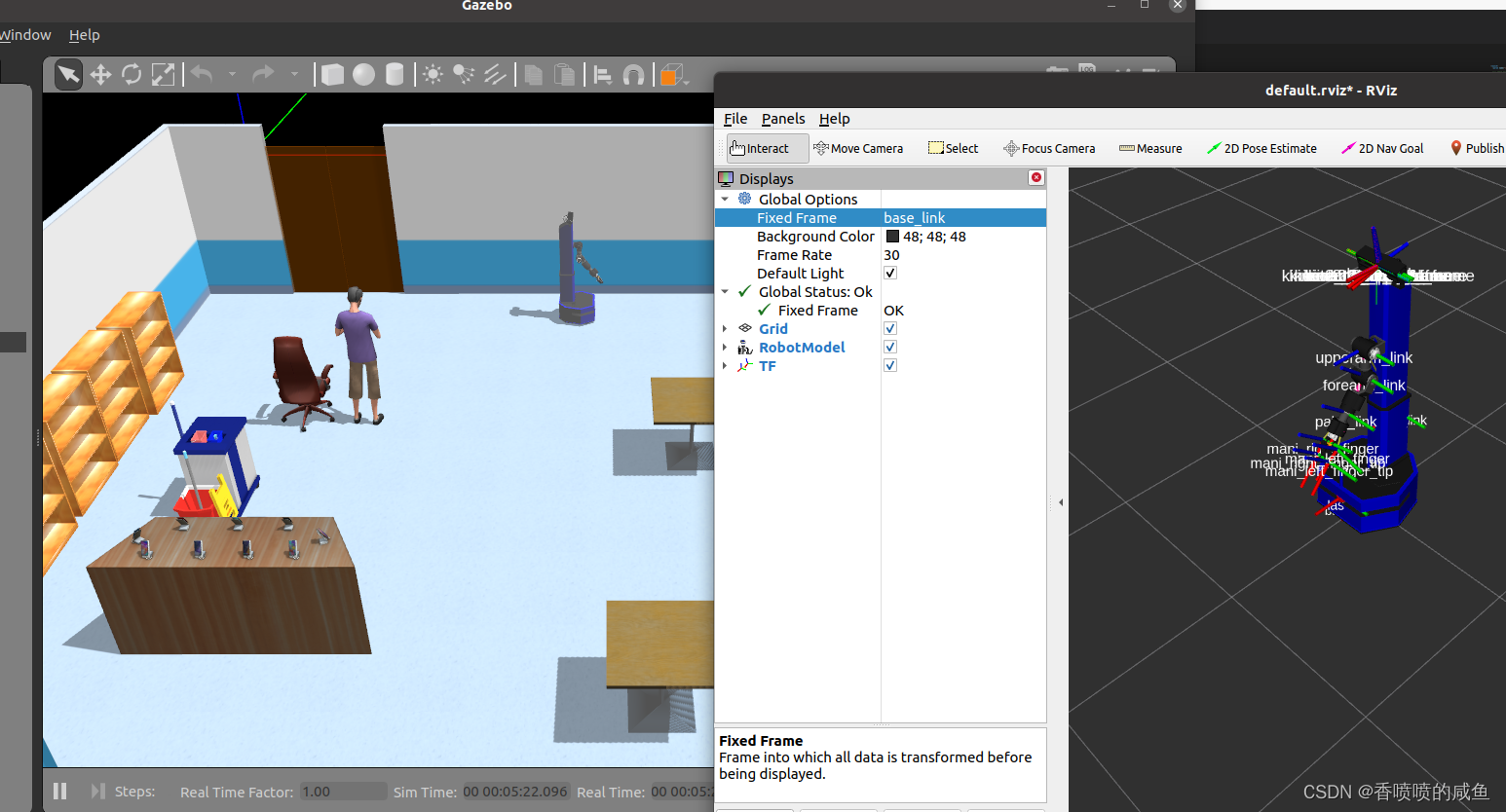
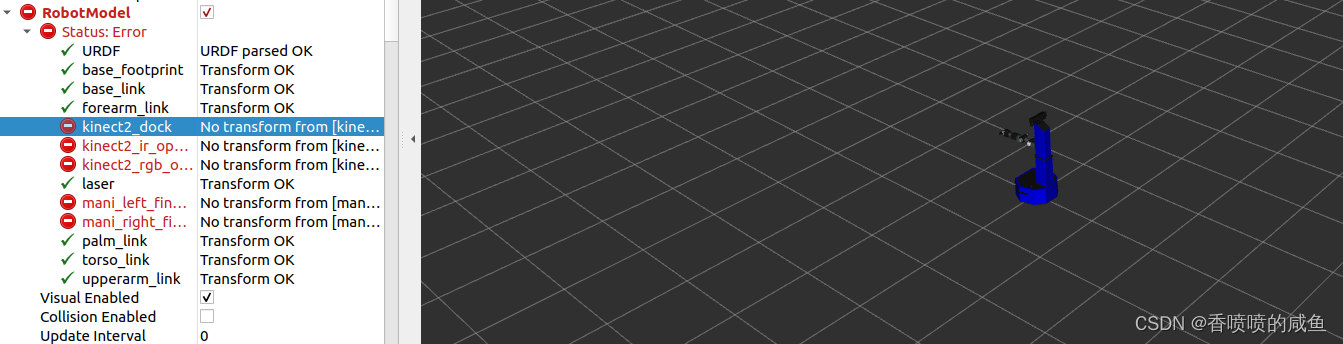
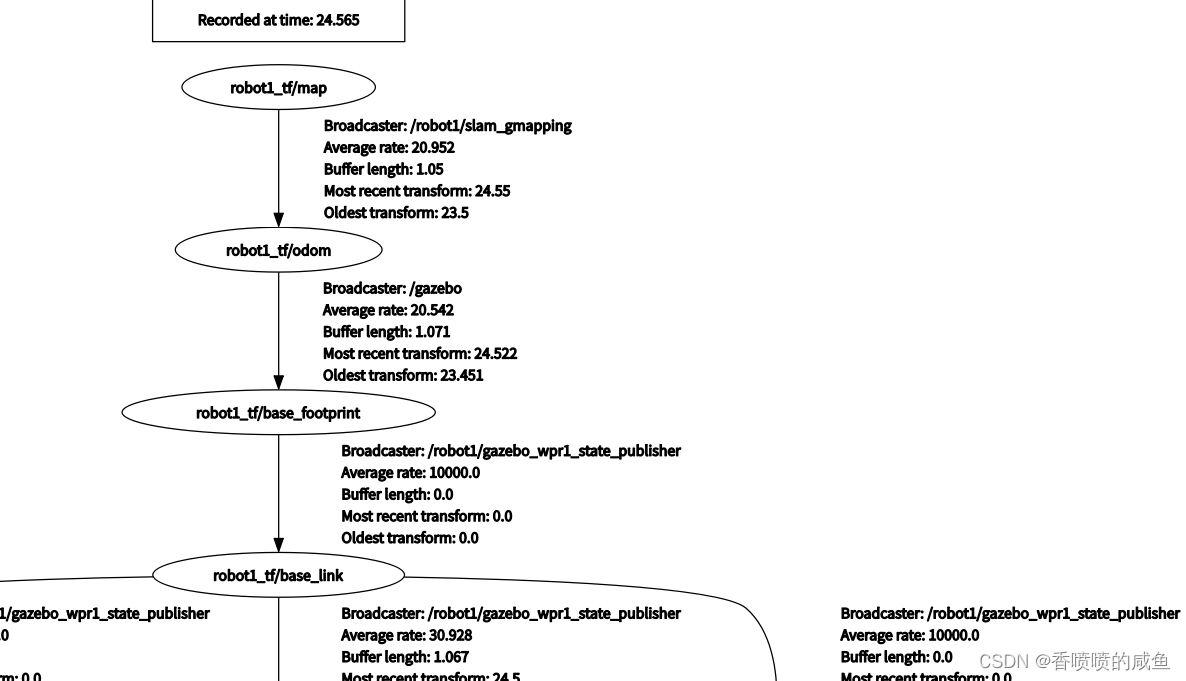
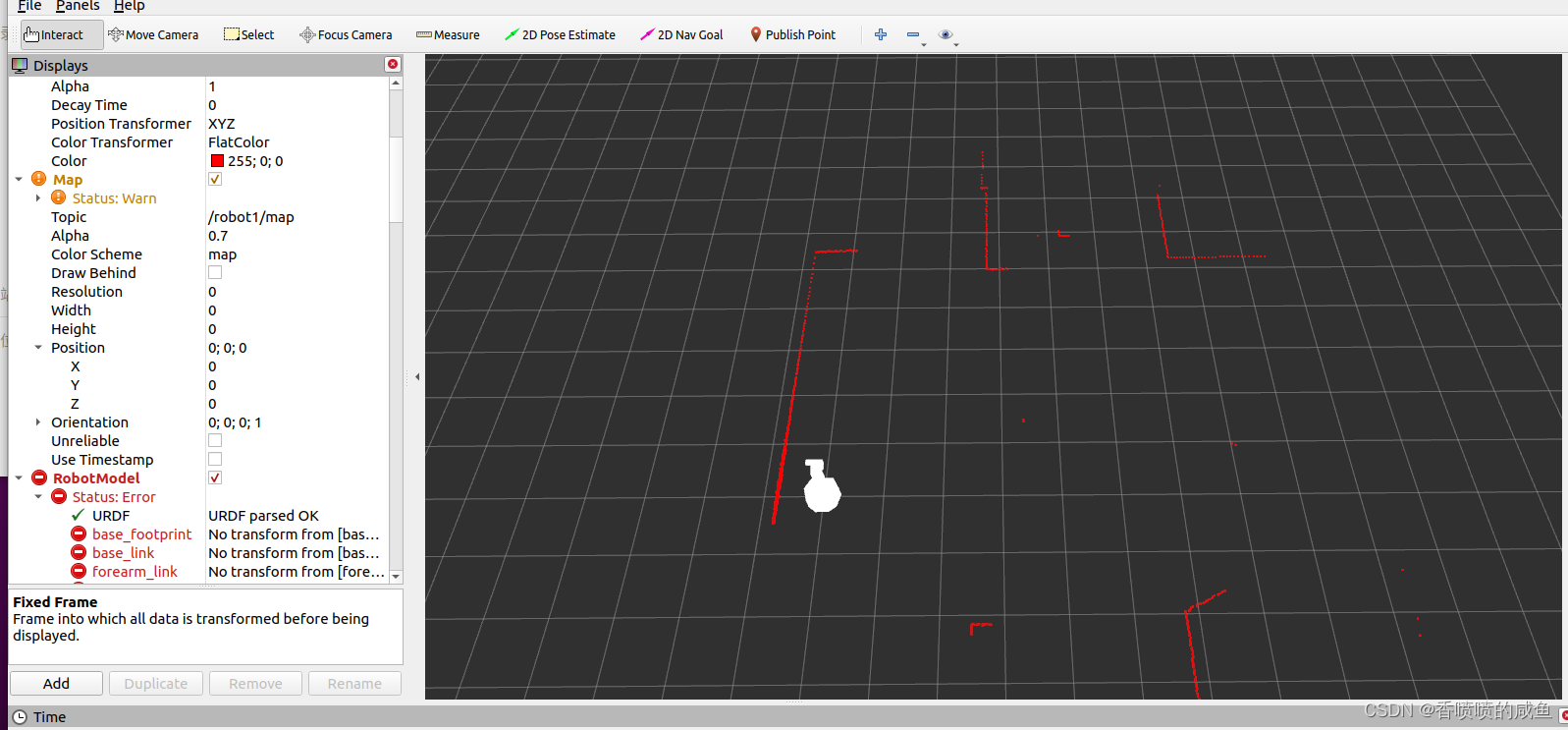
必须添加此部分
机器人才会如此显示,不然只有一个白色的机器人(无slam部分!)
rviz此部分也会正常的tranform,不然就是error!
1.5 添加rviz部分
<!-- Rviz -->
<arg name="model" default="$(find wpr1_bringup)/urdf/wpr1.urdf"/>
<param name="robot_description" command="$(find xacro)/xacro $(arg model)" />
<node name="rviz" pkg="rviz" type="rviz" required="true" />
1.在rviz中加载urdf文件。
2.启动rviz
1.6添加控制部分
<!-- Axes Velcmd -->
<param name="axis_linear" value="1" type="int"/>
<param name="axis_angular" value="0" type="int"/>
<param name="scale_linear" value="0.5" type="double"/>
<param name="scale_angular" value="1" type="double"/>
<node pkg="wpr1_bringup" type="wpr1_js_velcmd" name="teleop"/>
2 演示
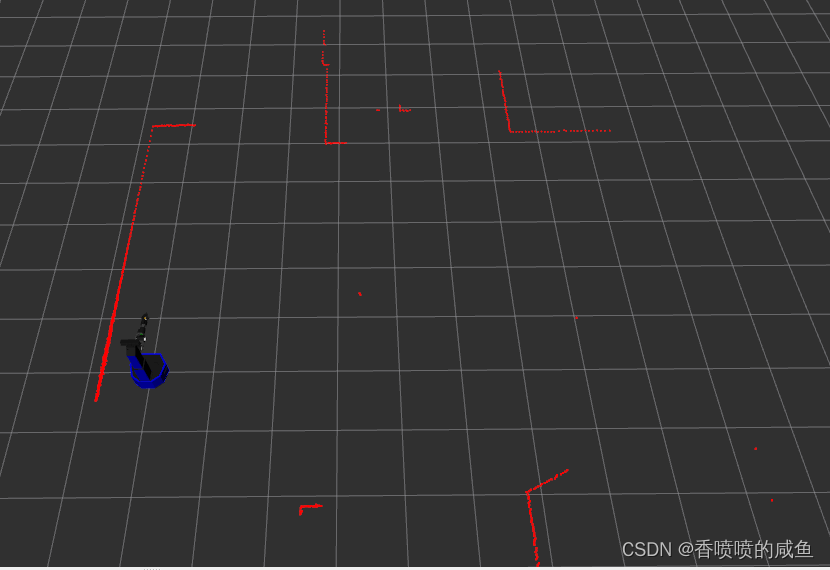
3.控制机器人建图
rosrun teleop_twist_keyboard teleop_twist_keyboard.py /cmd_vel:=/robot1/cmd_vel
gmapping负责建图,在rviz内建完图后
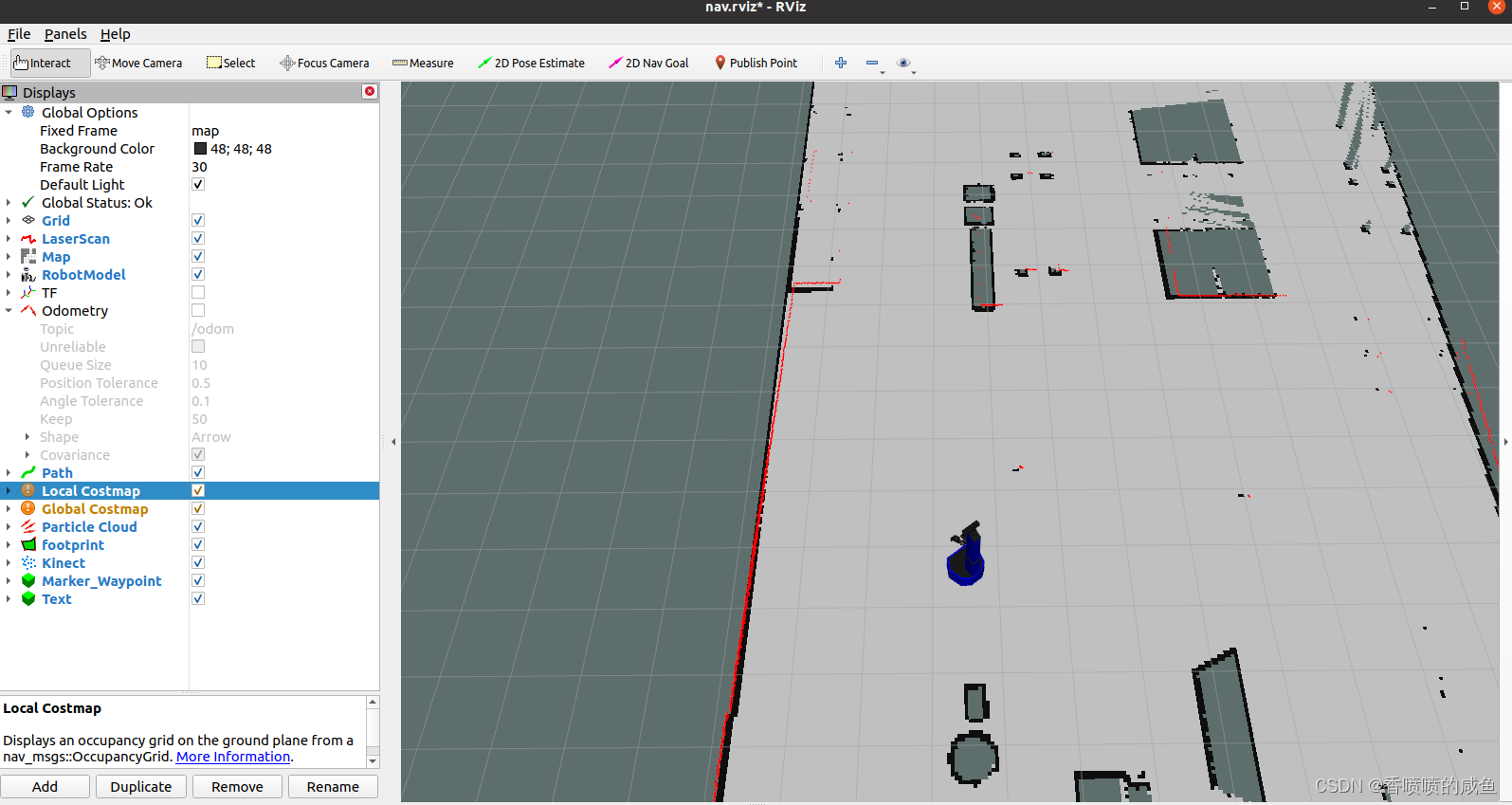
保存:
rz@rz:~/test7-make-map/src/map$ rosrun map_server map_saver -f 309
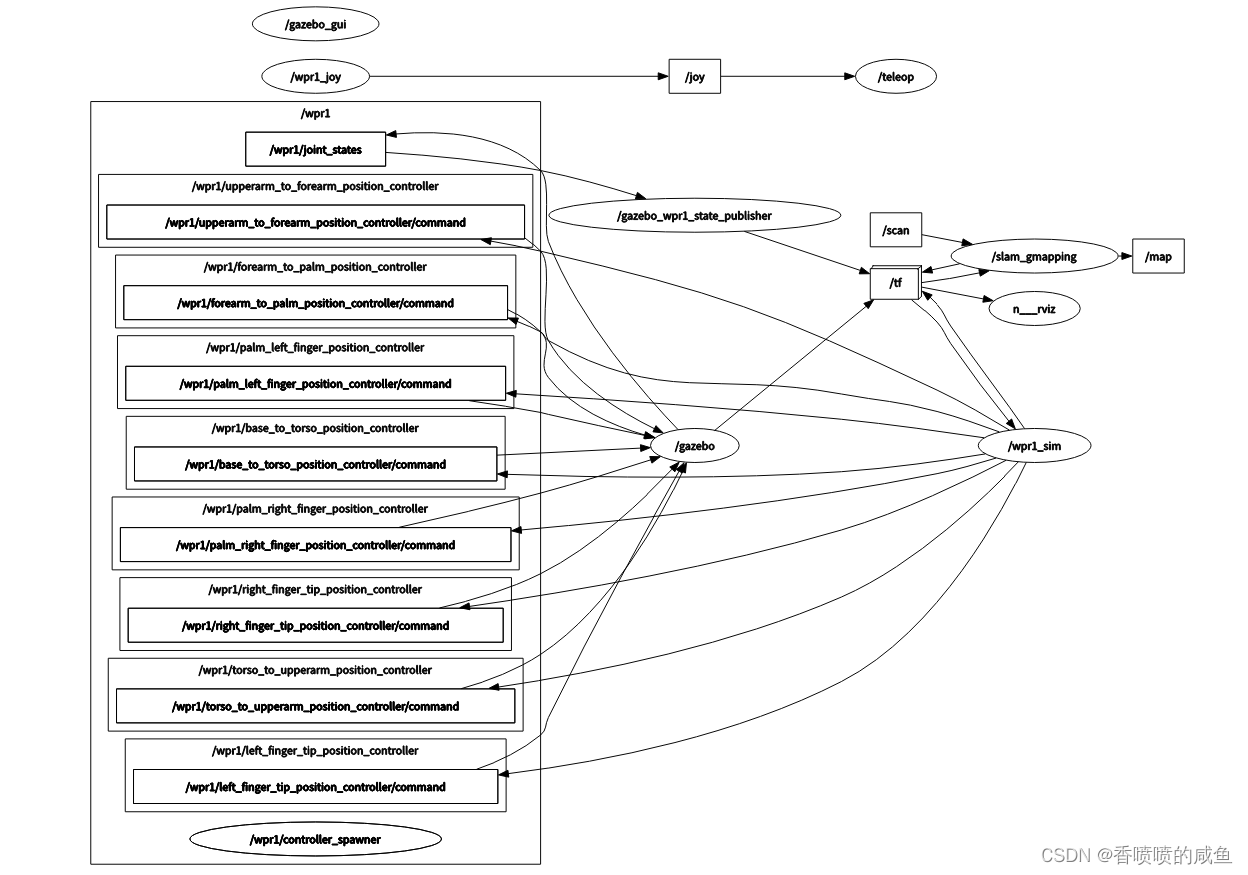
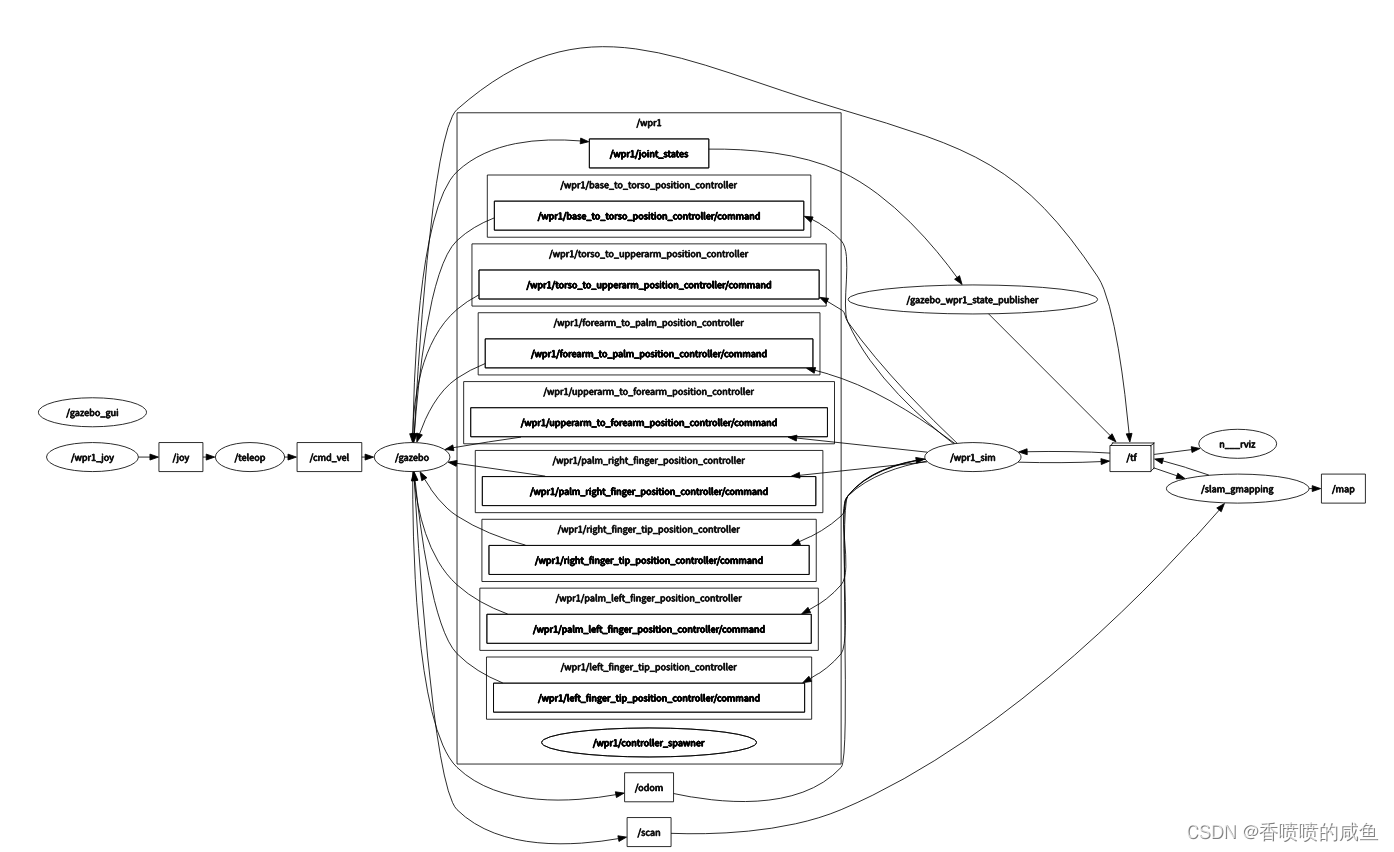
3.1 正常时候的主题
/clicked_point
/clock
/cmd_vel
/gazebo/link_states
/gazebo/model_states
/gazebo/parameter_descriptions
/gazebo/parameter_updates
/gazebo/performance_metrics
/gazebo/set_link_state
/gazebo/set_model_state
/initialpose
/kinect2/hd/camera_info
/kinect2/hd/image_color_rect
/kinect2/hd/image_color_rect/compressed
/kinect2/hd/image_color_rect/compressed/parameter_descriptions
/kinect2/hd/image_color_rect/compressed/parameter_updates
/kinect2/hd/image_color_rect/compressedDepth
/kinect2/hd/image_color_rect/compressedDepth/parameter_descriptions
/kinect2/hd/image_color_rect/compressedDepth/parameter_updates
/kinect2/hd/image_color_rect/theora
/kinect2/hd/image_color_rect/theora/parameter_descriptions
/kinect2/hd/image_color_rect/theora/parameter_updates
/kinect2/hd/parameter_descriptions
/kinect2/hd/parameter_updates
/kinect2/qhd/camera_info
/kinect2/qhd/image_color_rect
/kinect2/qhd/image_color_rect/compressed
/kinect2/qhd/image_color_rect/compressed/parameter_descriptions
/kinect2/qhd/image_color_rect/compressed/parameter_updates
/kinect2/qhd/image_color_rect/compressedDepth
/kinect2/qhd/image_color_rect/compressedDepth/parameter_descriptions
/kinect2/qhd/image_color_rect/compressedDepth/parameter_updates
/kinect2/qhd/image_color_rect/theora
/kinect2/qhd/image_color_rect/theora/parameter_descriptions
/kinect2/qhd/image_color_rect/theora/parameter_updates
/kinect2/qhd/parameter_descriptions
/kinect2/qhd/parameter_updates
/kinect2/qhd/points
/kinect2/sd/camera_info
/kinect2/sd/depth/camera_info
/kinect2/sd/image_depth_rect
/kinect2/sd/image_ir_rect
/kinect2/sd/image_ir_rect/compressed
/kinect2/sd/image_ir_rect/compressed/parameter_descriptions
/kinect2/sd/image_ir_rect/compressed/parameter_updates
/kinect2/sd/image_ir_rect/compressedDepth
/kinect2/sd/image_ir_rect/compressedDepth/parameter_descriptions
/kinect2/sd/image_ir_rect/compressedDepth/parameter_updates
/kinect2/sd/image_ir_rect/theora
/kinect2/sd/image_ir_rect/theora/parameter_descriptions
/kinect2/sd/image_ir_rect/theora/parameter_updates
/kinect2/sd/parameter_descriptions
/kinect2/sd/parameter_updates
/kinect2/sd/points
/map
/map_metadata
/map_updates
/move_base/GlobalPlanner/plan
/move_base/global_costmap/costmap
/move_base/global_costmap/costmap_updates
/move_base/global_costmap/footprint
/move_base/local_costmap/costmap
/move_base/local_costmap/costmap_updates
/move_base_simple/goal
/odom
/particlecloud
/rosout
/rosout_agg
/scan
/slam_gmapping/entropy
/tf
/tf_static
/visualization_marker
/visualization_marker_array
/waypoints_marker
/waypoints_marker_array
/wpr1/base_to_torso_position_controller/command
/wpr1/ctrl
/wpr1/forearm_to_palm_position_controller/command
/wpr1/gazebo_ros_control/pid_gains/base_to_torso/parameter_descriptions
/wpr1/gazebo_ros_control/pid_gains/base_to_torso/parameter_updates
/wpr1/gazebo_ros_control/pid_gains/forearm_to_palm/parameter_descriptions
/wpr1/gazebo_ros_control/pid_gains/forearm_to_palm/parameter_updates
/wpr1/gazebo_ros_control/pid_gains/left_finger_tip/parameter_descriptions
/wpr1/gazebo_ros_control/pid_gains/left_finger_tip/parameter_updates
/wpr1/gazebo_ros_control/pid_gains/palm_left_finger/parameter_descriptions
/wpr1/gazebo_ros_control/pid_gains/palm_left_finger/parameter_updates
/wpr1/gazebo_ros_control/pid_gains/palm_right_finger/parameter_descriptions
/wpr1/gazebo_ros_control/pid_gains/palm_right_finger/parameter_updates
/wpr1/gazebo_ros_control/pid_gains/right_finger_tip/parameter_descriptions
/wpr1/gazebo_ros_control/pid_gains/right_finger_tip/parameter_updates
/wpr1/gazebo_ros_control/pid_gains/torso_to_upperarm/parameter_descriptions
/wpr1/gazebo_ros_control/pid_gains/torso_to_upperarm/parameter_updates
/wpr1/gazebo_ros_control/pid_gains/upperarm_to_forearm/parameter_descriptions
/wpr1/gazebo_ros_control/pid_gains/upperarm_to_forearm/parameter_updates
/wpr1/joint_ctrl
/wpr1/joint_states
/wpr1/left_finger_tip_position_controller/command
/wpr1/palm_left_finger_position_controller/command
/wpr1/palm_right_finger_position_controller/command
/wpr1/pose_diff
/wpr1/right_finger_tip_position_controller/command
/wpr1/torso_to_upperarm_position_controller/command
/wpr1/upperarm_to_forearm_position_controller/command
3.2 添加group ns=robot1 后的主题
/clicked_point
/clock
/gazebo/link_states
/gazebo/model_states
/gazebo/parameter_descriptions
/gazebo/parameter_updates
/gazebo/performance_metrics
/gazebo/set_link_state
/gazebo/set_model_state
/initialpose
/kinect2/qhd/points
/map
/map_metadata
/map_updates
/move_base/GlobalPlanner/plan
/move_base/global_costmap/costmap
/move_base/global_costmap/costmap_updates
/move_base/global_costmap/footprint
/move_base/local_costmap/costmap
/move_base/local_costmap/costmap_updates
/move_base_simple/goal
/odom
/particlecloud
/robot1/cmd_vel
/robot1/joint_states
/robot1/kinect2/hd/camera_info
/robot1/kinect2/hd/image_color_rect
/robot1/kinect2/hd/image_color_rect/compressed
/robot1/kinect2/hd/image_color_rect/compressed/parameter_descriptions
/robot1/kinect2/hd/image_color_rect/compressed/parameter_updates
/robot1/kinect2/hd/image_color_rect/compressedDepth
/robot1/kinect2/hd/image_color_rect/compressedDepth/parameter_descriptions
/robot1/kinect2/hd/image_color_rect/compressedDepth/parameter_updates
/robot1/kinect2/hd/image_color_rect/theora
/robot1/kinect2/hd/image_color_rect/theora/parameter_descriptions
/robot1/kinect2/hd/image_color_rect/theora/parameter_updates
/robot1/kinect2/hd/parameter_descriptions
/robot1/kinect2/hd/parameter_updates
/robot1/kinect2/qhd/camera_info
/robot1/kinect2/qhd/image_color_rect
/robot1/kinect2/qhd/image_color_rect/compressed
/robot1/kinect2/qhd/image_color_rect/compressed/parameter_descriptions
/robot1/kinect2/qhd/image_color_rect/compressed/parameter_updates
/robot1/kinect2/qhd/image_color_rect/compressedDepth
/robot1/kinect2/qhd/image_color_rect/compressedDepth/parameter_descriptions
/robot1/kinect2/qhd/image_color_rect/compressedDepth/parameter_updates
/robot1/kinect2/qhd/image_color_rect/theora
/robot1/kinect2/qhd/image_color_rect/theora/parameter_descriptions
/robot1/kinect2/qhd/image_color_rect/theora/parameter_updates
/robot1/kinect2/qhd/parameter_descriptions
/robot1/kinect2/qhd/parameter_updates
/robot1/kinect2/sd/camera_info
/robot1/kinect2/sd/depth/camera_info
/robot1/kinect2/sd/image_depth_rect
/robot1/kinect2/sd/image_ir_rect
/robot1/kinect2/sd/image_ir_rect/compressed
/robot1/kinect2/sd/image_ir_rect/compressed/parameter_descriptions
/robot1/kinect2/sd/image_ir_rect/compressed/parameter_updates
/robot1/kinect2/sd/image_ir_rect/compressedDepth
/robot1/kinect2/sd/image_ir_rect/compressedDepth/parameter_descriptions
/robot1/kinect2/sd/image_ir_rect/compressedDepth/parameter_updates
/robot1/kinect2/sd/image_ir_rect/theora
/robot1/kinect2/sd/image_ir_rect/theora/parameter_descriptions
/robot1/kinect2/sd/image_ir_rect/theora/parameter_updates
/robot1/kinect2/sd/parameter_descriptions
/robot1/kinect2/sd/parameter_updates
/robot1/kinect2/sd/points
/robot1/odom
/robot1/scan
/rosout
/rosout_agg
/scan
/slam_gmapping/entropy
/tf
/tf_static
/visualization_marker
/visualization_marker_array
/waypoints_marker
/waypoints_marker_array
/wpr1/base_to_torso_position_controller/command
/wpr1/ctrl
/wpr1/forearm_to_palm_position_controller/command
/wpr1/joint_ctrl
/wpr1/left_finger_tip_position_controller/command
/wpr1/palm_left_finger_position_controller/command
/wpr1/palm_right_finger_position_controller/command
/wpr1/pose_diff
/wpr1/right_finger_tip_position_controller/command
/wpr1/torso_to_upperarm_position_controller/command
/wpr1/upperarm_to_forearm_position_controller/command
可以观察到gazebo_ros_control莫名消失,kinetic部分前面多了robot1。
3.3 修改controller_spawner的ns后的主题
/clicked_point
/clock
/gazebo/link_states
/gazebo/model_states
/gazebo/parameter_descriptions
/gazebo/parameter_updates
/gazebo/performance_metrics
/gazebo/set_link_state
/gazebo/set_model_state
/initialpose
/kinect2/qhd/points
/map
/map_metadata
/map_updates
/move_base/GlobalPlanner/plan
/move_base/global_costmap/costmap
/move_base/global_costmap/costmap_updates
/move_base/global_costmap/footprint
/move_base/local_costmap/costmap
/move_base/local_costmap/costmap_updates
/move_base_simple/goal
/odom
/particlecloud
/robot1/cmd_vel
/robot1/joint_states
/robot1/kinect2/hd/camera_info
/robot1/kinect2/hd/image_color_rect
/robot1/kinect2/hd/image_color_rect/compressed
/robot1/kinect2/hd/image_color_rect/compressed/parameter_descriptions
/robot1/kinect2/hd/image_color_rect/compressed/parameter_updates
/robot1/kinect2/hd/image_color_rect/compressedDepth
/robot1/kinect2/hd/image_color_rect/compressedDepth/parameter_descriptions
/robot1/kinect2/hd/image_color_rect/compressedDepth/parameter_updates
/robot1/kinect2/hd/image_color_rect/theora
/robot1/kinect2/hd/image_color_rect/theora/parameter_descriptions
/robot1/kinect2/hd/image_color_rect/theora/parameter_updates
/robot1/kinect2/hd/parameter_descriptions
/robot1/kinect2/hd/parameter_updates
/robot1/kinect2/qhd/camera_info
/robot1/kinect2/qhd/image_color_rect
/robot1/kinect2/qhd/image_color_rect/compressed
/robot1/kinect2/qhd/image_color_rect/compressed/parameter_descriptions
/robot1/kinect2/qhd/image_color_rect/compressed/parameter_updates
/robot1/kinect2/qhd/image_color_rect/compressedDepth
/robot1/kinect2/qhd/image_color_rect/compressedDepth/parameter_descriptions
/robot1/kinect2/qhd/image_color_rect/compressedDepth/parameter_updates
/robot1/kinect2/qhd/image_color_rect/theora
/robot1/kinect2/qhd/image_color_rect/theora/parameter_descriptions
/robot1/kinect2/qhd/image_color_rect/theora/parameter_updates
/robot1/kinect2/qhd/parameter_descriptions
/robot1/kinect2/qhd/parameter_updates
/robot1/kinect2/sd/camera_info
/robot1/kinect2/sd/depth/camera_info
/robot1/kinect2/sd/image_depth_rect
/robot1/kinect2/sd/image_ir_rect
/robot1/kinect2/sd/image_ir_rect/compressed
/robot1/kinect2/sd/image_ir_rect/compressed/parameter_descriptions
/robot1/kinect2/sd/image_ir_rect/compressed/parameter_updates
/robot1/kinect2/sd/image_ir_rect/compressedDepth
/robot1/kinect2/sd/image_ir_rect/compressedDepth/parameter_descriptions
/robot1/kinect2/sd/image_ir_rect/compressedDepth/parameter_updates
/robot1/kinect2/sd/image_ir_rect/theora
/robot1/kinect2/sd/image_ir_rect/theora/parameter_descriptions
/robot1/kinect2/sd/image_ir_rect/theora/parameter_updates
/robot1/kinect2/sd/parameter_descriptions
/robot1/kinect2/sd/parameter_updates
/robot1/kinect2/sd/points
/robot1/odom
/robot1/scan
/rosout
/rosout_agg
/scan
/slam_gmapping/entropy
/tf
/tf_static
/visualization_marker
/visualization_marker_array
/waypoints_marker
/waypoints_marker_array
/wpr1/base_to_torso_position_controller/command
/wpr1/ctrl
/wpr1/forearm_to_palm_position_controller/command
/wpr1/joint_ctrl
/wpr1/left_finger_tip_position_controller/command
/wpr1/palm_left_finger_position_controller/command
/wpr1/palm_right_finger_position_controller/command
/wpr1/pose_diff
/wpr1/right_finger_tip_position_controller/command
/wpr1/torso_to_upperarm_position_controller/command
/wpr1/upperarm_to_forearm_position_controller/command
观察到与3.2无差别
3.4修改wpr1_control.yaml的第一行,去掉wpr1后,主题一样无差别
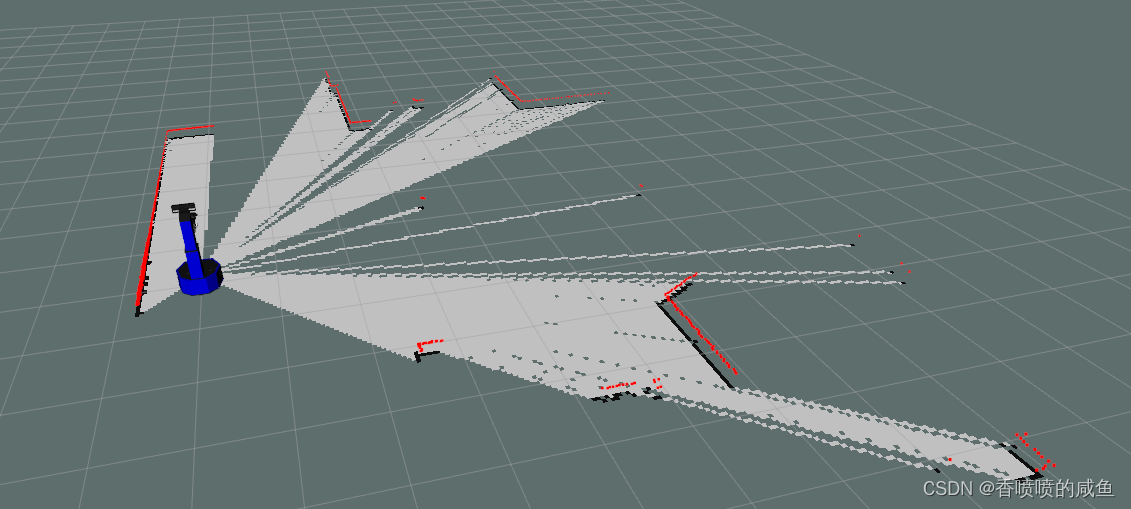
3.5修改wpr1.model的最后一部分的robotnamespace
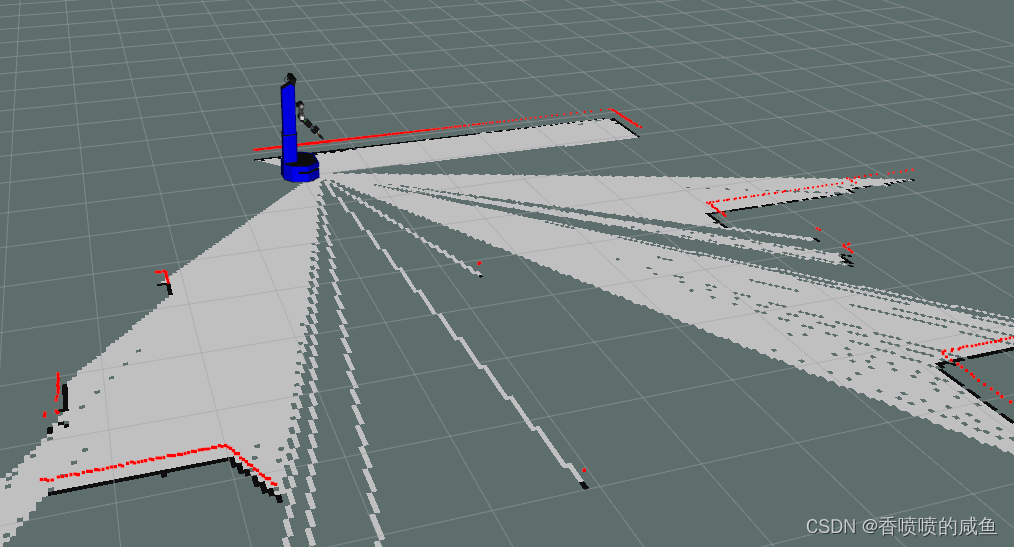
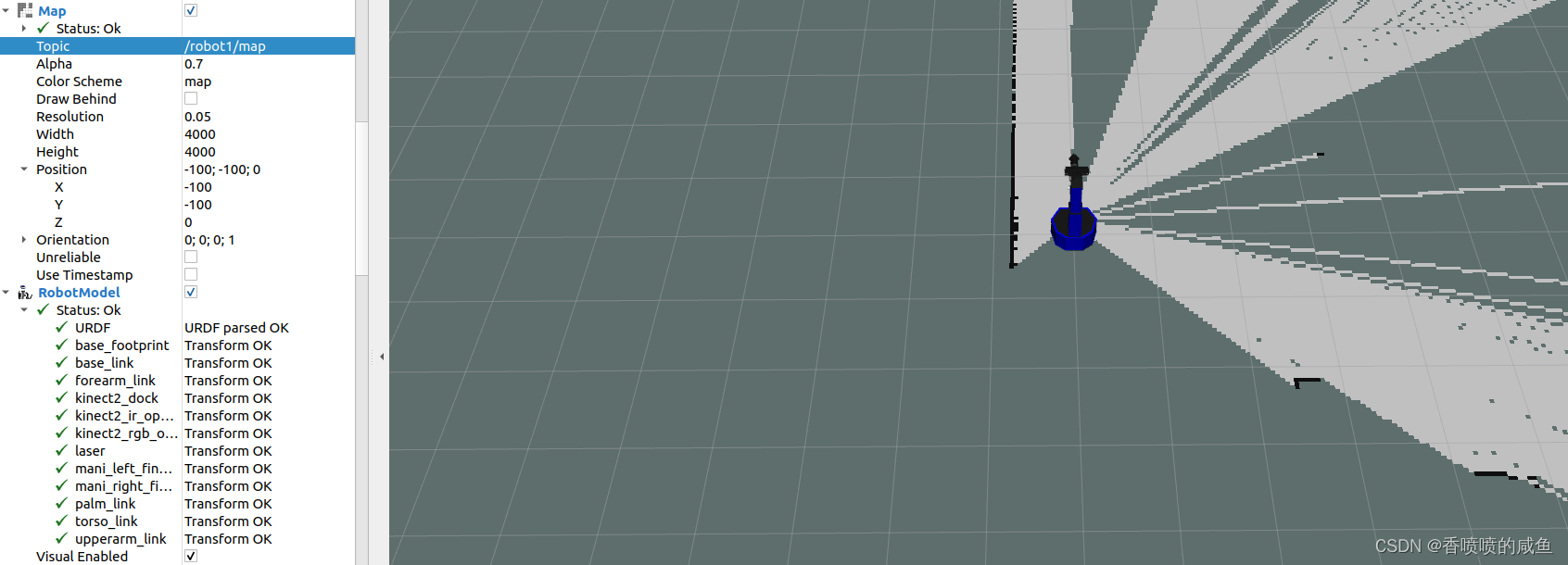
将其去掉后

惊奇地发现rviz出现了新的变化!
启明机器人有了颜色,意味着各部件加载成功?但是激光未加载啊!
且主题变化:
/clicked_point
/clock
/gazebo/link_states
/gazebo/model_states
/gazebo/parameter_descriptions
/gazebo/parameter_updates
/gazebo/performance_metrics
/gazebo/set_link_state
/gazebo/set_model_state
/initialpose
/kinect2/qhd/points
/map
/map_metadata
/map_updates
/move_base/GlobalPlanner/plan
/move_base/global_costmap/costmap
/move_base/global_costmap/costmap_updates
/move_base/global_costmap/footprint
/move_base/local_costmap/costmap
/move_base/local_costmap/costmap_updates
/move_base_simple/goal
/odom
/particlecloud
/robot1/base_to_torso_position_controller/command
/robot1/cmd_vel
/robot1/forearm_to_palm_position_controller/command
/robot1/gazebo_ros_control/pid_gains/base_to_torso/parameter_descriptions
/robot1/gazebo_ros_control/pid_gains/base_to_torso/parameter_updates
/robot1/gazebo_ros_control/pid_gains/forearm_to_palm/parameter_descriptions
/robot1/gazebo_ros_control/pid_gains/forearm_to_palm/parameter_updates
/robot1/gazebo_ros_control/pid_gains/left_finger_tip/parameter_descriptions
/robot1/gazebo_ros_control/pid_gains/left_finger_tip/parameter_updates
/robot1/gazebo_ros_control/pid_gains/palm_left_finger/parameter_descriptions
/robot1/gazebo_ros_control/pid_gains/palm_left_finger/parameter_updates
/robot1/gazebo_ros_control/pid_gains/palm_right_finger/parameter_descriptions
/robot1/gazebo_ros_control/pid_gains/palm_right_finger/parameter_updates
/robot1/gazebo_ros_control/pid_gains/right_finger_tip/parameter_descriptions
/robot1/gazebo_ros_control/pid_gains/right_finger_tip/parameter_updates
/robot1/gazebo_ros_control/pid_gains/torso_to_upperarm/parameter_descriptions
/robot1/gazebo_ros_control/pid_gains/torso_to_upperarm/parameter_updates
/robot1/gazebo_ros_control/pid_gains/upperarm_to_forearm/parameter_descriptions
/robot1/gazebo_ros_control/pid_gains/upperarm_to_forearm/parameter_updates
/robot1/joint_states
/robot1/kinect2/hd/camera_info
/robot1/kinect2/hd/image_color_rect
/robot1/kinect2/hd/image_color_rect/compressed
/robot1/kinect2/hd/image_color_rect/compressed/parameter_descriptions
/robot1/kinect2/hd/image_color_rect/compressed/parameter_updates
/robot1/kinect2/hd/image_color_rect/compressedDepth
/robot1/kinect2/hd/image_color_rect/compressedDepth/parameter_descriptions
/robot1/kinect2/hd/image_color_rect/compressedDepth/parameter_updates
/robot1/kinect2/hd/image_color_rect/theora
/robot1/kinect2/hd/image_color_rect/theora/parameter_descriptions
/robot1/kinect2/hd/image_color_rect/theora/parameter_updates
/robot1/kinect2/hd/parameter_descriptions
/robot1/kinect2/hd/parameter_updates
/robot1/kinect2/qhd/camera_info
/robot1/kinect2/qhd/image_color_rect
/robot1/kinect2/qhd/image_color_rect/compressed
/robot1/kinect2/qhd/image_color_rect/compressed/parameter_descriptions
/robot1/kinect2/qhd/image_color_rect/compressed/parameter_updates
/robot1/kinect2/qhd/image_color_rect/compressedDepth
/robot1/kinect2/qhd/image_color_rect/compressedDepth/parameter_descriptions
/robot1/kinect2/qhd/image_color_rect/compressedDepth/parameter_updates
/robot1/kinect2/qhd/image_color_rect/theora
/robot1/kinect2/qhd/image_color_rect/theora/parameter_descriptions
/robot1/kinect2/qhd/image_color_rect/theora/parameter_updates
/robot1/kinect2/qhd/parameter_descriptions
/robot1/kinect2/qhd/parameter_updates
/robot1/kinect2/sd/camera_info
/robot1/kinect2/sd/depth/camera_info
/robot1/kinect2/sd/image_depth_rect
/robot1/kinect2/sd/image_ir_rect
/robot1/kinect2/sd/image_ir_rect/compressed
/robot1/kinect2/sd/image_ir_rect/compressed/parameter_descriptions
/robot1/kinect2/sd/image_ir_rect/compressed/parameter_updates
/robot1/kinect2/sd/image_ir_rect/compressedDepth
/robot1/kinect2/sd/image_ir_rect/compressedDepth/parameter_descriptions
/robot1/kinect2/sd/image_ir_rect/compressedDepth/parameter_updates
/robot1/kinect2/sd/image_ir_rect/theora
/robot1/kinect2/sd/image_ir_rect/theora/parameter_descriptions
/robot1/kinect2/sd/image_ir_rect/theora/parameter_updates
/robot1/kinect2/sd/parameter_descriptions
/robot1/kinect2/sd/parameter_updates
/robot1/kinect2/sd/points
/robot1/left_finger_tip_position_controller/command
/robot1/odom
/robot1/palm_left_finger_position_controller/command
/robot1/palm_right_finger_position_controller/command
/robot1/right_finger_tip_position_controller/command
/robot1/scan
/robot1/torso_to_upperarm_position_controller/command
/robot1/upperarm_to_forearm_position_controller/command
/rosout
/rosout_agg
/scan
/slam_gmapping/entropy
/tf
/tf_static
/visualization_marker
/visualization_marker_array
/waypoints_marker
/waypoints_marker_array
/wpr1/base_to_torso_position_controller/command
/wpr1/ctrl
/wpr1/forearm_to_palm_position_controller/command
/wpr1/joint_ctrl
/wpr1/left_finger_tip_position_controller/command
/wpr1/palm_left_finger_position_controller/command
/wpr1/palm_right_finger_position_controller/command
/wpr1/pose_diff
/wpr1/right_finger_tip_position_controller/command
/wpr1/torso_to_upperarm_position_controller/command
/wpr1/upperarm_to_forearm_position_controller/command
多出来了gazebo_control
3.6 给建图(gmapping)部分添加ns=/robot1
/clicked_point
/clock
/gazebo/link_states
/gazebo/model_states
/gazebo/parameter_descriptions
/gazebo/parameter_updates
/gazebo/performance_metrics
/gazebo/set_link_state
/gazebo/set_model_state
/initialpose
/kinect2/qhd/points
/map
/map_updates
/move_base/GlobalPlanner/plan
/move_base/global_costmap/costmap
/move_base/global_costmap/costmap_updates
/move_base/global_costmap/footprint
/move_base/local_costmap/costmap
/move_base/local_costmap/costmap_updates
/move_base_simple/goal
/odom
/particlecloud
/robot1/base_to_torso_position_controller/command
/robot1/cmd_vel
/robot1/forearm_to_palm_position_controller/command
/robot1/gazebo_ros_control/pid_gains/base_to_torso/parameter_descriptions
/robot1/gazebo_ros_control/pid_gains/base_to_torso/parameter_updates
/robot1/gazebo_ros_control/pid_gains/forearm_to_palm/parameter_descriptions
/robot1/gazebo_ros_control/pid_gains/forearm_to_palm/parameter_updates
/robot1/gazebo_ros_control/pid_gains/left_finger_tip/parameter_descriptions
/robot1/gazebo_ros_control/pid_gains/left_finger_tip/parameter_updates
/robot1/gazebo_ros_control/pid_gains/palm_left_finger/parameter_descriptions
/robot1/gazebo_ros_control/pid_gains/palm_left_finger/parameter_updates
/robot1/gazebo_ros_control/pid_gains/palm_right_finger/parameter_descriptions
/robot1/gazebo_ros_control/pid_gains/palm_right_finger/parameter_updates
/robot1/gazebo_ros_control/pid_gains/right_finger_tip/parameter_descriptions
/robot1/gazebo_ros_control/pid_gains/right_finger_tip/parameter_updates
/robot1/gazebo_ros_control/pid_gains/torso_to_upperarm/parameter_descriptions
/robot1/gazebo_ros_control/pid_gains/torso_to_upperarm/parameter_updates
/robot1/gazebo_ros_control/pid_gains/upperarm_to_forearm/parameter_descriptions
/robot1/gazebo_ros_control/pid_gains/upperarm_to_forearm/parameter_updates
/robot1/joint_states
/robot1/kinect2/hd/camera_info
/robot1/kinect2/hd/image_color_rect
/robot1/kinect2/hd/image_color_rect/compressed
/robot1/kinect2/hd/image_color_rect/compressed/parameter_descriptions
/robot1/kinect2/hd/image_color_rect/compressed/parameter_updates
/robot1/kinect2/hd/image_color_rect/compressedDepth
/robot1/kinect2/hd/image_color_rect/compressedDepth/parameter_descriptions
/robot1/kinect2/hd/image_color_rect/compressedDepth/parameter_updates
/robot1/kinect2/hd/image_color_rect/theora
/robot1/kinect2/hd/image_color_rect/theora/parameter_descriptions
/robot1/kinect2/hd/image_color_rect/theora/parameter_updates
/robot1/kinect2/hd/parameter_descriptions
/robot1/kinect2/hd/parameter_updates
/robot1/kinect2/qhd/camera_info
/robot1/kinect2/qhd/image_color_rect
/robot1/kinect2/qhd/image_color_rect/compressed
/robot1/kinect2/qhd/image_color_rect/compressed/parameter_descriptions
/robot1/kinect2/qhd/image_color_rect/compressed/parameter_updates
/robot1/kinect2/qhd/image_color_rect/compressedDepth
/robot1/kinect2/qhd/image_color_rect/compressedDepth/parameter_descriptions
/robot1/kinect2/qhd/image_color_rect/compressedDepth/parameter_updates
/robot1/kinect2/qhd/image_color_rect/theora
/robot1/kinect2/qhd/image_color_rect/theora/parameter_descriptions
/robot1/kinect2/qhd/image_color_rect/theora/parameter_updates
/robot1/kinect2/qhd/parameter_descriptions
/robot1/kinect2/qhd/parameter_updates
/robot1/kinect2/sd/camera_info
/robot1/kinect2/sd/depth/camera_info
/robot1/kinect2/sd/image_depth_rect
/robot1/kinect2/sd/image_ir_rect
/robot1/kinect2/sd/image_ir_rect/compressed
/robot1/kinect2/sd/image_ir_rect/compressed/parameter_descriptions
/robot1/kinect2/sd/image_ir_rect/compressed/parameter_updates
/robot1/kinect2/sd/image_ir_rect/compressedDepth
/robot1/kinect2/sd/image_ir_rect/compressedDepth/parameter_descriptions
/robot1/kinect2/sd/image_ir_rect/compressedDepth/parameter_updates
/robot1/kinect2/sd/image_ir_rect/theora
/robot1/kinect2/sd/image_ir_rect/theora/parameter_descriptions
/robot1/kinect2/sd/image_ir_rect/theora/parameter_updates
/robot1/kinect2/sd/parameter_descriptions
/robot1/kinect2/sd/parameter_updates
/robot1/kinect2/sd/points
/robot1/left_finger_tip_position_controller/command
/robot1/map
/robot1/map_metadata
/robot1/odom
/robot1/palm_left_finger_position_controller/command
/robot1/palm_right_finger_position_controller/command
/robot1/right_finger_tip_position_controller/command
/robot1/scan
/robot1/slam_gmapping/entropy
/robot1/torso_to_upperarm_position_controller/command
/robot1/upperarm_to_forearm_position_controller/command
/rosout
/rosout_agg
/tf
/tf_static
/visualization_marker
/visualization_marker_array
/waypoints_marker
/waypoints_marker_array
/wpr1/base_to_torso_position_controller/command
/wpr1/ctrl
/wpr1/forearm_to_palm_position_controller/command
/wpr1/joint_ctrl
/wpr1/left_finger_tip_position_controller/command
/wpr1/palm_left_finger_position_controller/command
/wpr1/palm_right_finger_position_controller/command
/wpr1/pose_diff
/wpr1/right_finger_tip_position_controller/command
/wpr1/torso_to_upperarm_position_controller/command
/wpr1/upperarm_to_forearm_position_controller/command
主题拥有了robot1/scan
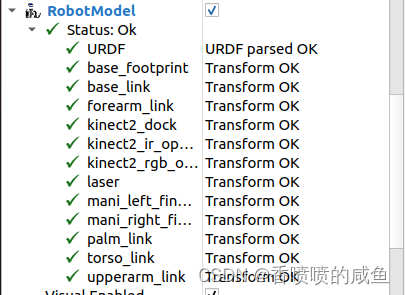
3.7 删除robot_state_publisher内的参数
删除之前:

主题没有报错!
且主题与删除后保持一致,这应该与rviz的tf相关!得保留这部分的映射。
删除后:

主题:
/clicked_point
/clock
/gazebo/link_states
/gazebo/model_states
/gazebo/parameter_descriptions
/gazebo/parameter_updates
/gazebo/performance_metrics
/gazebo/set_link_state
/gazebo/set_model_state
/initialpose
/kinect2/qhd/points
/move_base/GlobalPlanner/plan
/move_base/global_costmap/costmap
/move_base/global_costmap/costmap_updates
/move_base/global_costmap/footprint
/move_base/local_costmap/costmap
/move_base/local_costmap/costmap_updates
/move_base_simple/goal
/odom
/particlecloud
/robot1/base_to_torso_position_controller/command
/robot1/cmd_vel
/robot1/forearm_to_palm_position_controller/command
/robot1/gazebo_ros_control/pid_gains/base_to_torso/parameter_descriptions
/robot1/gazebo_ros_control/pid_gains/base_to_torso/parameter_updates
/robot1/gazebo_ros_control/pid_gains/forearm_to_palm/parameter_descriptions
/robot1/gazebo_ros_control/pid_gains/forearm_to_palm/parameter_updates
/robot1/gazebo_ros_control/pid_gains/left_finger_tip/parameter_descriptions
/robot1/gazebo_ros_control/pid_gains/left_finger_tip/parameter_updates
/robot1/gazebo_ros_control/pid_gains/palm_left_finger/parameter_descriptions
/robot1/gazebo_ros_control/pid_gains/palm_left_finger/parameter_updates
/robot1/gazebo_ros_control/pid_gains/palm_right_finger/parameter_descriptions
/robot1/gazebo_ros_control/pid_gains/palm_right_finger/parameter_updates
/robot1/gazebo_ros_control/pid_gains/right_finger_tip/parameter_descriptions
/robot1/gazebo_ros_control/pid_gains/right_finger_tip/parameter_updates
/robot1/gazebo_ros_control/pid_gains/torso_to_upperarm/parameter_descriptions
/robot1/gazebo_ros_control/pid_gains/torso_to_upperarm/parameter_updates
/robot1/gazebo_ros_control/pid_gains/upperarm_to_forearm/parameter_descriptions
/robot1/gazebo_ros_control/pid_gains/upperarm_to_forearm/parameter_updates
/robot1/joint_states
/robot1/kinect2/hd/camera_info
/robot1/kinect2/hd/image_color_rect
/robot1/kinect2/hd/image_color_rect/compressed
/robot1/kinect2/hd/image_color_rect/compressed/parameter_descriptions
/robot1/kinect2/hd/image_color_rect/compressed/parameter_updates
/robot1/kinect2/hd/image_color_rect/compressedDepth
/robot1/kinect2/hd/image_color_rect/compressedDepth/parameter_descriptions
/robot1/kinect2/hd/image_color_rect/compressedDepth/parameter_updates
/robot1/kinect2/hd/image_color_rect/theora
/robot1/kinect2/hd/image_color_rect/theora/parameter_descriptions
/robot1/kinect2/hd/image_color_rect/theora/parameter_updates
/robot1/kinect2/hd/parameter_descriptions
/robot1/kinect2/hd/parameter_updates
/robot1/kinect2/qhd/camera_info
/robot1/kinect2/qhd/image_color_rect
/robot1/kinect2/qhd/image_color_rect/compressed
/robot1/kinect2/qhd/image_color_rect/compressed/parameter_descriptions
/robot1/kinect2/qhd/image_color_rect/compressed/parameter_updates
/robot1/kinect2/qhd/image_color_rect/compressedDepth
/robot1/kinect2/qhd/image_color_rect/compressedDepth/parameter_descriptions
/robot1/kinect2/qhd/image_color_rect/compressedDepth/parameter_updates
/robot1/kinect2/qhd/image_color_rect/theora
/robot1/kinect2/qhd/image_color_rect/theora/parameter_descriptions
/robot1/kinect2/qhd/image_color_rect/theora/parameter_updates
/robot1/kinect2/qhd/parameter_descriptions
/robot1/kinect2/qhd/parameter_updates
/robot1/kinect2/sd/camera_info
/robot1/kinect2/sd/depth/camera_info
/robot1/kinect2/sd/image_depth_rect
/robot1/kinect2/sd/image_ir_rect
/robot1/kinect2/sd/image_ir_rect/compressed
/robot1/kinect2/sd/image_ir_rect/compressed/parameter_descriptions
/robot1/kinect2/sd/image_ir_rect/compressed/parameter_updates
/robot1/kinect2/sd/image_ir_rect/compressedDepth
/robot1/kinect2/sd/image_ir_rect/compressedDepth/parameter_descriptions
/robot1/kinect2/sd/image_ir_rect/compressedDepth/parameter_updates
/robot1/kinect2/sd/image_ir_rect/theora
/robot1/kinect2/sd/image_ir_rect/theora/parameter_descriptions
/robot1/kinect2/sd/image_ir_rect/theora/parameter_updates
/robot1/kinect2/sd/parameter_descriptions
/robot1/kinect2/sd/parameter_updates
/robot1/kinect2/sd/points
/robot1/left_finger_tip_position_controller/command
/robot1/map
/robot1/map_metadata
/robot1/map_updates
/robot1/odom
/robot1/palm_left_finger_position_controller/command
/robot1/palm_right_finger_position_controller/command
/robot1/right_finger_tip_position_controller/command
/robot1/scan
/robot1/slam_gmapping/entropy
/robot1/torso_to_upperarm_position_controller/command
/robot1/upperarm_to_forearm_position_controller/command
/rosout
/rosout_agg
/scan
/tf
/tf_static
/visualization_marker
/visualization_marker_array
/waypoints_marker
/waypoints_marker_array
/wpr1/base_to_torso_position_controller/command
/wpr1/ctrl
/wpr1/forearm_to_palm_position_controller/command
/wpr1/joint_ctrl
/wpr1/left_finger_tip_position_controller/command
/wpr1/palm_left_finger_position_controller/command
/wpr1/palm_right_finger_position_controller/command
/wpr1/pose_diff
/wpr1/right_finger_tip_position_controller/command
/wpr1/torso_to_upperarm_position_controller/command
/wpr1/upperarm_to_forearm_position_controller/command
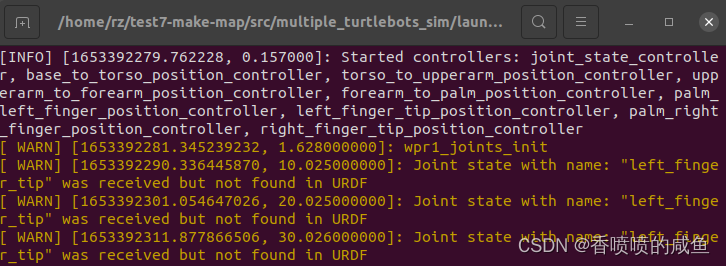
有问题:
3.8 调整controller_manager
根据https://answers.ros.org/question/233413/controller-manager-problem-for-multiple-robots-in-simulation/
增加了ns和namespace,然而经检测后,加不加的效果都一样…
还是加上吧
3.9 增加tf_prefix
增加后:

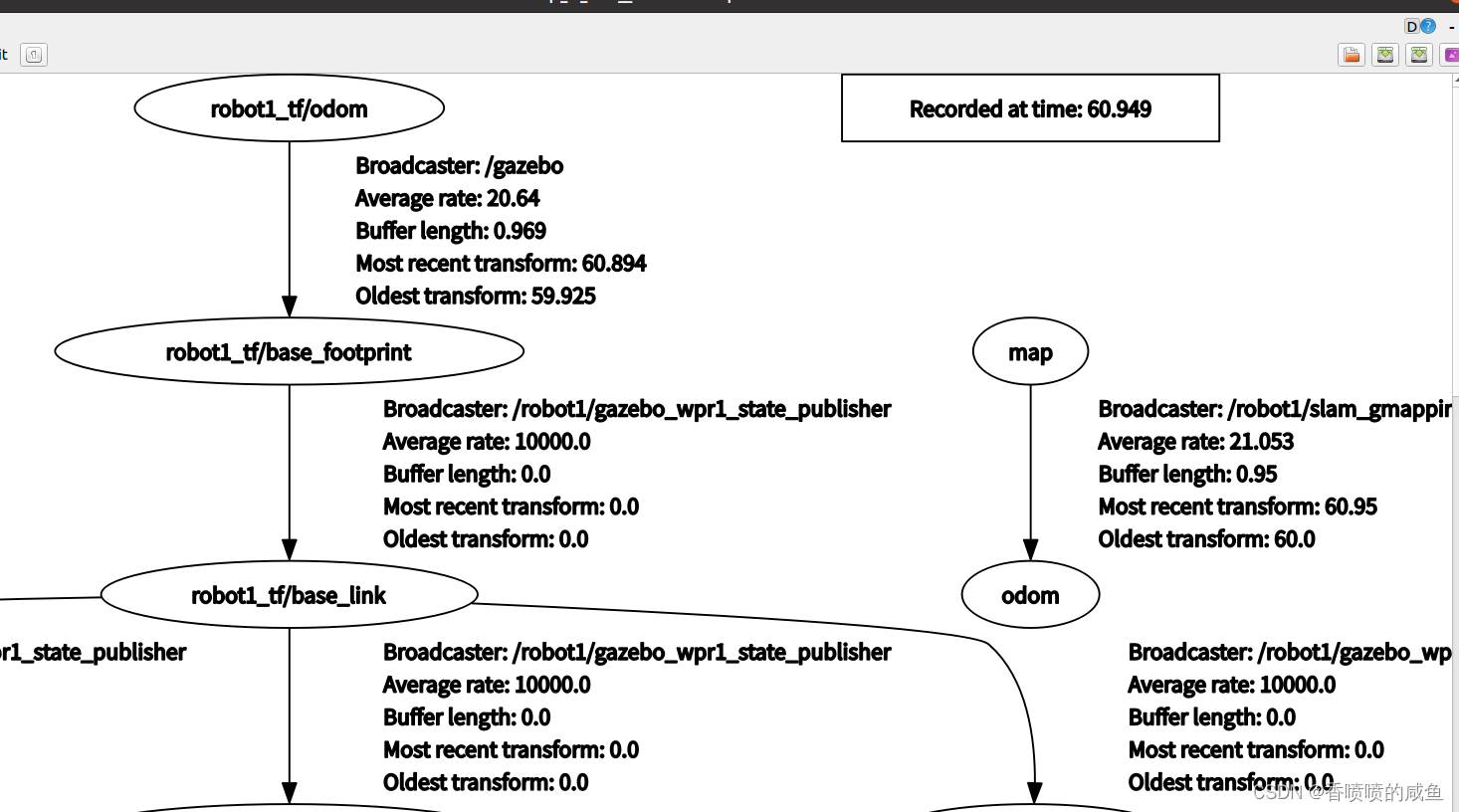
若没有tf_prefix:
rviz显示正常!
所以!问题在odom到base_footprint的过程!需要修改一个名称,
让map->robot_tf/odom即可!
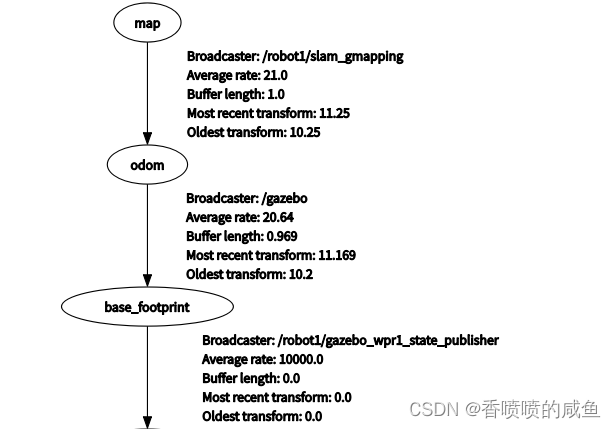
3.10 修改gmapping部分,改变节点名称。
但是此部分是正确的!命名空间的名称就应该与tf_prefix一致。

但是rviz中机器人依旧显示不正常,且无法建图
3.11 设置加载机器人到tf的机器人描述的命名空间
<!-- convert joint states to TF transforms for rviz, etc -->
<param name="/robot1/wpr1_description" textfile="$(find wpr_simulation)/models/wpr1.model" />
<!-- 参数设置命名空间前面一定要添加/ -->
之前一定要添加/
3.12设置rviz
在

4.机器人导航
catkin_create_pkg my_localizer_launcher
导入my_location.launch
<launch>
<!-- start world -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(find a309_room)/worlds/a.world"/>
<arg name="paused" value="false"/>
<arg name="use_sim_time" value="true"/>
<arg name="gui" value="true"/>
<arg name="recording" value="false"/>
<arg name="debug" value="false"/>
</include>
<!-- include our robots -->
<include file="$(find multiple_turtlebots_sim)/launch/robots.launch"/>
<!-- load the controllers of WPR1 -->
<include file="$(find wpr_simulation)/launch/wpr1_controllers.launch"/>
<!-- Run the map server -->
<node name="map_server" pkg="map_server" type="map_server" args="$(find wpr_simulation)/maps/309.yaml"/>
<!--- Run AMCL -->
<include file="$(find wpr1_tutorials)/nav_lidar/amcl_omni.launch" />
<!-- Rviz -->
<arg name="model" default="$(find wpr1_bringup)/urdf/wpr1.urdf"/>
<param name="robot_description" command="$(find xacro)/xacro $(arg model)" />
<arg name="rvizconfig" default="$(find wpr_simulation)/rviz/nav.rviz" />
<node name="rviz" pkg="rviz" type="rviz" args="-d $(arg rvizconfig)" required="true" />
<!--- Run Move_Base -->
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
<rosparam file="$(find wpr1_tutorials)/nav_lidar/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find wpr1_tutorials)/nav_lidar/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find wpr1_tutorials)/nav_lidar/local_costmap_params.yaml" command="load" />
<rosparam file="$(find wpr1_tutorials)/nav_lidar/global_costmap_params.yaml" command="load" />
<param name="base_global_planner" value="global_planner/GlobalPlanner" />
<param name="use_dijkstra" value="true"/>
<param name="base_local_planner" value="wpr1_local_planner/Wpr1LocalPlanner" />
<param name= "controller_frequency" value="30" type="double"/>
</node>
</launch>
4.1 map_server
<!-- Run the map server -->
<node name="map_server" pkg="map_server" type="map_server" args="$(find wpr_simulation)/maps/309.yaml"/>
导入地图
4.2 AMCL
<!--- Run AMCL -->
<include file="$(find wpr1_tutorials)/nav_lidar/amcl_omni.launch" />
防碰撞
4.2.1 amcl_omni.launch
<launch>
<node pkg="amcl" type="amcl" name="amcl" output="screen">
<!-- Publish scans from best pose at a max of 10 Hz -->
<param name="odom_model_type" value="omni"/>
<param name="odom_alpha5" value="0.1"/>
<param name="transform_tolerance" value="0.2" />
<param name="gui_publish_rate" value="10.0"/>
<param name="laser_max_beams" value="30"/>
<param name="min_particles" value="100"/>
<param name="max_particles" value="1000"/>
<param name="kld_err" value="0.05"/>
<param name="kld_z" value="0.99"/>
<param name="odom_alpha1" value="0.2"/>
<param name="odom_alpha2" value="0.2"/>
<!-- translation std dev, m -->
<param name="odom_alpha3" value="0.8"/>
<param name="odom_alpha4" value="0.2"/>
<param name="laser_z_hit" value="0.5"/>
<param name="laser_z_short" value="0.05"/>
<param name="laser_z_max" value="0.05"/>
<param name="laser_z_rand" value="0.5"/>
<param name="laser_sigma_hit" value="0.2"/>
<param name="laser_lambda_short" value="0.1"/>
<param name="laser_lambda_short" value="0.1"/>
<param name="laser_model_type" value="likelihood_field"/>
<!-- <param name="laser_model_type" value="beam"/> -->
<param name="laser_likelihood_max_dist" value="2.0"/>
<param name="update_min_d" value="0.2"/>
<param name="update_min_a" value="0.5"/>
<param name="odom_frame_id" value="odom"/>
<param name="resample_interval" value="1"/>
<param name="transform_tolerance" value="0.1"/>
<param name="recovery_alpha_slow" value="0.0"/>
<param name="recovery_alpha_fast" value="0.0"/>
</node>
</launch>
一些参数的意义
Modify the content accordingly with your robot:
scan_topic (default: “kobuki/laser/scan”): indicates from which topic the laser data is obtained
base_frame_id (default: “base_link”): Indicates the name of the frame of the center of the mobile base.
odom_frame_id (default: “odom”): Indicates the name of the frame attached to the odometry system.
global_frame_id (default: “map”): Indicates the global frame of reference from which the robot will localize
4.3 move_base
<!--- Run Move_Base -->
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
<rosparam file="$(find wpr1_tutorials)/nav_lidar/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find wpr1_tutorials)/nav_lidar/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find wpr1_tutorials)/nav_lidar/local_costmap_params.yaml" command="load" />
<rosparam file="$(find wpr1_tutorials)/nav_lidar/global_costmap_params.yaml" command="load" />
<param name="base_global_planner" value="global_planner/GlobalPlanner" />
<param name="use_dijkstra" value="true"/>
<param name="base_local_planner" value="wpr1_local_planner/Wpr1LocalPlanner" />
<param name= "controller_frequency" value="30" type="double"/>
</node>
4.4rviz界面
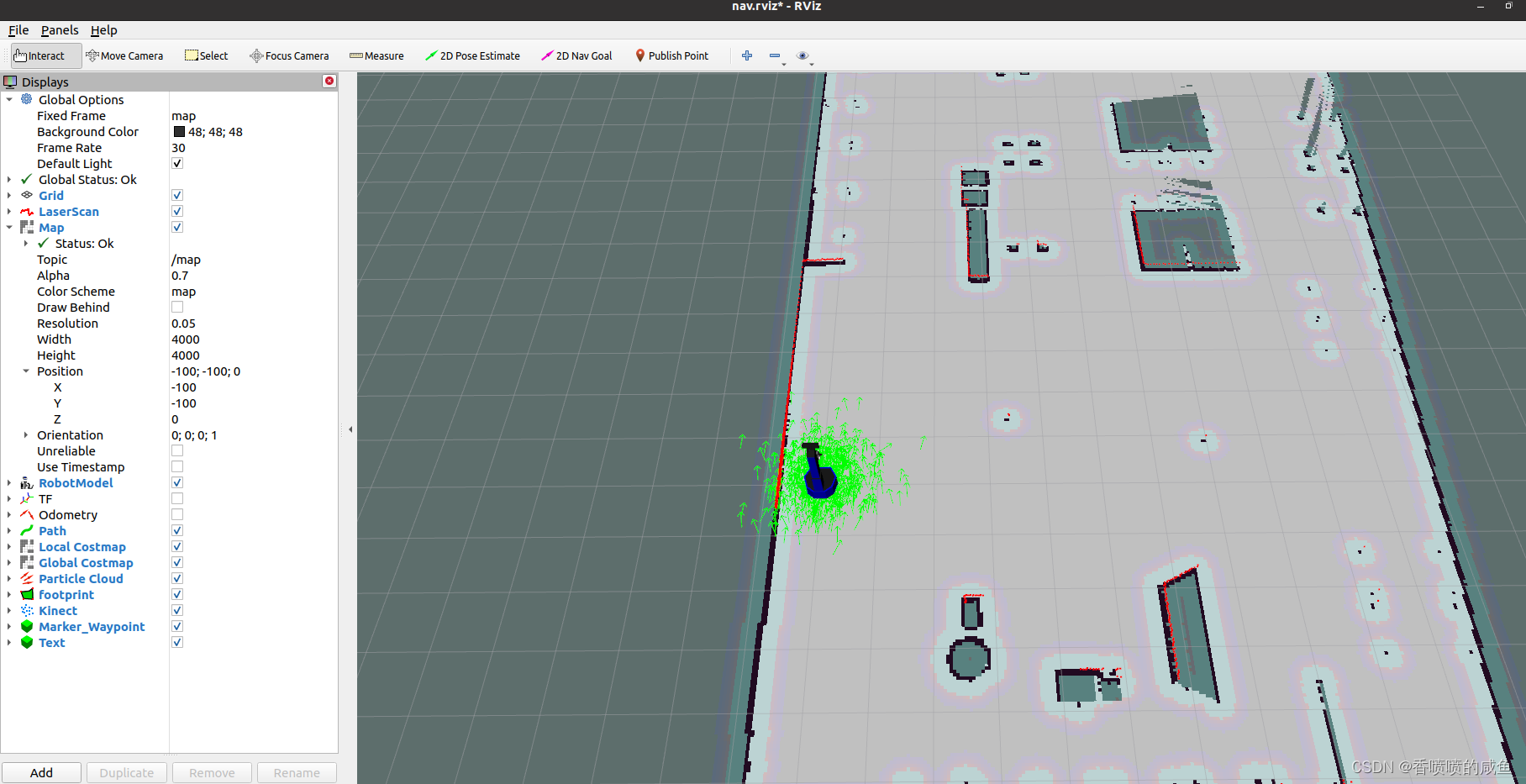
错误
1. gazebo就是加载不出来
命令行:
Waiting for service /gazebo/spawn_urdf_model
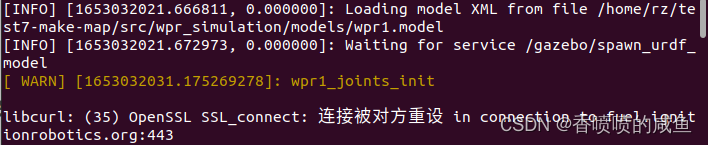
解决:尝试killall gzserver
2.启动后无法控制机器人
2.1
原来:
<!-- start world -->
<node name="gazebo" pkg="gazebo_ros" type="gazebo"
args="$(find a309_room)/worlds/a.world" respawn="false" output="screen" />
仿真环境的问题,将gazebo导入世界的程序改为:
<!-- start world -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(find a309_room)/worlds/a.world"/>
<arg name="paused" value="false"/>
<arg name="use_sim_time" value="true"/>
<arg name="gui" value="true"/>
<arg name="recording" value="false"/>
<arg name="debug" value="false"/>
</include>
就莫名其妙地可以了。hhhh,可能是有些参数,影响控制的部分。
2.2
原:在robots.launch中
<group ns="wpr1">
<!-- <param name="tf_prefix" value="robot1_tf" /> -->
<include file="$(find multiple_turtlebots_sim)/launch/one_robot.launch" >
<arg name="init_pose" value="-x 6.799 -y -6.955 -z 0" />
<arg name="robot_name" value="wpr1" />
</include>
</group>
group标签限制了工作空间,去掉group后,可以正常工作了,后期需要添加多机器人时,再填上即可。
现:
<!-- <param name="tf_prefix" value="robot1_tf" /> -->
<include file="$(find multiple_turtlebots_sim)/launch/one_robot.launch" >
<arg name="init_pose" value="-x 6.799 -y -6.955 -z 0" />
<arg name="robot_name" value="wpr1" />
</include>
修改前,控制的主题无法传送给gazebo,怀疑是控制的cpp文件的工作空间不同的问题。
keyboard_vel_ctrl.cpp是在默认的工作空间,而group后,修改了工作空间,后期控制多机器人再改,此处先留个尾巴。
修改后,即可控制机器人运动了。

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









