







汽车基本构造
汽车的第一大组成部分【发动机】
(一) 根据发动机所处位置的不同,汽车驱动的方式可分为四大类:(其中,FR是典型的驱动方式)
- FR:发动机前置后轮驱动(Front engine Rear drive)

- FF:发动机前置前轮驱动(Front engine Front drive)

- RR:发动机后置后轮驱动(Rear engine Rear drive)

- MR:发动机中置后轮驱动(Middle engine Rear drive)

- 4WD:四轮驱动(4 Wheel Drive)

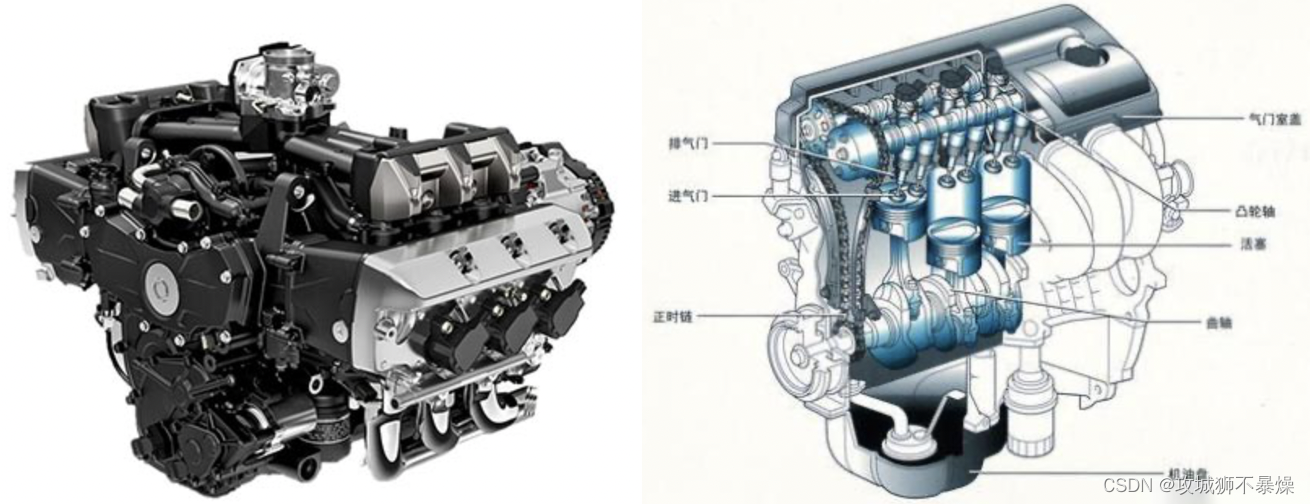
(二) 发动机有两个机构、五个系统组成。其中,
- 两个机构包括:曲柄连杆机构、配气机构
- 五个系统包括:燃油供给系统、点火系统、起动系统、冷却系统、润滑系统
汽车的第二大组成部分【车身】
承载式结构
车身和底架共同承担车辆所受压力。该结构整体性较强但承载力不强,一般应用在轿车、城市SUV等。

非承载式结构
该类结构中的车辆配有大梁,车身只用来承载人员与行李等,因此该结构具有较强的承载力,一般应用在越野车、货车等。

汽车的第三大组成部分【底盘】
传动系统
该系统主要包括 【离合器】、【变速器】、【万向传动装置】、以及 【驱动桥】。而:
- 万向传动装置主要包括 【万向节】 和 【传动轴】。
- 驱动桥主要包括 【主减速器】、【差速器】、【半轴】、以及 【桥壳】。
摩擦式离合器
离合器是直接与发动机相连的器件,其主动部件和从动部件之间不可采用刚性联系,应利用摩擦作用、液体介质或磁力来传递转矩。目前,汽车上广泛使用的是摩擦式离合器。

变速器
变速器解决了发动机转矩和转速变化范围较小、不可反转的限制。
传动比 = N 1 N 2 = T 2 T 1 ( N 为转速 , T 为齿轮数 , 1 代表主动齿轮 , 2 代表从动齿轮 ) 传动比 = \dfrac{N_1}{N_2} = \dfrac{T_2}{T_1}(N为转速, T为齿轮数, 1代表主动齿轮, 2代表从动齿轮) 传动比=N2N1=T1T2(N为转速,T为齿轮数,1代表主动齿轮,2代表从动齿轮)
按其传动比变化方式的不同,可分为有级式变速器与无级式变速器。
- 有级式变速器:采用齿轮传动,具有若干个定值传动比,应用最为广泛。同时,可进一步分为普通齿轮变速器与行星齿轮变速器,其中,普通齿轮变速器又有两轴式、三轴式、组合式之分。下面给出较典型的 三轴五档变速器 的结构图。


- 无级式变速器:CVT, Continuously Variable Transmission。即该类变速器的传动比是在一定范围内按无限多级变化,常见的形式有金属带式、电力式(ECVT)、液力式等。
万向传动装置
万向传动装置一般包括万向节与传动轴。其中,万向节是实现不同角度传动轴之间传递动力的装置。


驱动桥
驱动桥有 断开式驱动桥 与 非断开式驱动桥(整体式驱动桥) 两类。一般断开式驱动桥与独立式悬架配用,整体式驱动桥与非独立式悬架配用。
驱动桥主要包括主减速器、差速器、半轴与桥壳。其中,常见的对称式锥齿轮差速器的结构图如下所示,而半轴则是差速器与驱动轮之间传递动力的实心轴。



行驶系统
该系统主要包括 【车轮】、【悬架】、【车桥】、以及 【车架】。而:
- 车轮主要包括 【轮胎】 和 【轮毂】。
- 悬架主要包括 【弹性元件】、【导向装置】、以及 【减振器】。
悬架




转向系统
车辆的转向系统一般包括转向器与转向助力系统。而转向助力系统又可分为液压助力转向系统与电动助力转向系统。
目前转向系统的前沿技术有:
- 电控液压助力转向系统:ECHPS, Electrical Controlled Hydraulic Power Steering
- 电动液压助力转向系统:EHPS, Electronic Hydraulic Power Steering
- 前轮主动转向系统:AFS, Active Front Steering
- 线控转向:SBW, Steer By Wire
制动系统
车辆的制动系统一般包括制动器、制动助力系统以及制动力调节系统。而制动力调节系统主要有:
- ABS:制动防抱死系统(Antilock Brake System)。(当制动力大于附着力时,车轮将停止转动,在地面上做纯滑移运动,这种情况称为“抱死”。)
- EBD:电控制动力分配系统(Electronic Brake force Distribution)。EBD是ABS的辅助功能,是在ABS的控制计算机里增加一个控制软件,用来解决紧急制动时制动器与制动踏板的振噪感,其机械系统与ABS完全一致。
- ASR:汽车驱动防滑系统(Acceleration Slip Regulation)。ASR是ABS的延伸和补充。
- ESP:车身电子稳定系统(Electronic Stability Program)。ESP是ABS、ASR、EBD功能的综合与延伸,当车辆转向力不足时,ESP会额外对内侧车轮施加更多制动力,当车辆转向力过度时,ESP会额外对外侧车轮施加更多制动力。

汽车的第四大组成部分【电气设备】
电气设备包括电源、发动机启动系统以及汽车照明等用电设备,在强制点火的发动机中还包括发动机的点火系统。


















 1981
1981

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









