




 文章介绍了如何下载RealSenseSDK2.0并使用VS2022进行配置。在尝试运行示例代码时遇到错误LNK1104,无法打开文件realsense2.lib。解决方法是更新附加依赖库的路径到正确的位置。
文章介绍了如何下载RealSenseSDK2.0并使用VS2022进行配置。在尝试运行示例代码时遇到错误LNK1104,无法打开文件realsense2.lib。解决方法是更新附加依赖库的路径到正确的位置。
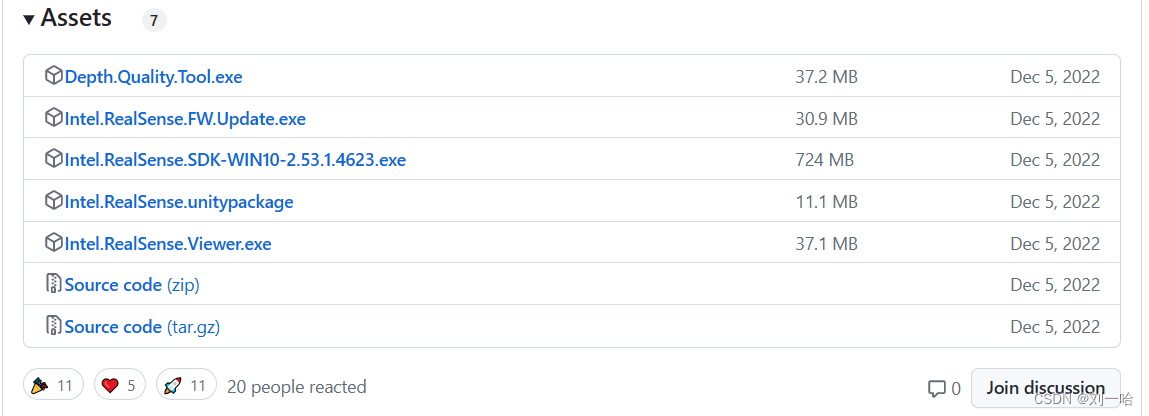
1、下载RealSense SDK 2.0
进入github下载并安装所需的SDK
下载链接
2、VS2022调用
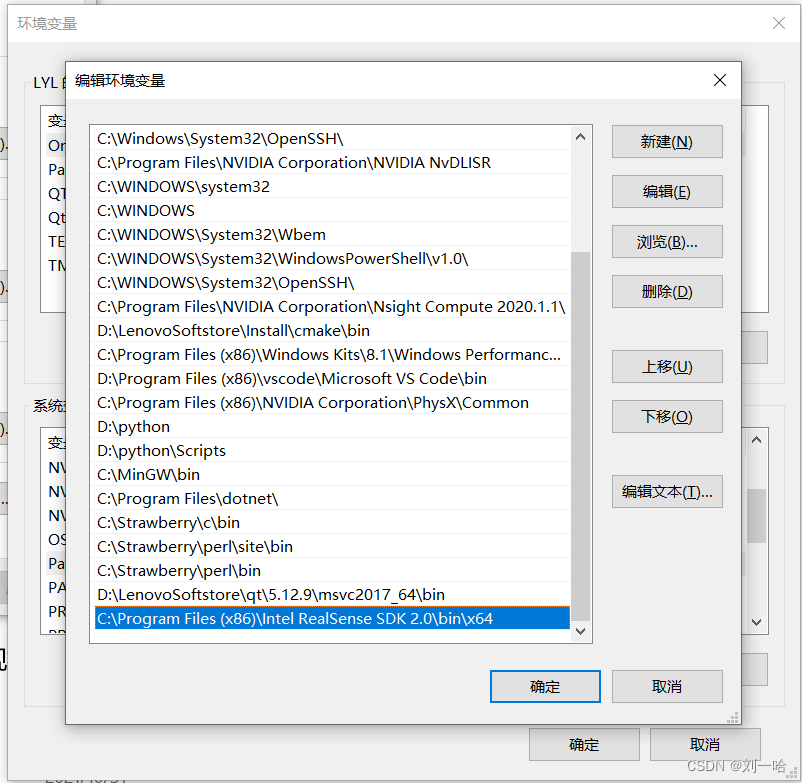
添加系统环境变量
vs环境配置
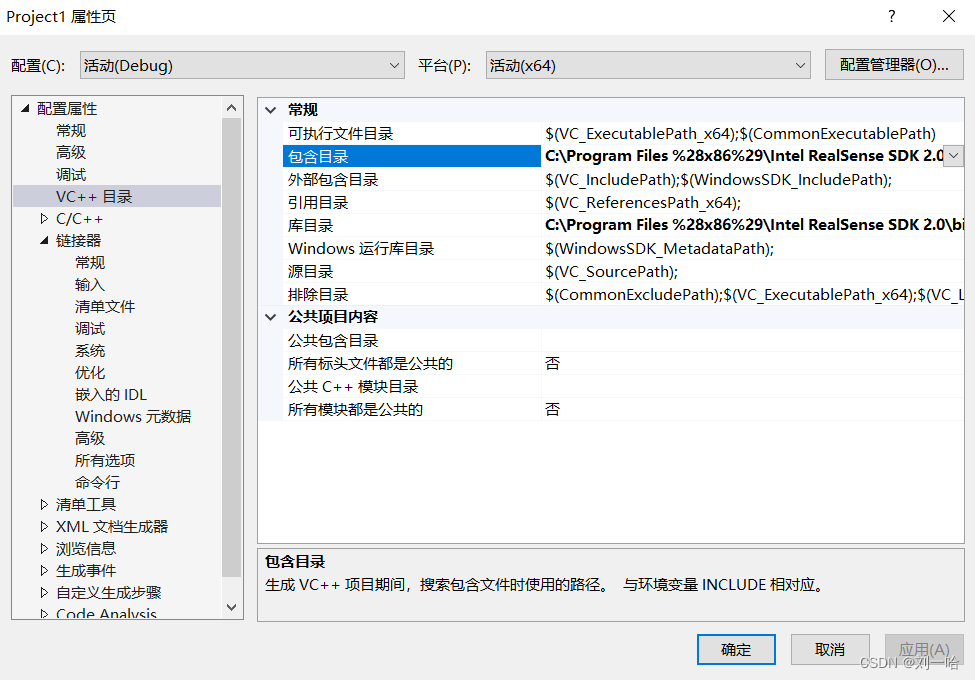
包含目录添加:
C:\Program Files %28x86%29\Intel RealSense SDK 2.0\include
C:\Program Files %28x86%29\Intel RealSense SDK 2.0\samples
库目录添加:
C:\Program Files %28x86%29\Intel RealSense SDK 2.0\bin\x64
附加依赖库添加:realsense2.lib
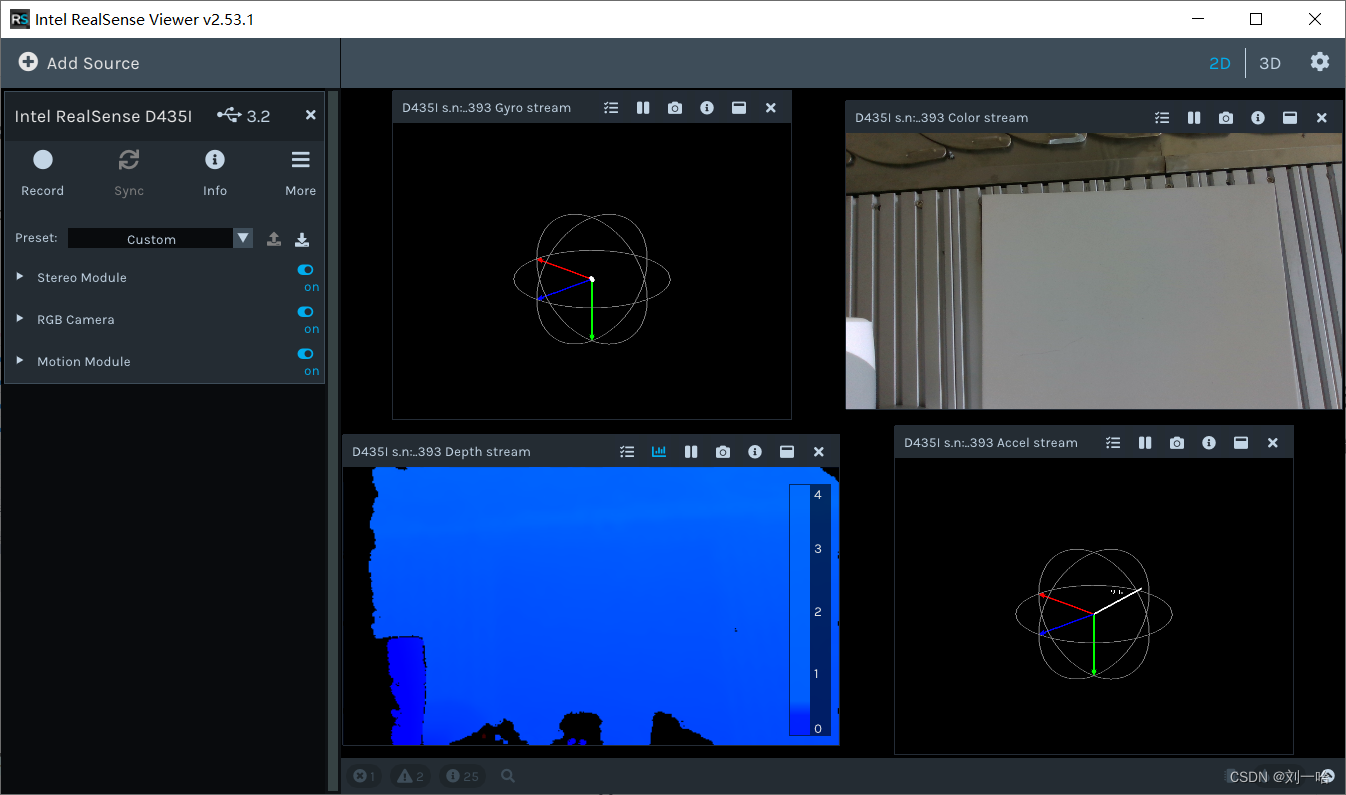
运行
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2742
2742




 到【灌水乐园】发言
到【灌水乐园】发言







