







 超级会员免费看
超级会员免费看
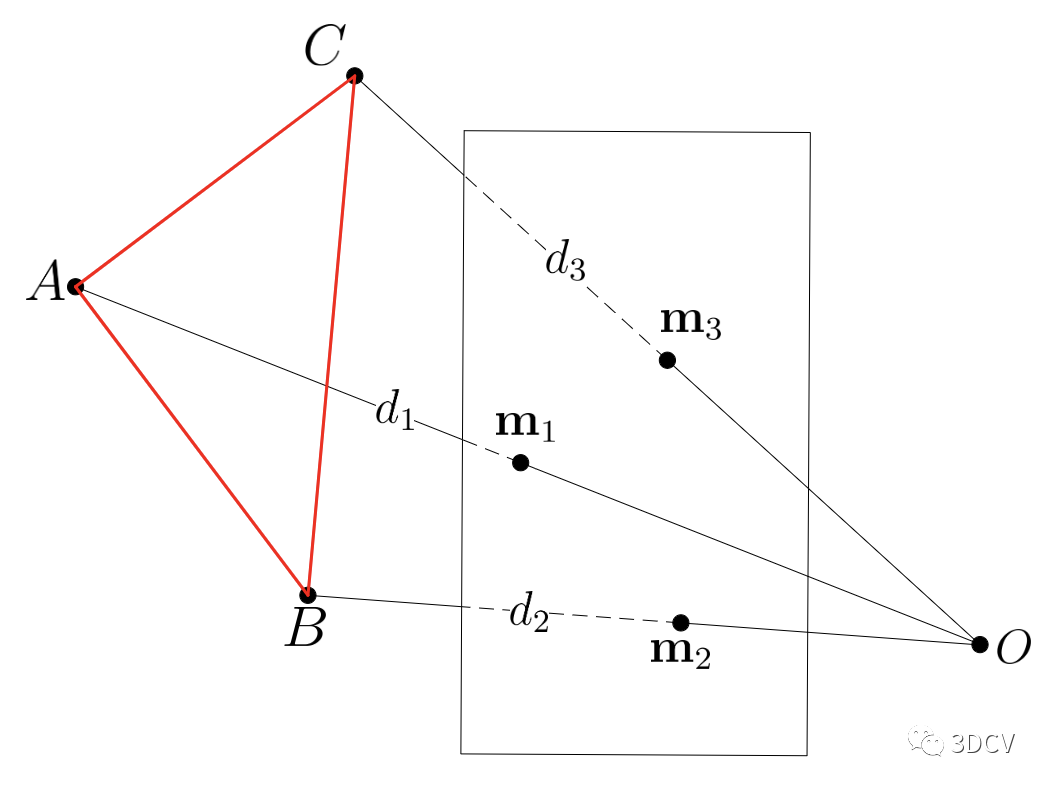
图1:P3P问题
作者:Vallee | 来源:3DCV
在公众号「3D视觉工坊」后台,回复「原论文」即可获取pdf和代码。
添加微信:dddvisiona,备注:3D点云,拉你入群。文末附行业细分群。
P3P 问题是经典的多视图几何问题之一,其中标定的相机的绝对位姿由三个 2D-3D 对应关系决定。由于这是许多视觉系统的关键(例如定位和SfM),因此过去有很多研究关注于如何开发更快、更稳定的P3P算法。虽然当前SOTA的求解器既非常快又稳定,但仍然存在可能崩溃的配置。本文将问题代数化为寻找两个圆锥的交点。通过这个方式,我们能够分析表征多项式系统的实根,并为每个问题实例采用量身定制的解决方案。这导出了一个快速稳定的P3P求解器,它能够正确解决其它方法可能会失败的情况。实验评估表明,该方法在速度和成功率方面都优于当前的SOTA方法。
1 什么是P3P问题
PnP是指根据2D-3D对应关系集合估计相机绝对位姿,集合最小的情况是P3P问题。P3P是将2D-3D对应关系通过相机内参转换为3D-3D对应关系进行求解。给定世界坐标系中的3个3D点以及它们对应的归一化图像点,两个点集通过刚体变换关联:
其中是某个正数。P3P的目标是求解其中的旋转和平移。
2 P3P问题发展史
P3P作为一个几何问题历史悠久,比计算机视觉领域

 订阅专栏 解锁全文
订阅专栏 解锁全文
















 5915
5915











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









