







 超级会员免费看
超级会员免费看
摘要
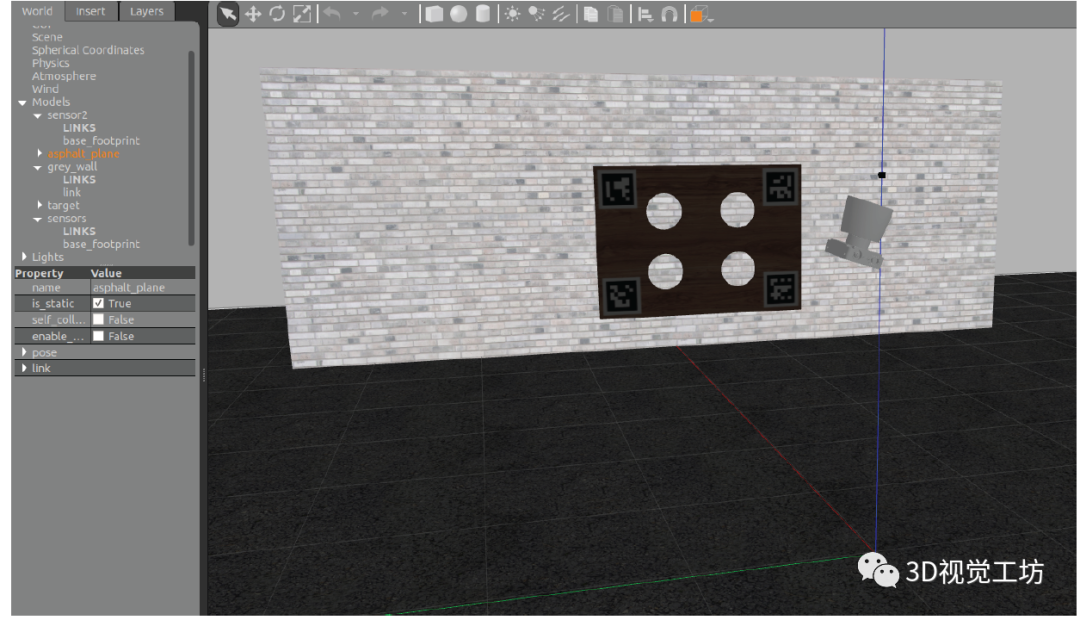
在车端配置一个双目相机再加上一个激光雷达已经成为一种比较常用的配置。但是为了融合相机和激光数据我们需要一个复杂的标定过程。本文提供了一种不需要人干预的自动化的双目和激光雷达的外参估计方法。本文的标定方法是克服在自动驾驶车辆中的传感器的常见的限制,如低分辨率和特殊的传感器的位置(如你在车端在没有升降台的情况下不能让车上下动,roll,pitch旋转)。为了证明算法的可行性,作者分别在仿真和真实环境中做的实验都表现出了比较好的结果。
代码地址:在公众号「计算机视觉工坊」,后台回复「车端激光」,即可直接下载。
一、介绍
高级驾驶辅助系统(ASAS, Advanced Driver Assistance Systems)或者是自动驾驶的系统需要准确的环境感知来正确的进行路径规划,在可能影响驾驶方法的情况下(例如光照的变化),这些系统必需要有一定程度的鲁棒性。因此车端配置的传感器需要可以在不同的情况下互补。视觉系统可以提供场景的外观信息,所以在车端系统中很常见。双目视觉能提供一定范围内的场景的深度信息,所以作为一种经济高效的传感器,可以提供车周围一定范围内稠密的点云信息。而激光雷达的特点是测量精度高(测量飞行时间,根据点的线束和角度信息投影到空间坐标系),而且可以提供360度范围内的点云信息。(但是相机的深度信息毕竟不准确,但是分辨率高&#

 订阅专栏 解锁全文
订阅专栏 解锁全文
















 2120
2120











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









