







AGV车调试随手记(五、六)——型号:MIR250
1.WiFi设置不佳的症状
糟糕的WiFi设置会对MiR机器人的性能产生负面影响。
(1)WiFi设置不佳的明显迹象
一个糟糕的WiFi设置会影响任何依赖WiFi接收命令的MiR机器人的性能。当你使用《MiR Fleet》时,对良好WiFi设置的需求就更加明显了,因为这需要通过WiFi进行多层通信来协调连接的机器人。以下是糟糕的WiFi设置的五大症状:
①用户与机队或机器人之间的延迟。你可能会注意到,有时机器人需要更长的时间来开始执行任务。
②与机器人或舰队接口的连接不可靠。如果你有一个困难的时间连接或浏览机器人或舰队界面,这可能是因为你有一个糟糕的连接到机器人或MiR舰队服务器。
③机器人与和平号舰队之间的连接不可靠,同步缓慢。当一个机器人在MiR舰队界面中的状态是断开的,或者它在活动地图上的运动是跳跃的,你可以告诉它什么时候没有连接到舰队。
④MiR舰队资源管理缓慢。机器人等待时间超过必要的可用舰队资源是无法得到的信息,他们可以从和平号舰队获得资源。
⑤缓慢的机器人之间的碰撞避免协调连接到和平号舰队。足迹较大的机器人可能会开始与舰队中的其他机器人发生碰撞,因为MiR舰队通过WiFi连接接收或发送位置信息的速度不够快。
2.自动充电和自动分期
自动充电和自动分段保持所有机器人充电和连接舰队。
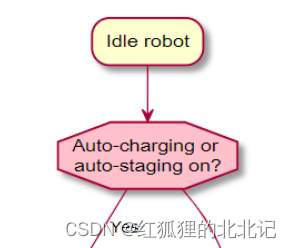
(1)MiR舰队处理闲置的机器人。当一个机器人空闲时,一个包含机器人信息的消息被发送到车队中负责管理充电和分段的部分。如果自动充电、自动暂存或两者同时启用,则充电暂存系统会持续评估如何处理闲置机器人。
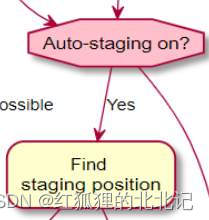
(2)汽车分期。如果只启用自动暂存,充电和暂存系统将试图找到一个可用的暂存位置分配给空闲的机器人。如果机器人不能登台,机器人将在当前位置闲置。因此,重要的是要确保一个站点至少具有与机器人数量相同的分期位置数量。
(3)汽车充电。如果只启用自动充电,充电和分期系统将尝试为机器人寻找一个可用的充电站。如果无法实现,系统将尝试寻找一个已占用的充电站,在充电站中充电机器人可以与空闲的机器人进行交换。如果两种选择都不可能,机器人将继续闲置在当前的位置。重要的是要确保站点的分期位置数量至少与机器人的数量相同。
(4)自动充电和自动分期。如果使能自动充电和自动暂存,充电暂存系统会首先为机器人寻找一个可用的充电站,如果没有可用的充电站,则会尝试将空闲的机器人与占用充电站的机器人进行交换。如果这是不可能的,系统将最终尝试送机器人到一个分期位置。如果这些选项都不可行,机器人就会在当前位置闲置。
3.充电和分期系统是如何工作的?
自动充电和自动分段过程将在机器人空闲数秒(可能由用户定义)后启动。机器人在进入充电站或分段位置前必须处于空闲状态的默认时间为0.25分钟或15秒。该值可在“系统>设置>充电和暂存>空闲时间”中修改。
空闲时间值以分钟为单位,这意味着值0.25和1分别对应15秒和60秒。
(1)STEP1:充电和暂存系统首先检查用户是否启用了自动充电或自动暂存,或者两者都启用了。
(2)STEP2:如果自动充电和自动暂存启用了其中一个或两个,它将继续检查自动充电是否设置为True。
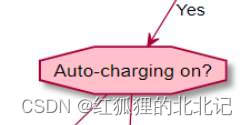
(3)STEP3:如果自动充电开启,充电分期系统会尝试寻找充电站,或者将正在充电的机器人与闲置的机器人进行交换。

(4)STEP4:如果以上都不是可能的操作,收费和暂存系统检查是否启用了自动暂存,如果启用,它会尝试寻找一个可用的暂存位置。
(5)STEP5a:如果不能完成上述任何一个动作,则充电和分段系统将会将空闲的机器人留在当前的位置。
(6)STEP5b:如果不能完成上述任何一个动作,则充电和分段系统将会将空闲的机器人留在当前的位置。
(7)逻辑图
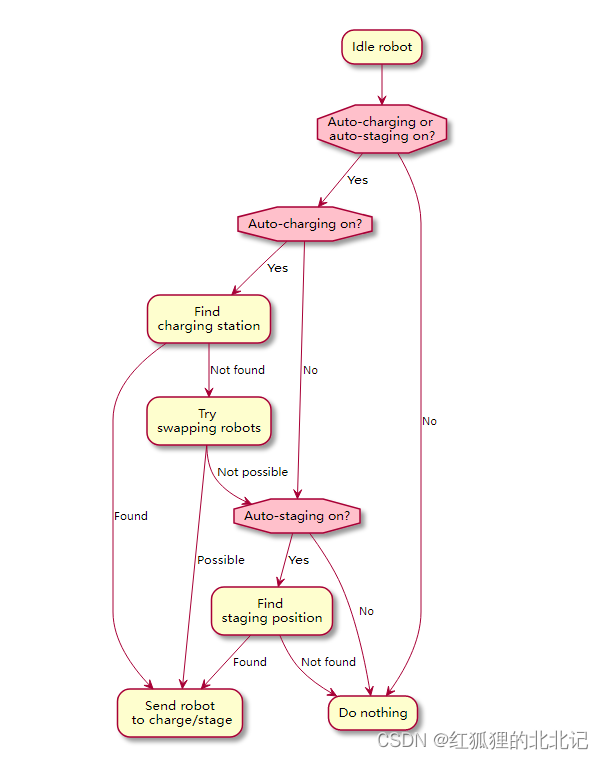
这张图展示了充电和分期系统在处理闲置机器人时的工作流程。注意,这个图没有考虑下面介绍的所有收费和分期参数。
4.MiR舰队怎么知道什么时候给机器人充电?
你可能想知道车队如何决定一个机器人是否必须被送到充电站或从充电站释放。嗯,这可以通过舰队用户在舰队界面中设置的一系列参数简单定义:
(1)把机器人送到充电站
如果机器人的电池电量百分比低于车队用户在“最小充电电池百分比”中设置的数值,则车队可以将机器人送到充电站。机器人将停留在充电器中,直到满足以下两个条件中的至少一个:一个新的任务被安排,机器人在正确的组中,并且有足够的电池百分比来完成这个任务。另一个机器人需要使用充电站,并且在充电站的机器人在电池最小百分比和在充电站释放的最小时间以上。
(2)从充电站释放机器人
当车队确定需要更换充电机器人时,车队会首先检查:如果机器人满足上述两个条件之一。如果机器人充电的时间超过了在充电站的最短时间,机器人收到新的任务。“最小充电站停留时间”由用户自行设置。
5.充电和分期界面设置
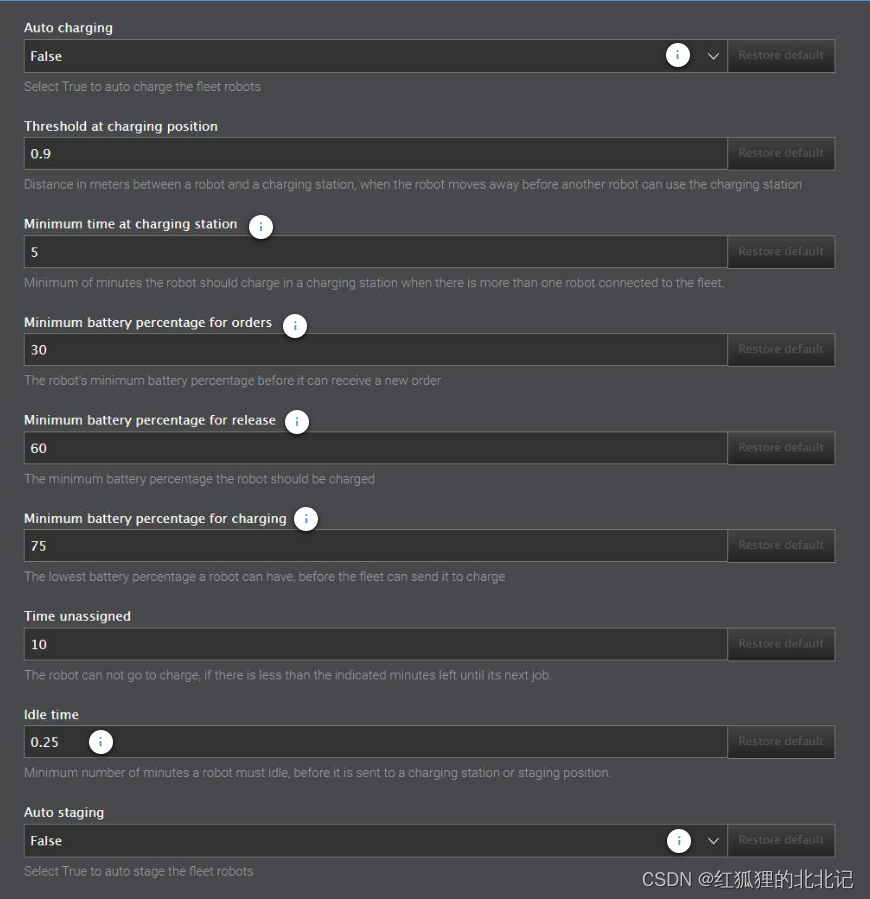 (1)Auto charging:这里用户启用(True)或禁用(False)自动充电。自动充电是和平号舰队决定何时将机器人送到充电站,何时将机器人从充电站释放的能力。
(1)Auto charging:这里用户启用(True)或禁用(False)自动充电。自动充电是和平号舰队决定何时将机器人送到充电站,何时将机器人从充电站释放的能力。
(2)Threshold at charging position:
(3)Minimum time at charging station:在这里,用户设置了机器人需要分配到充电站的最短时间,然后它可以与另一个机器人交换充电。充电站运行时间默认为5分钟。
(4)Minimum battery percentage for orders:在这里,用户可以设定机器人在仍能被指令时的最低电池电量百分比。即使电池电量低于设定的电池电量百分比,机器人也可以执行任务,但当任务完成后,机器人不能再执行任何任务,直到电池电量再次高于设定的电池电量百分比。该百分比默认为30%。
(5)Minimum battery percentage for release:用户可以在这里设置机器人从充电站释放之前必须拥有的最小电池百分比。这个百分比规定了机器人的电池必须充电到多少,机器人才能接受新的任务,被送到补给位置,或从充电站释放。默认为60%。
(6)Minimum battery percentage for charging:在这里,用户定义了机器人的电池电量可以低到什么程度,然后MiR舰队就可以把机器人送到充电站充电。该百分比默认为75%。
(7)Time unassigned:
(8)Idle time:在这里,用户可以设置机器人必须闲置的最短时间,然后车队可以将机器人送到充电站或分期位置。这一时间并不影响机器人何时可以接受和平号舰队的任务。注意,空闲时间值是以分钟为单位给出的,这意味着值0.25和1分别对应于15秒和60秒。空闲时间默认设置为15秒(0.25分钟)。
(9)Auto staging:在这里,用户启用(True)或禁用(False)自动分段。自动分期是和平号舰队决定何时可以将机器人送到分期位置的能力。
6.资源处理
MiR舰队负责处理与舰队相连的机器人之间共享的资源。
(1)MiR舰队处理舰队机器人之间共享的资源:
①所有类型的位置和标记(例如机器人、分期和进入位置)。
②Limit-robots区。
一个位置在任何时候只能分配给一个机器人。然而,一个位置可以容纳多少机器人是没有限制的。
适用于所有机器人的机器人位置:
机器人等待被分配任务的位置:
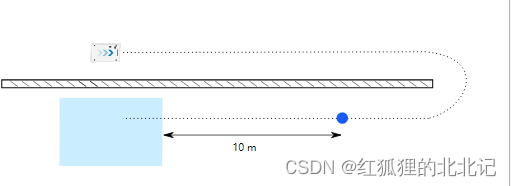
(2)分配一个机器人到一个位置
如果机器人满足以下所有条件,就可以分配到一个位置:
①这个位置没有分配给另一个机器人。
②位置是机器人当前驱动动作的目标。
③该位置在机器人的全球平面中心10米内。
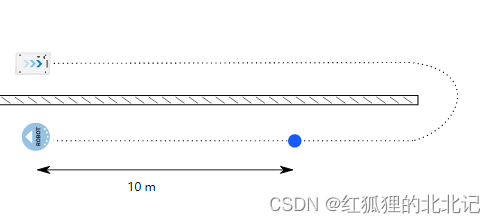
在10米的追索权范围内,机器人可以被分配到该位置。
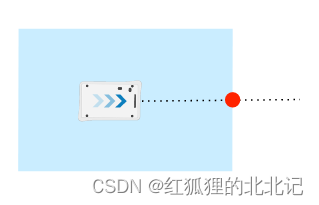
(3)将机器人从一个位置释放出来
机器人可以从一个位置释放如果同时满足以下两个条件:
①机器人正在遵循一个新的计划,目标不再是分配的位置资源。②位置中心到机器人中心的距离为1米以上。
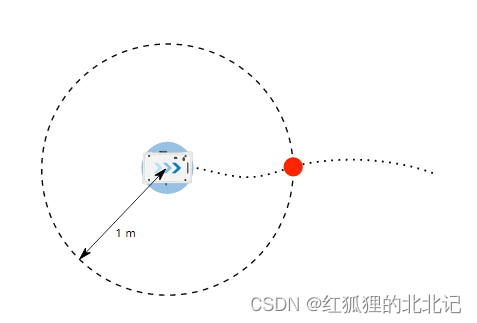
当机器人的中心距离位置中心超过1 m时,位置被释放。
(4)标记
每个标记都有一个进入位置。这个进入位置和其他位置一样由舰队处理。
(5)Limit-robots区
在“限制机器人区域”中允许的最大机器人数量,也就是其最大容量,是由用户在创建该区域时设置的。在“限制机器人区”可以排队的机器人数量没有限制。
(6)将一个机器人分配到一个极限机器人区域
如果满足以下所有条件,机器人就可以被分配到一个Limit-robots区域:
①分配到该区域的机器人数量少于该区域的最大容量。
②机器人的平面与区域的边缘相交。
③在机器人的平面图上,这个十字路口距离机器人的中心不到10米。
当机器人的中心到达距离区域边缘10米的平面上的一个点时,机器人可以被分配到一个极限机器人区域。
(7)将机器人从极限机器人区释放出来
当机器人的中心在离开限制区的过程中穿过限制区的边缘时,机器人就被从限制区释放出来。
当机器人的中心到达区域的边缘时,机器人就从这个区域释放出来。
7.导入导出站点文件
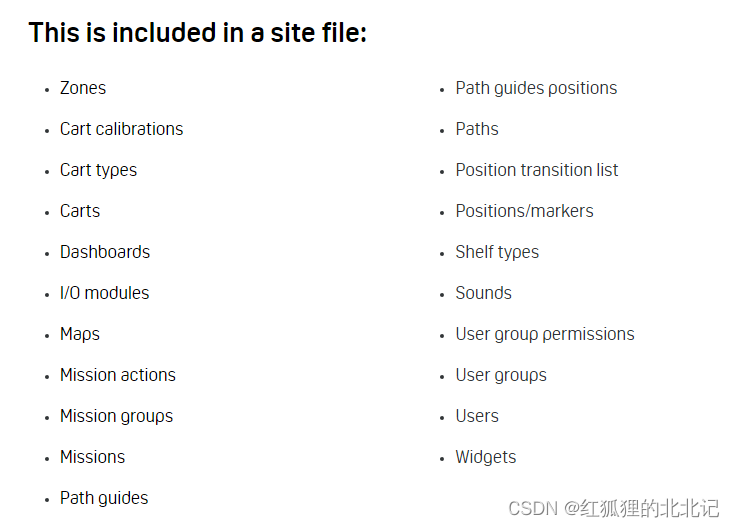
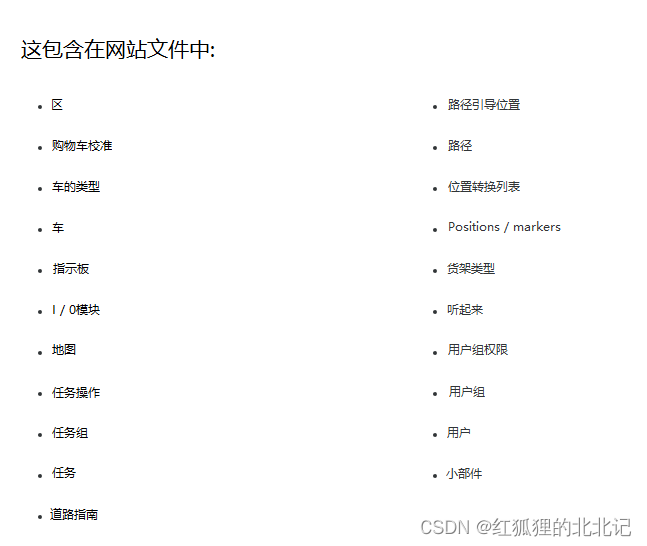
站点文件是站点中常用数据的集合。
(1)网站文件介绍
站点文件是站点中常用数据的集合。当需要备份设置时,或者当需要将数据从一个车队或机器人传输到另一个车队或机器人时,可以从车队或机器人导入或导出它。

(2)网站文件是如何分发的?
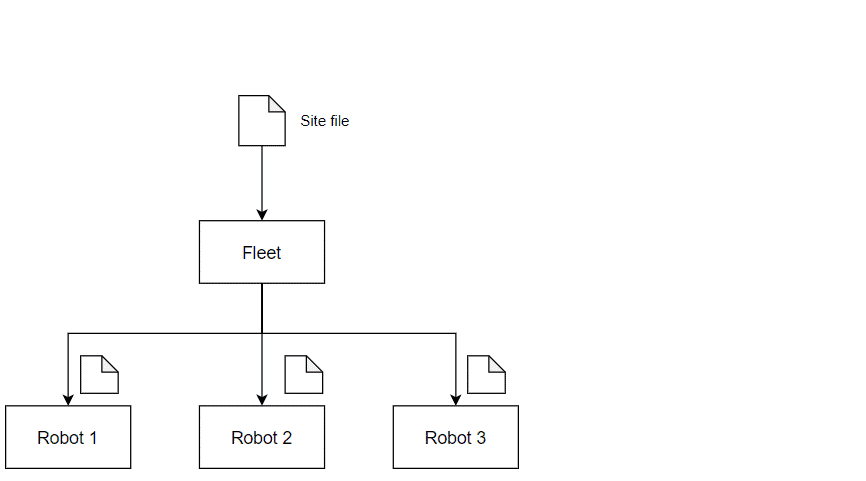
当舰队检索到站点文件时,它会将其内容分发给连接的机器人。参见下面的图表。
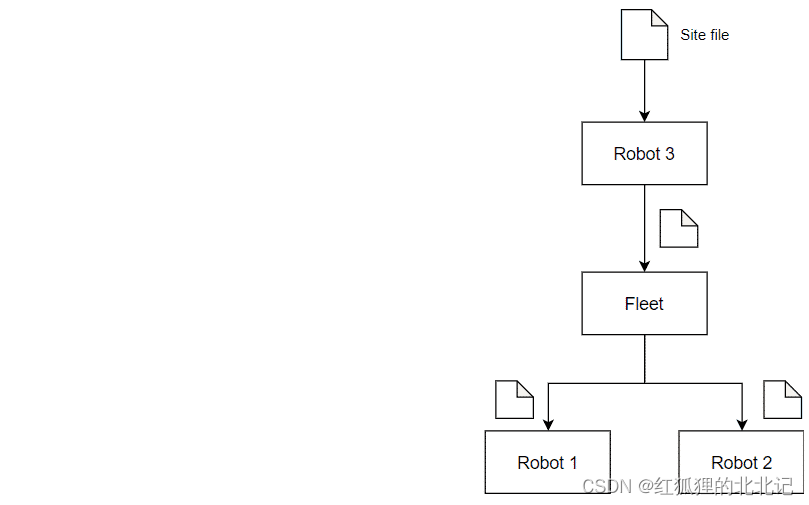
如果将网站文件上传到机器人,MiR舰队会从机器人那里获取文件,并将其分发给所有其他连接机器人。下图说明了这一点。
(3)导入、导出站点文件
①Importing a site file:从车队或机器人导出的站点文件可以同时被车队和机器人导入。如果机器人连接到一个舰队,MiR建议您使用舰队导入和设置网站文件。
②Exporting a site file:导出站点文件时,车队或机器人从数据库收集所需的数据,并将其打包到一个加密的站点文件中。
(4)何时以及如何激活站点文件?
在启动时,舰队装载的位置,区域,和任务的active站点。因此,如果创建了一个新站点或将其导入到舰队中,那么激活是必要的。
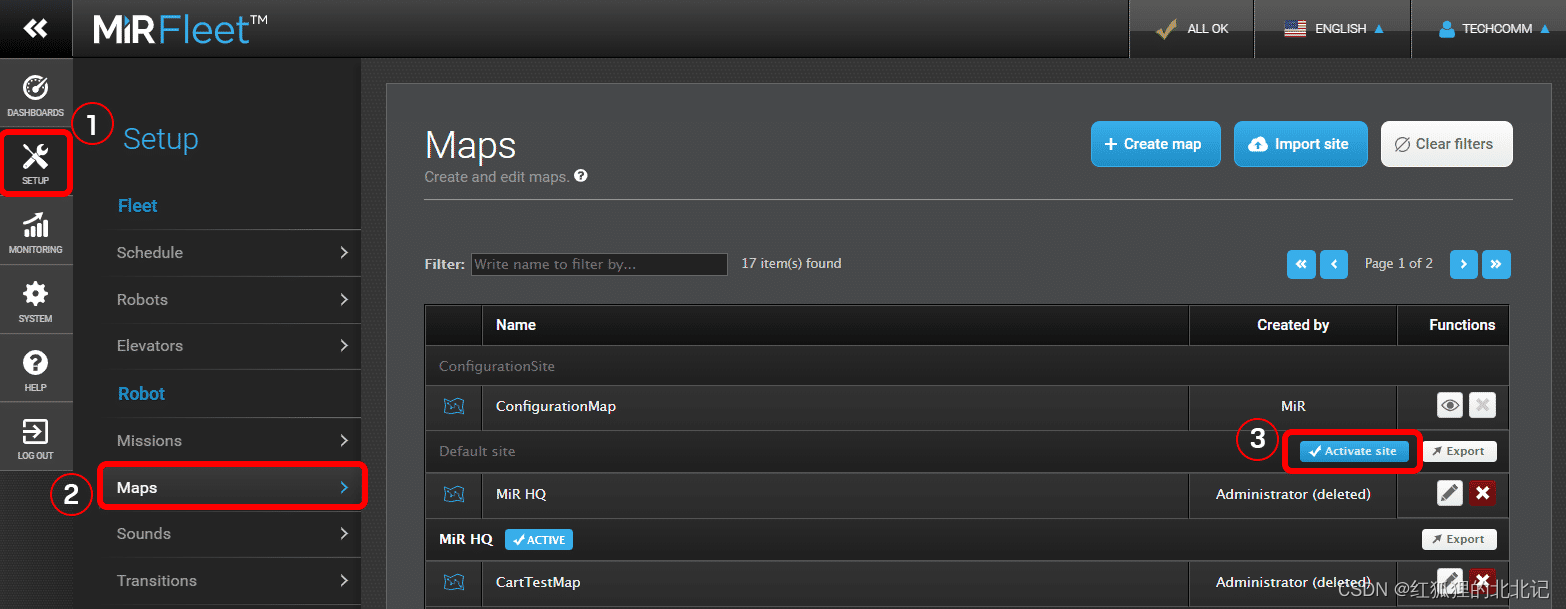
当您想激活一个站点时,请转到Setup > Maps并选择activate site。
舰队然后重新启动,给定站点文件中的资源将从数据库加载。这意味着舰队将在短时间内无法运转,通常不到60秒。
8.Synchronization(同步)
“和平号舰队”负责在自身和连接到它的所有机器人之间同步数据。
(1)舰队同步什么?
这些数据在舰队和机器人之间同步。

(2)舰队什么时候同步?
①当舰队检测到变化时:舰队和机器人的数据库有一个专门用于更改的表。必须同步的任何更改都记录在该表中。舰队将连续每秒钟读取一次数据库中的这些表。
②当一个机器人加入时:舰队也将同步每当一个新的机器人加入舰队。当检测到更改时,舰队将在整个舰队及其机器人中更新更改后的数据。

(3)舰队是如何同步的?
①数据的变化:如果舰队检测到相关数据发生变化,它将试图合并舰队和机器人之间的数据。如果由于相互冲突的更改而无法进行合并,则舰队上的数据将覆盖机器人的数据。

②全局唯一标识符:同步的数据都有全局唯一标识符(GUID), GUID是在数据创建时创建的。在同步时,车队使用这些guid来识别要更改的数据。这意味着具有相同名称的两个对象(可能是两个位置)不会中断同步,因为它们的惟一标识符不相同。
③同步场景:当机队进行数据同步时,可能会出现不同的场景:1. 机器人是空的,舰队有数据。2. 机器人有数据,舰队空无一人。3.机器人有数据,舰队也有数据。
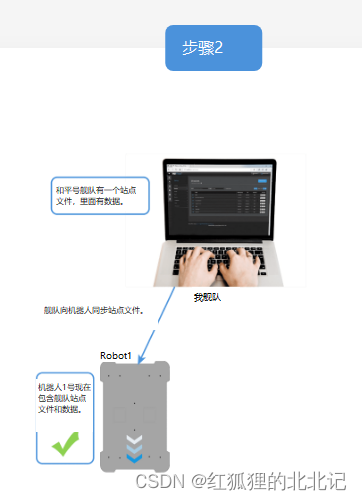
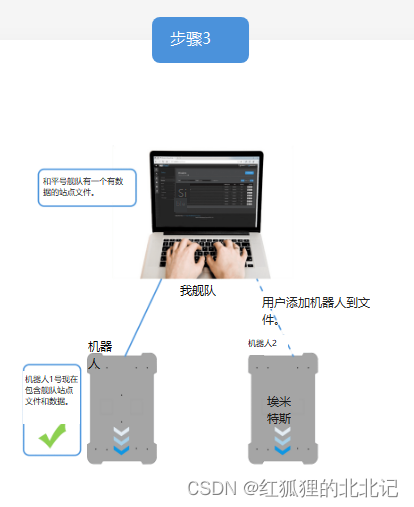
(4)场景1:机器人是空的,舰队有数据。
你有一个包含一些数据的舰队,而且还没有机器人连接。现在,你想添加两个机器人。所有机器人都不包含任何用于同步的数据。这些步骤显示同步的顺序。


















 2460
2460











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











