






1.首先录制包含GPS和你跑代码所需的话题的bag包
2.下载rviz_satellite,这个可以将将GPS在在卫星地图显示.
ROS下如何将GPS数据在卫星地图显示(两种开源方法)_zllz0907的博客-CSDN博客按照此链接操作即可
3.自己创建一个做ICP轨迹对齐的工作空间,并将Extrac_traje.cpp放入自己的工作空间进编译:如图是我自己的编译空间,文件路径是combination_ws/lidar_gps_alig /Extrac_traje.cpp

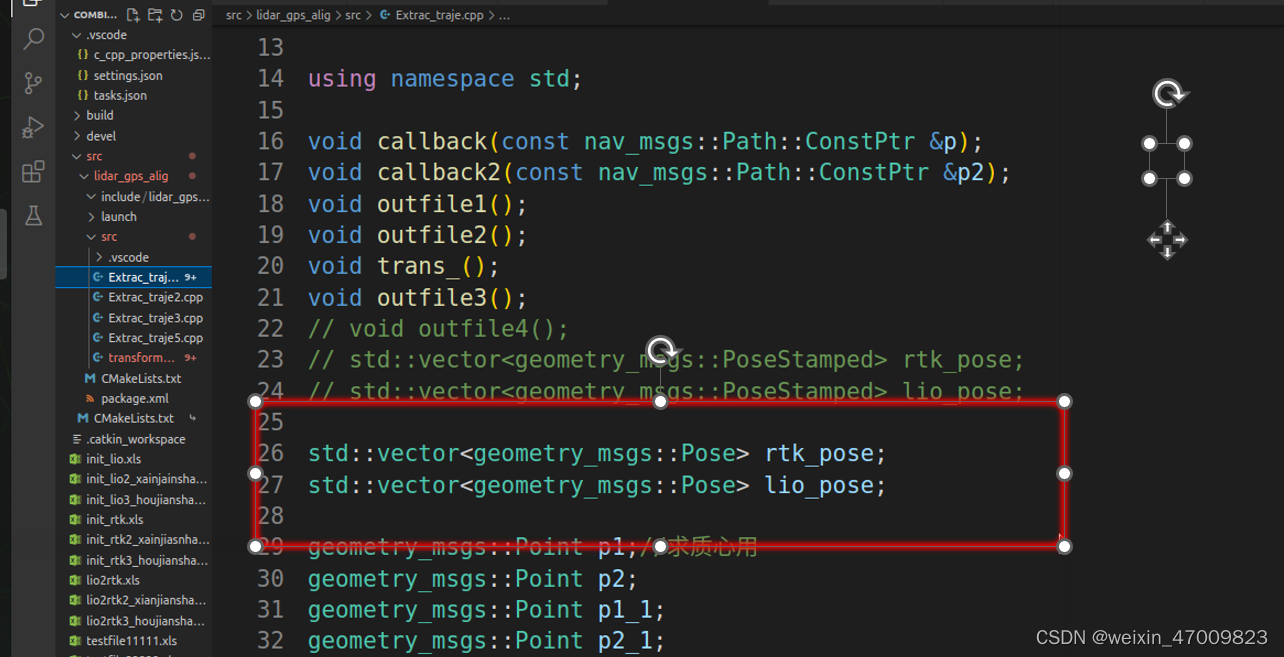
4.编译成功之后,需要根据你自己的需求改代码中的容器名,话题名和生成的文件名.以lio_sam和GPS为例.如图
(1)把容器名改成方便你自己识别的
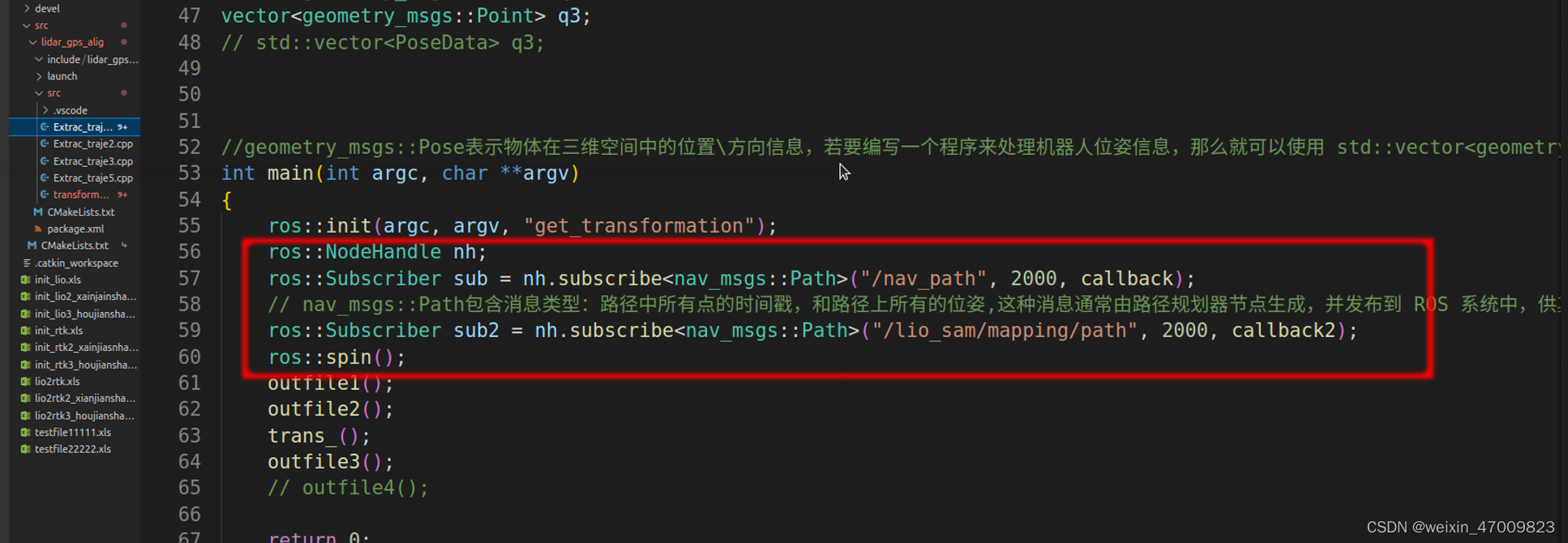
(2)把订阅的路径话题改成你自己的
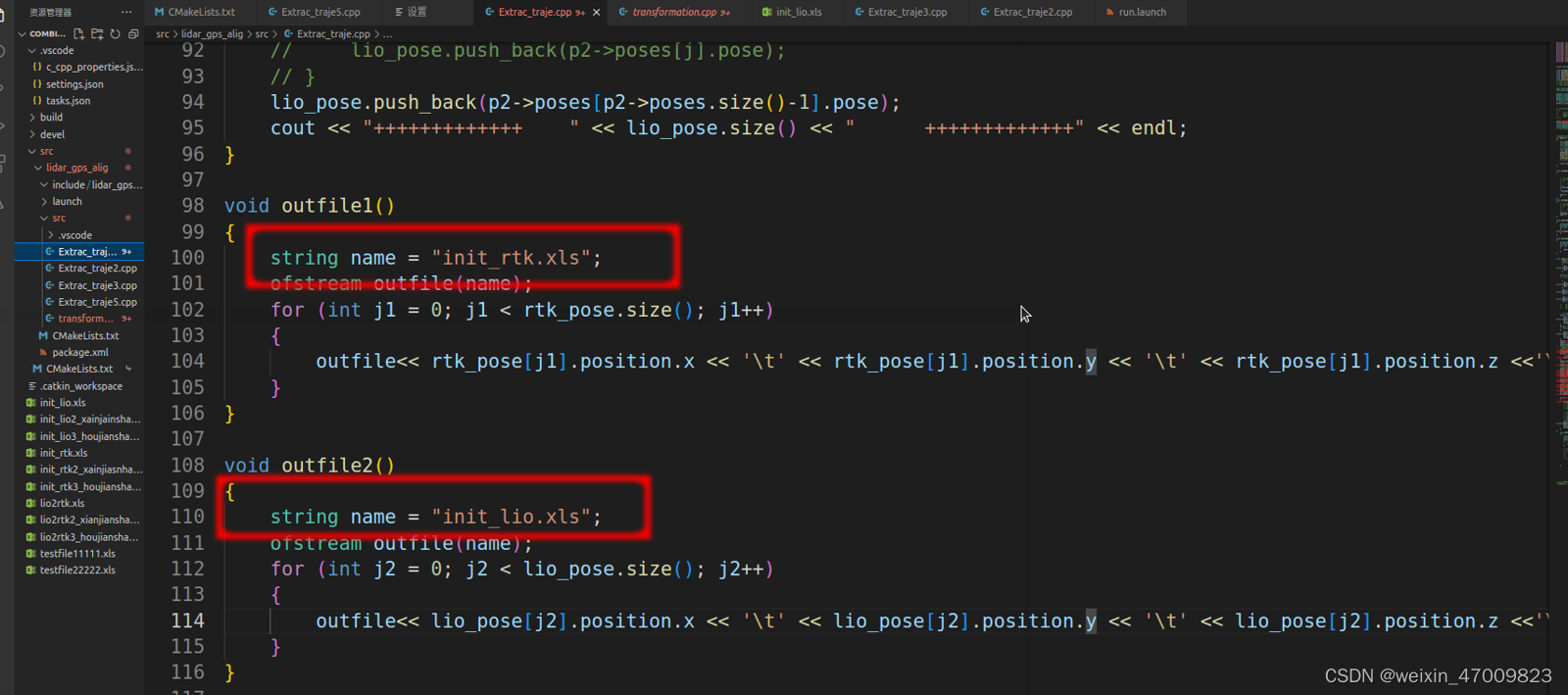
 (3)把生成的文件名也改成自己易于自己需要的
(3)把生成的文件名也改成自己易于自己需要的

5.要用evo做轨迹评估,还需要时间戳和四元数信息,但是这个cpp文件里还没有写入这部分代码读懂代码,自己还需要什么信息进行补充修改,根据图中所示获取位置信息作为参考,做相应的修改补充以得到时间戳,位置,四元数信息

6.代码修改完之后重新编译,将其调试成功
7.代码没问题之后,按以下步骤依次执行,最终可以得到后期做EVO轨迹评估所需要的数据信息
打开lio-sam包-->打开gps在卫星地图显示的功能包-->执行icp对齐的代码-->播放bag包(按照顺序依次执行)

8.得到相应的数据便可以去用EVO做轨迹评估
9.补充,如果需要查看路径点的点云可视化信息,可以参考以下python脚本

https://t0.tianditu.gov.cn/img_c/wmts?tk10d8b711c8297e3fb6042ad83d7c051c















 561
561











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









