







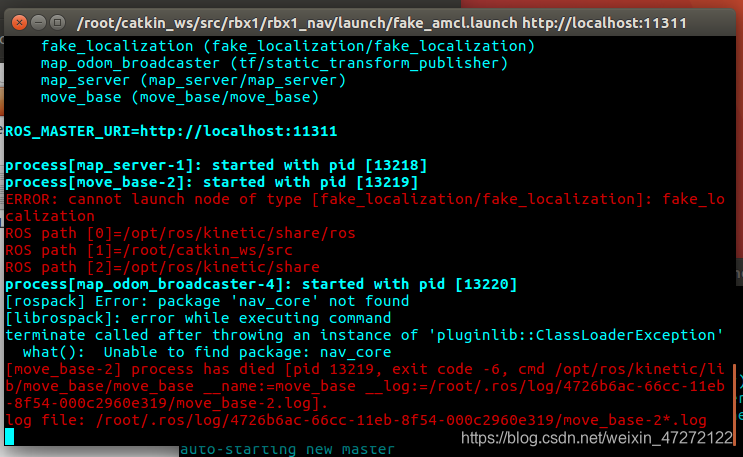
无法启动节点, 是因为缺少ros的功能包 ,把缺少的安装即可
sudo apt-get install ros-kinetic-fake-localization
缺什么就把后面map-server换成什么。
无法启动节点, 是因为缺少ros的功能包 ,把缺少的安装即可
sudo apt-get install ros-kinetic-fake-localization
缺什么就把后面map-server换成什么。
 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言























