







写在最前: 本人点云小白,本文是个人笔记,仅作参考,有哪里不对的地方还请多多指正,会虚心接受指教。
主成分分析(PCA)
1.作用
PCA用于找到某一坐标系,使得点云在坐标系下的投影数据最多,即:降维后尽可能小的减少数据损失。
由上述介绍可知:PCA可以应用在数据降维、压缩等方面。
2.操作步骤
计算PCA的流程如下:
计算PCA前需要了解一些知识 (主要是第四条),此处指路b站: 用最直观的方式告诉你:什么是主成分分析PCA 介绍的很详细:
- D’=RSD
其中,D’是拉伸旋转后的点云数据,S是拉伸矩阵 S=ST ,R是旋转矩阵 R-1=RT。我们希望拉伸旋转后的点云数据在坐标轴上的投影数据损失最小。 - 协方差矩阵C= DDT/(n-1)
- 奇异值分解(SVD):将一个矩阵分解为三个矩阵的乘积,即:M=ULVT。
其中,V是MTM的特征向量,U是MMT的特征向量,L是MMT或者MTM的奇异值(也就是特征值开根号)。 - SVD与PCA的关系:V=R。由此可知,计算R时,可以不必求原始数据D的协方差矩阵,而通过计算DTD的特征向量、特征值求得R、S,大大减少了计算量。注意:特征向量相同,特征值差n-1倍。(此处我感觉是这样,由线代矩阵扩大k倍,特征值扩大k,特征向量不变的定理得出。)
计算主成分有以下两种方法:
1.直接计算D的协方差矩阵C,求R和S。
2.中心化之后,求DTD,求特征向量即为R,特征值/(n-1)即为S。
【例题】
这里用Matlab测试C与DTD的关系
# 方法一
a = [2.5,0.5,2.2,1.9,3.1,2.3,2,1,1.5,1.1];
b = [2.4,0.7,2.9,2.2,3,2.7,1.6,1.1,1.6,0.9];
cov(a,b)
# 输出
ans =
0.6166 0.6154
0.6154 0.7166
# 方法二
# 1.先中心化 (没有中心化得不到上述结果)
a1 = a-mean(a);
b1 = b-mean(b);
# 2. 拼接a1,b1
a1 = a';
b1 = b';
x = [a1,b1]
x =
0.6900 0.4900
-1.3100 -1.2100
0.3900 0.9900
0.0900 0.2900
1.2900 1.0900
0.4900 0.7900
0.1900 -0.3100
-0.8100 -0.8100
-0.3100 -0.3100
-0.7100 -1.0100
# 3. 求(xT*x)/(n-1)
x'*x/9
# 输出
ans =
0.6166 0.6154
0.6154 0.7166
此处需要注意n的含义 ,n是样本的个数。
计算出主成分之后,降至n维:
取前n个最大的特征值对应的特征向量组成矩阵P,D*P即为降维后的结果(第一列x,第二列y,使用matplotlib画二维散点图)。
【例题】
将1个35的向量降维至32,即:5个特征降到2个。res = np.matmul(nor,v)即为降维。
import numpy as np
mat = [[-1,-1,0,2,1],[2,0,0,-1,-1],[2,0,1,1,0]]
mat = np.array(mat)
avg = np.mean(mat,axis=0) # 0:列求平均
nor = mat-avg
n = nor.shape[0]
eigenvalues, eigenvectors = np.linalg.eig(nor.T.dot(nor)/(n-1))
sort = eigenvalues.argsort()[::-1] #表示对特征值eigenvalues 从大到小排序,返回索引值
eigenvalues = eigenvalues[sort]
eigenvectors = eigenvectors[:, sort]
print(eigenvectors.shape) # (5, 5)
v = eigenvectors[:,0:2] # (5, 2) 特征向量是按列排
res = np.matmul(nor,v) #!!!!!降维降维!!!!!!
print(res.shape) # (3, 2)
print(res)
#[[ 2.6838453 -0.36098161]
[-2.09303664 -0.78689112]
[-0.59080867 1.14787272]]
3.作业
此处有坑!!小白我想了一天才发现,传入的data是个n*3的矩阵,不能加颜色那3个维度,也就是如下:
points = points.loc[:,["x","y","z"]] #不加颜色那3个维度
w, v, mid = PCA(points)
p = v[:,0:2]
res = np.matmul(mid,p) # 降维!!
res = np.asarray(res)
#
plt.scatter(res.loc[:,[0]],res.loc[:,[1]])
plt.show()
def PCA(data, correlation=False, sort=True):
# 屏蔽开始
# data的数据类型是pandas,因此加减乘除都需要符合pandas
avg = np.mean(data,axis=0)
# 中心化
nor = data.sub(avg,axis=1)
#SVD
n = nor.shape[0]
eigenvalues, eigenvectors = np.linalg.eig(nor.T.dot(nor)/(n-1)) #自带函数求解特征值特征向量
# 屏蔽结束
if sort:
sort = eigenvalues.argsort()[::-1]
eigenvalues = eigenvalues[sort]
eigenvectors = eigenvectors[:, sort]
return eigenvalues, eigenvectors,nor
结果展示如下:

法向量
用open3d包计算并显示法向量
pyntcloud类型转为open3d类型
p3d = point_cloud_pynt.to_instance("open3d", mesh=False)
多种方法计算法向量
p3d.estimate_normals(
search_param=o3d.geometry.KDTreeSearchParamKNN(knn=15)) # 当前点与15个近邻点构成平面的法向量
p3d.estimate_normals(
search_param=o3d.geometry.KDTreeSearchParamRadius(radius=0.01)) # 搜索半径1cm
p3d.estimate_normals(
search_param=o3d.geometry.KDTreeSearchParamHybrid(radius=0.01, max_nn=20)) # 搜索半径1cm,只考虑邻域内的20个点
# p3d应该有默认的法向量,使用上述方法会更改默认法向量
normals = np.asarray(point_cloud_o3d.normals) # 将法向量转为numpy类型用于打印和显示
显示法向量*
normals = np.array(normals, dtype=np.float64)
p3d.normals = o3d.utility.Vector3dVector(normals)
o3d.visualization.draw_geometries([point_cloud_o3d],point_show_normal=True)
# point_show_normal=True用于显示法向量
point_show_normal=False时,显示原始点云

point_show_normal=True时,显示包含法向量的点云
中心/随机体素滤波(下采样)

随机滤波
利用如上公式求得每个样本点对应的网格索引值index(每个样本对应一个网格索引值),随机选取相同的网格索引值下的一个点(样本索引值)加入filtered_points列表中,并再列表l(l中存储样本索引值)中删除属于该索引的所有元素,重复上述过程至l清空。根据索引列表filtered_points获得点云的6维特征(使用.select_by_index()函数),并显示。
# 实现voxel滤波,并加载数据集中的文件进行验证
import open3d as o3d
import numpy as np
from pyntcloud import PyntCloud
import random
def voxel_filter(point_cloud, leaf_size):
filtered_points = []
# 作业3
# 屏蔽开始
uppers = np.max(point_cloud, axis=0)
lowers = np.min(point_cloud, axis=0)
# 每个格子的长宽高
D = (uppers - lowers) / leaf_size
# 所有点的索引值
H = (point_cloud - lowers) // leaf_size
H = np.asarray(H)
index = H[:, 0] + H[:, 1] * D['x'] + H[:, 2] * D['x'] * D['y'] # 每个样本的索引值
ind = index.argsort() # 存放排序后的索引
l = list(ind)
while len(l) != 0:
i = 0
find_n = np.where(index == index[l[i]])
# 随机抽取元素
ran = random.choice(find_n[0])
filtered_points.append(ran)
l = list(set(l) - set(find_n[0]))
# 屏蔽结束
# 把点云格式改成array,并对外返回
# filtered_points = np.array(filtered_points, dtype=np.float64)
# print(filtered_points)
return filtered_points
def main():
data_dir = 'D:/BaiduNetdiskDownload/modelnet40_normal_resampled/modelnet40_normal_resampled/'
with open(data_dir + 'modelnet40_shape_names.txt') as f:
a = f.readlines()
point_cloud_pynt = PyntCloud.from_file(
data_dir + 'airplane/airplane_0002.txt', sep=",",
names=["x", "y", "z", "nx", "ny", "nz"])
point = point_cloud_pynt.points
point = point.loc[:, ["x", "y", "z"]]
# 转成open3d能识别的格式
point_cloud_o3d = point_cloud_pynt.to_instance("open3d", mesh=False)
# o3d.visualization.draw_geometries([point_cloud_o3d]) # 显示原始点云
# 调用voxel滤波函数,实现滤波
filtered_cloud = voxel_filter(point, 0.1) # 100
for_show = point_cloud_o3d.select_by_index(filtered_cloud)
# 显示滤波后的点云
o3d.visualization.draw_geometries([for_show])
o3d.visualization.draw_geometries([point_cloud_o3d])
if __name__ == '__main__':
main()
中心滤波
# voxel_filter.py 放了全部代码
# 实现voxel滤波,并加载数据集中的文件进行验证
import open3d as o3d
import os
import numpy as np
from pyntcloud import PyntCloud
import random
import pandas as pd
def voxel_filter(point_cloud, leaf_size):
point = point_cloud.loc[:, ["x", "y", "z"]]
filtered_points = pd.DataFrame()
# 作业3
# 屏蔽开始
uppers = np.max(point, axis=0)
lowers = np.min(point, axis=0)
#每个格子的长宽高
D = (uppers-lowers)/leaf_size
#所有点的索引值
H = (point-lowers)//leaf_size
H = np.asarray(H)
index = H[:,0]+H[:,1]*D['x']+H[:,2]*D['x']*D['y'] #每个样本的索引值
ind = index.argsort() #存放排序后的索引
l = list(ind)
while len(l)!=0:
find_n = np.where(index==index[l[0]])
selected = point_cloud.iloc[find_n[0]]
p = np.mean(selected)
filtered_points = pd.concat([filtered_points,p],axis=1)
l = list(set(l)-set(find_n[0]))
# 屏蔽结束
# 把点云格式改成array,并对外返回
# filtered_points = np.array(filtered_points, dtype=np.float64)
# print(filtered_points)
filtered_points = filtered_points.T
return filtered_points
def main():
data_dir='D:/BaiduNetdiskDownload/modelnet40_normal_resampled/modelnet40_normal_resampled/'
point_cloud_pynt = PyntCloud.from_file(
data_dir+'cup/cup_0002.txt', sep=",",
names=["x", "y", "z", "nx", "ny", "nz"])
point = point_cloud_pynt.points
# 转成open3d能识别的格式
# point_cloud_o3d = point_cloud_pynt.to_instance("open3d", mesh=False)
# o3d.visualization.draw_geometries([point_cloud_o3d]) # 显示原始点云
# 调用voxel滤波函数,实现滤波
filtered_cloud = voxel_filter(point, 0.05) #100
point_cloud_pynt.points = filtered_cloud
point_cloud_o3d = point_cloud_pynt.to_instance("open3d", mesh=False)
# point_cloud_o3d.points = o3d.utility.Vector3dVector(for_show)
# 显示滤波后的点云
o3d.visualization.draw_geometries([point_cloud_o3d])
if __name__ == '__main__':
main()
两种方式的对比结果如下:
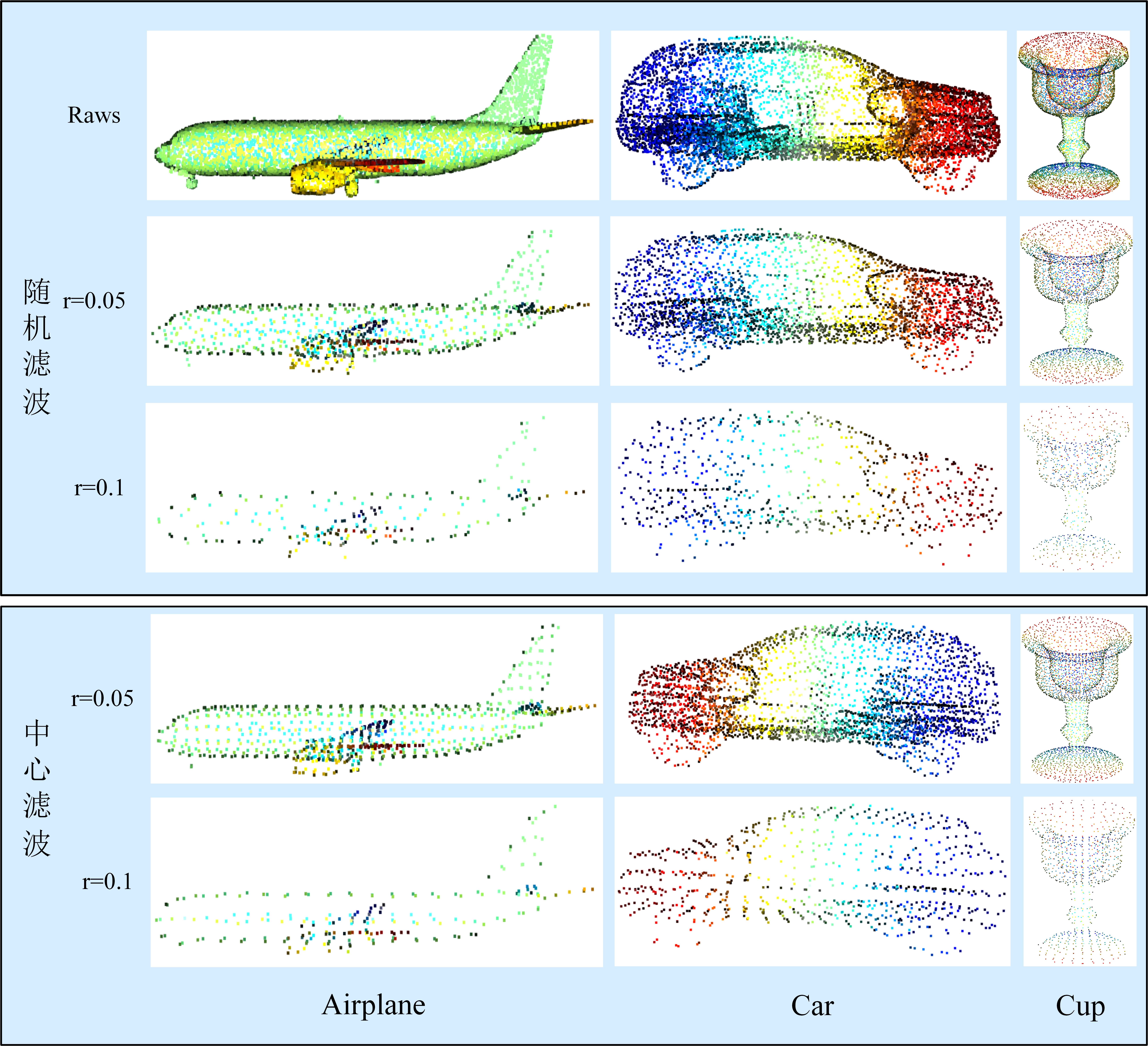
特别注意: 两种方法的代码其函数voxel_filter()的输入输出有所不同,因为随机滤波只需要x,y,z三个特征,所以输入只需要前三个特征,输出为下采样后样本的索引值。中心滤波需要求全部特征的平均值,所以对6个特征求平均值,并存储至DataFrame中进行输出,返回结果就是下采样后的点云。















 6826
6826

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









