







一、背景
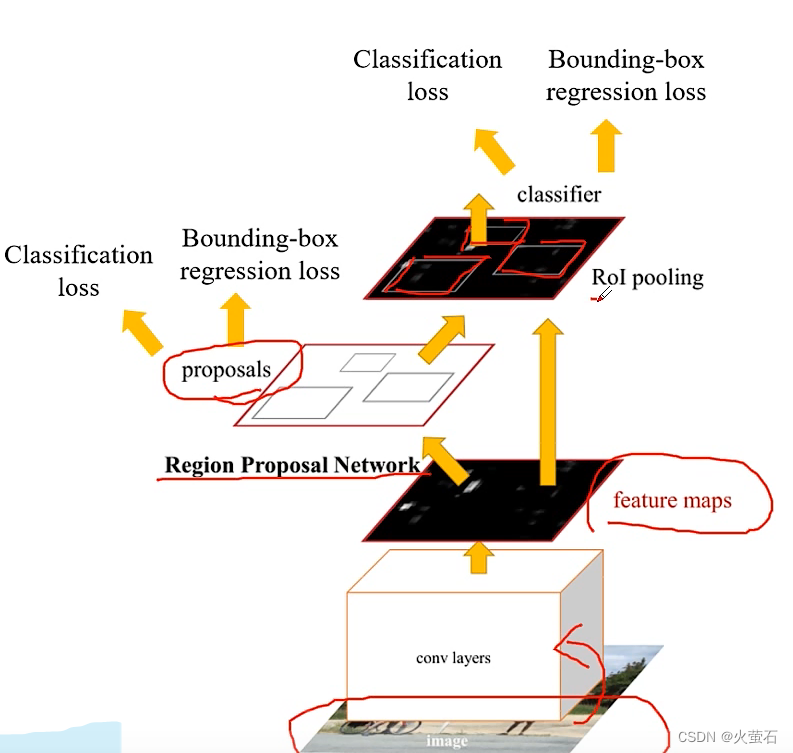
- faster RCNN的缺点:
- 对小目标检测效果很差、
- 模型大。检测速度慢
二、SSD
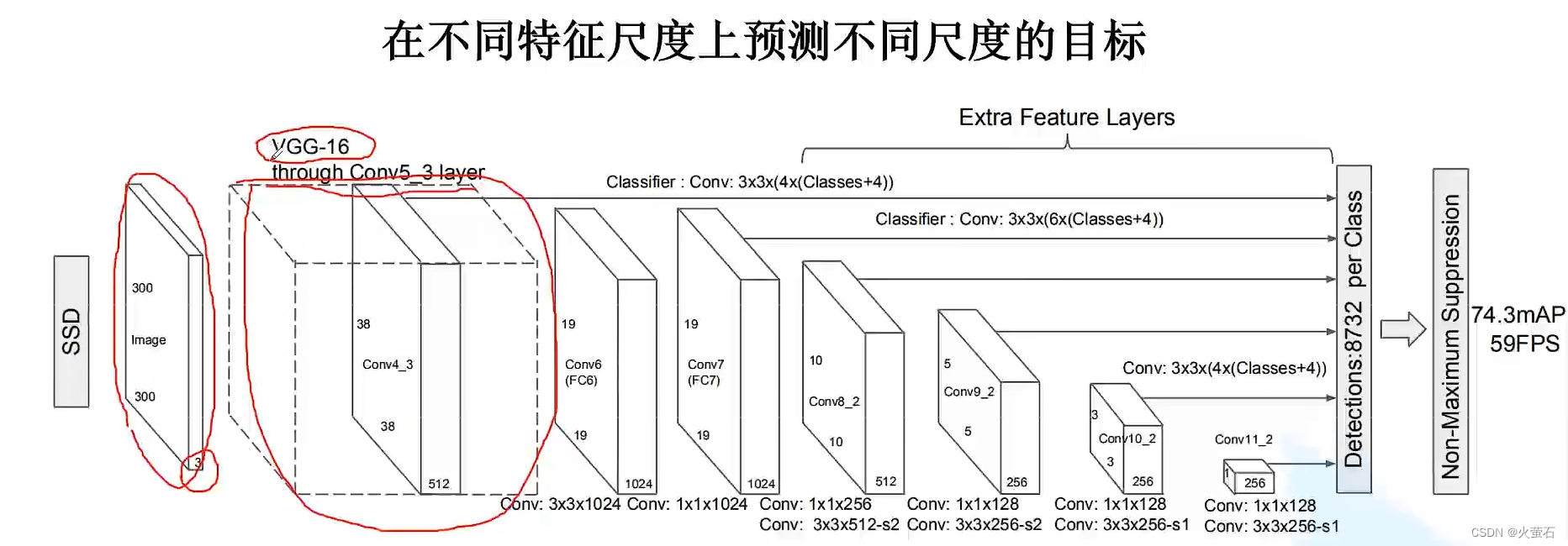
- 上面可以看到,经过backbone得到的featuremap会经过6个不同的预测特征层,预测不同比例、不同尺度的目标(目的是可以检测不同的大小的物体)
- 最后在经过非极大值抑制(滤除小概率目标)得到最终的预测结果
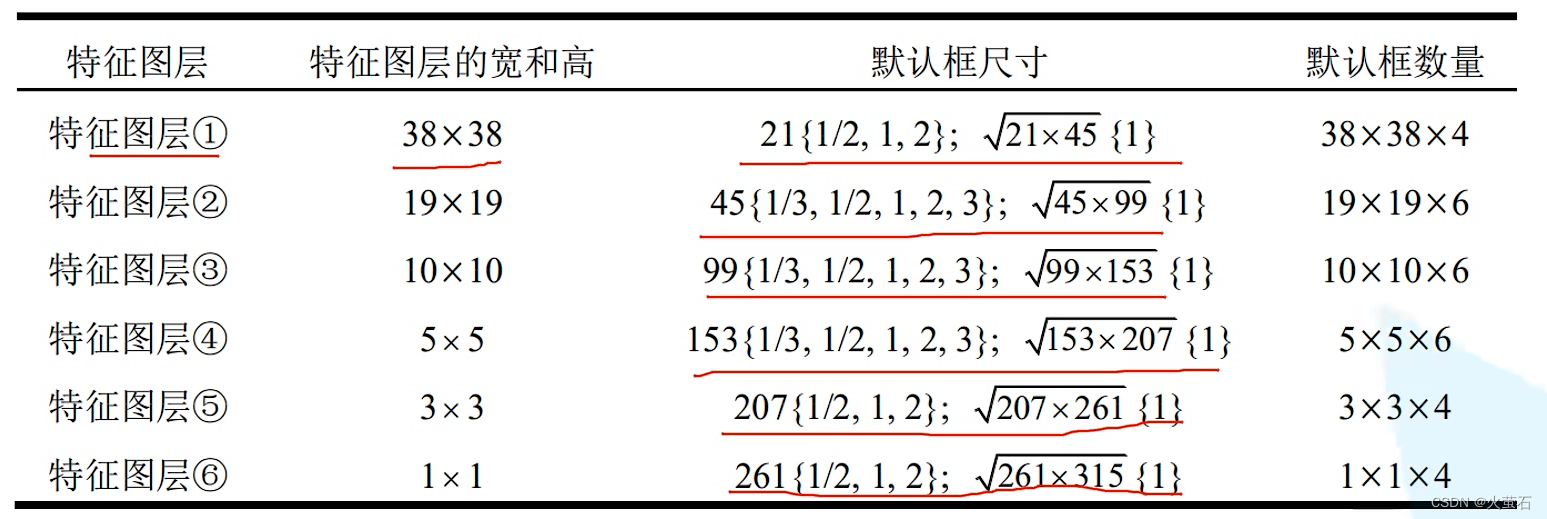
1、Defaulte Box的scale以及aspect
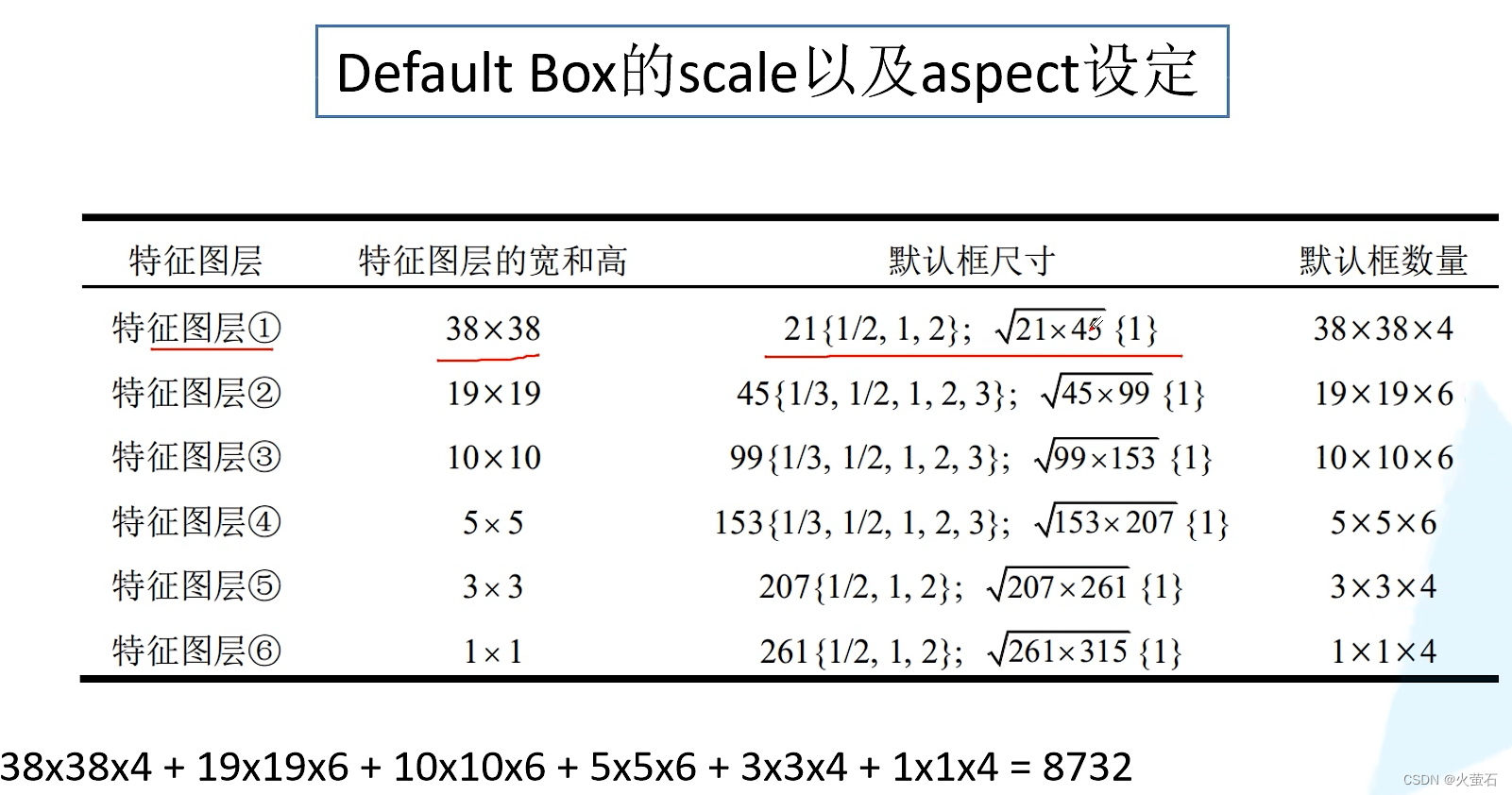
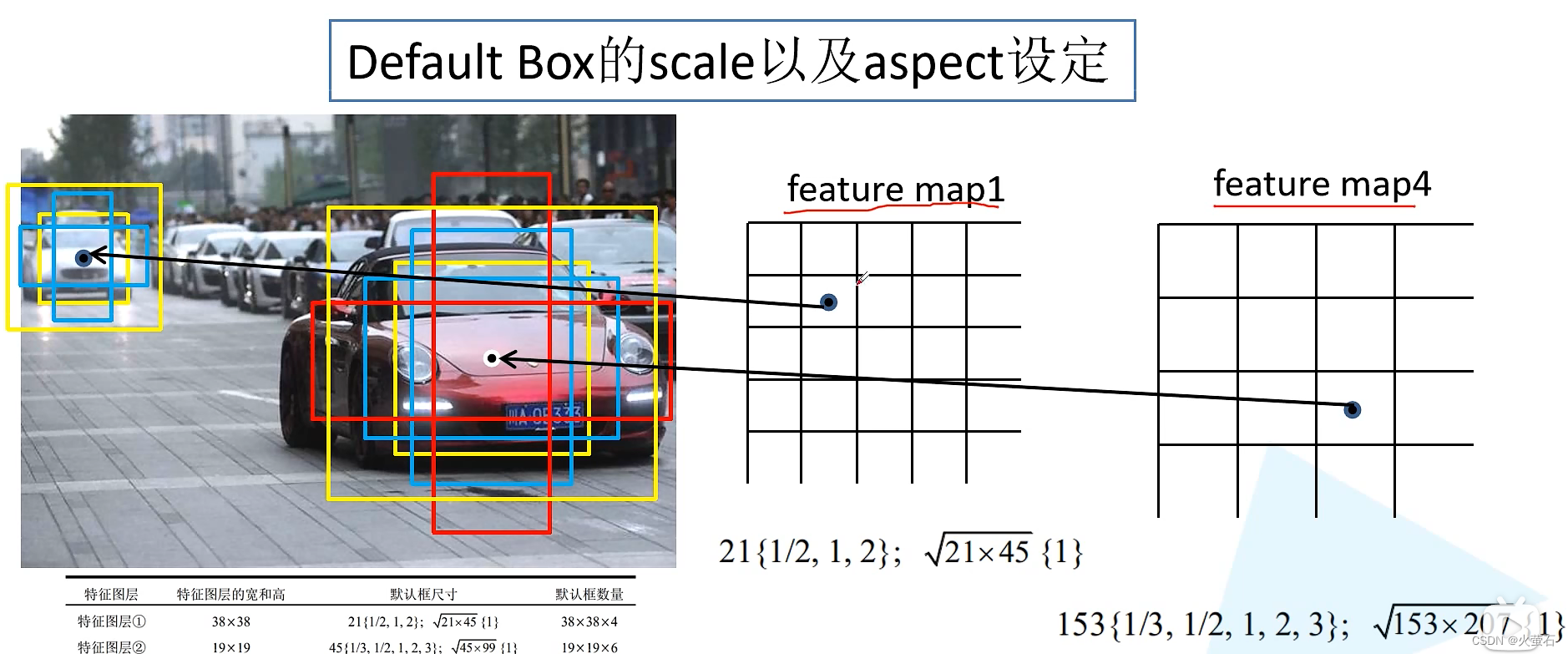
- 在这6个feature map上会生成8732个Default Box
- 下面给出预测特征层1与预测特征层4
2、Prdictor的实现
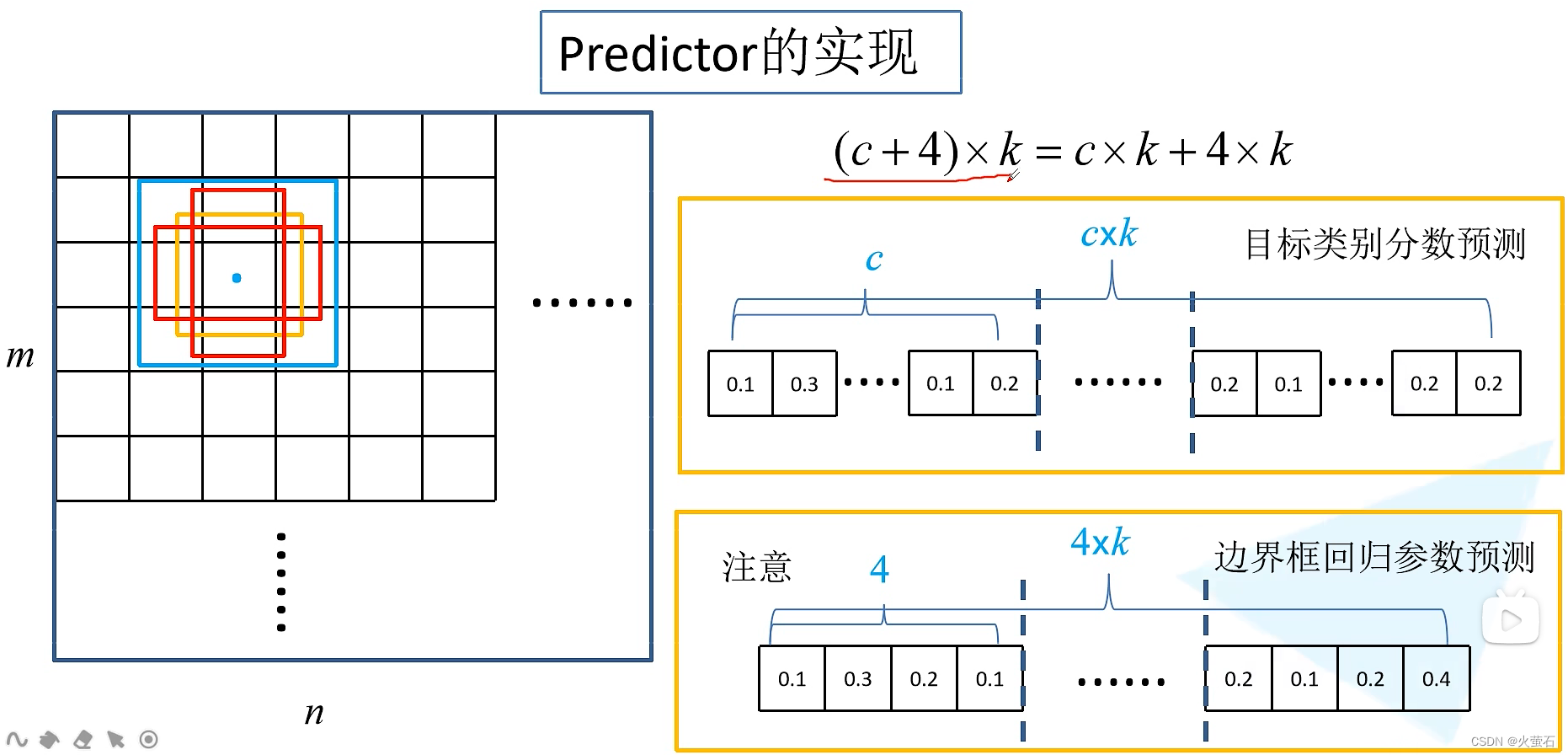
- 对于size为mn,channel为p的feature layer,使用33*p的卷积核去卷积,得到类型概率分数以及default box的坐标偏移量
- 对feature map上的每一个位置会生成k个default box。对应的一个位置生成c个类别分数以及4个坐标偏移量(x,y,w,h)。最后得到我们总共需要(c+4)*k个卷积核
三、训练
1、正负样本得选取
- 正样本匹配准则:
- 每一个真实框匹配IOU值最大default box
- 任意一个default box只要与任何一个真实框的IOU值大于0.5。
- 负样本:
- 剩下的负样本计算他们the highest confidence loss。
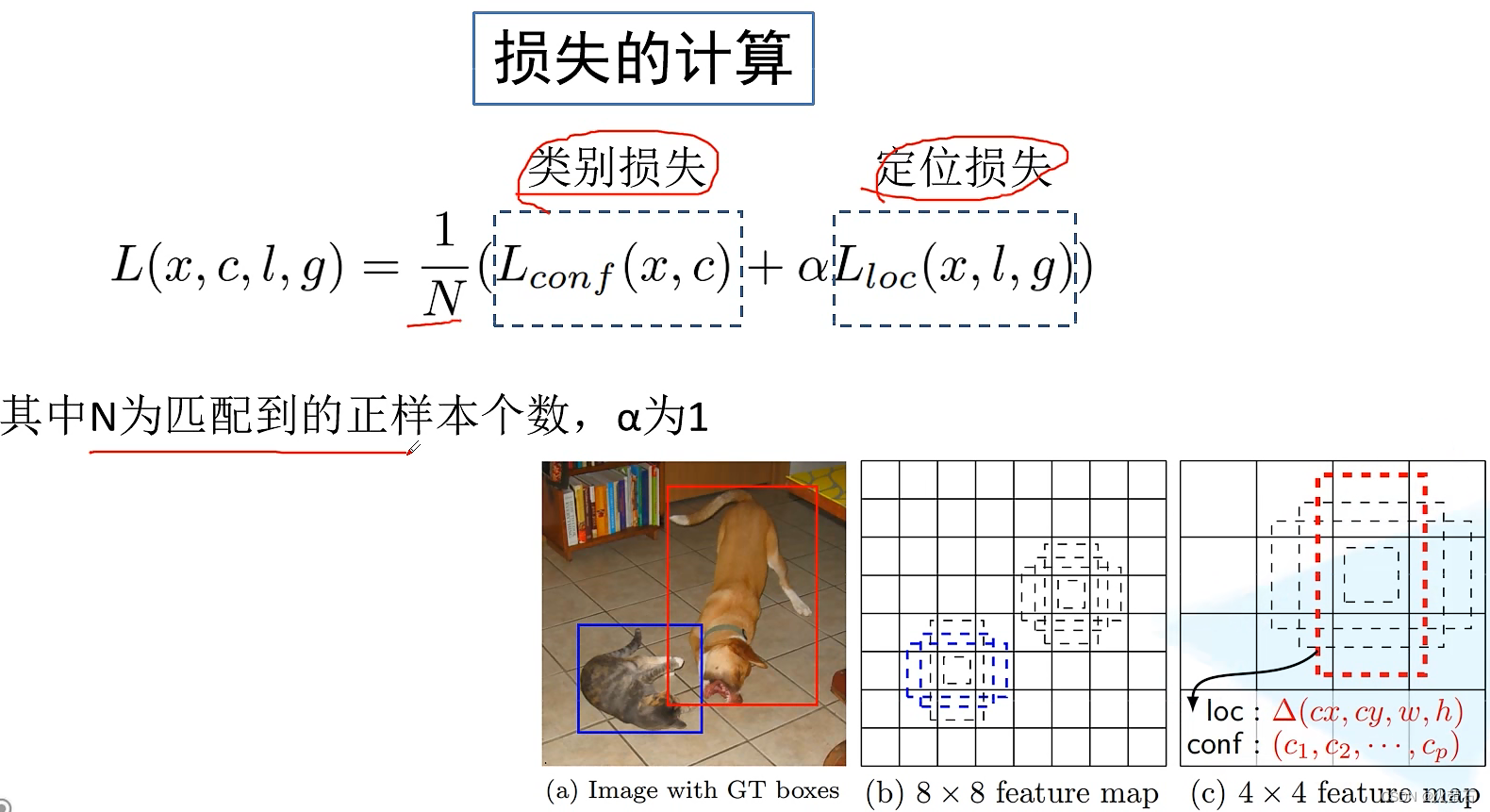
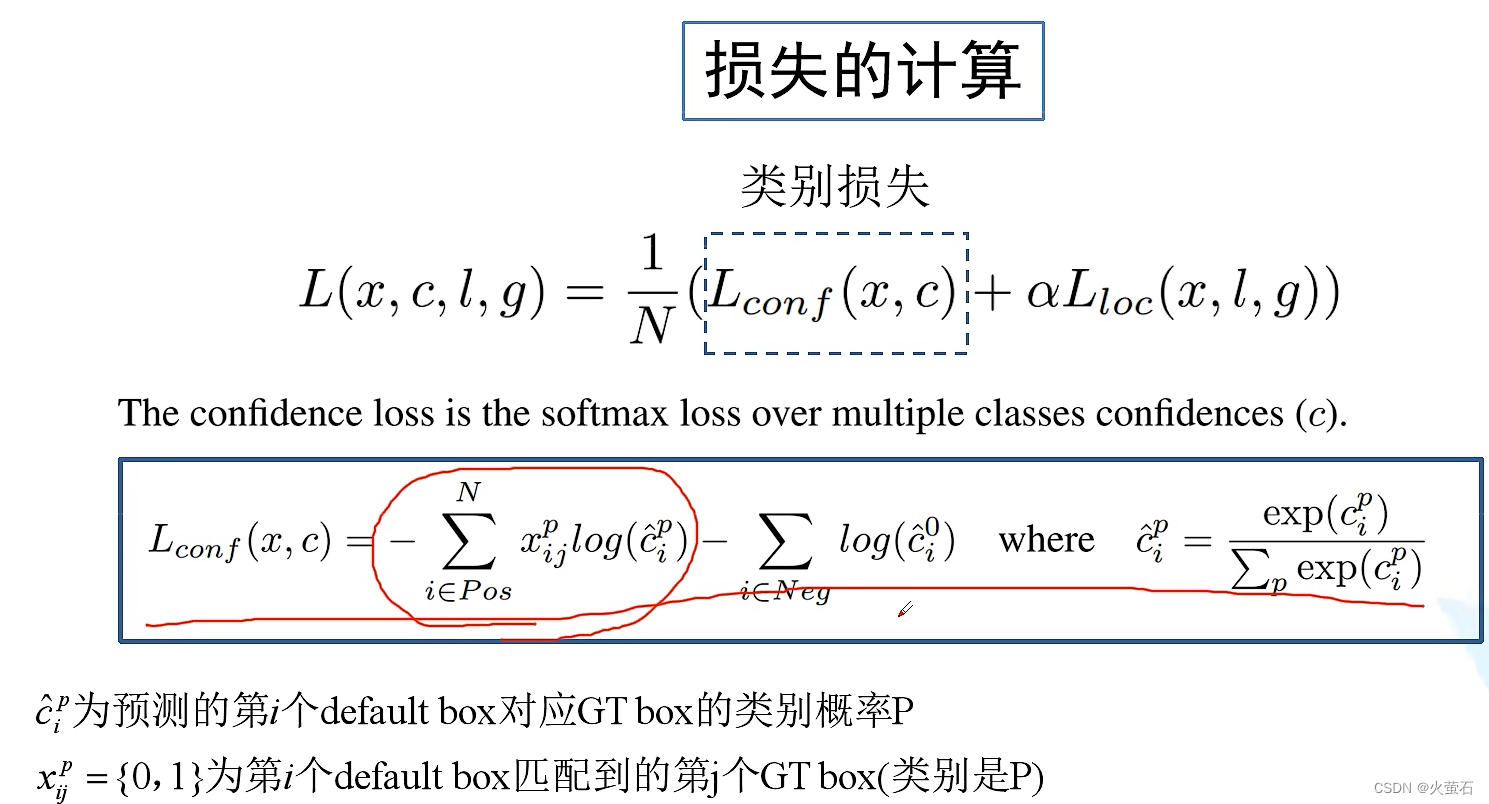
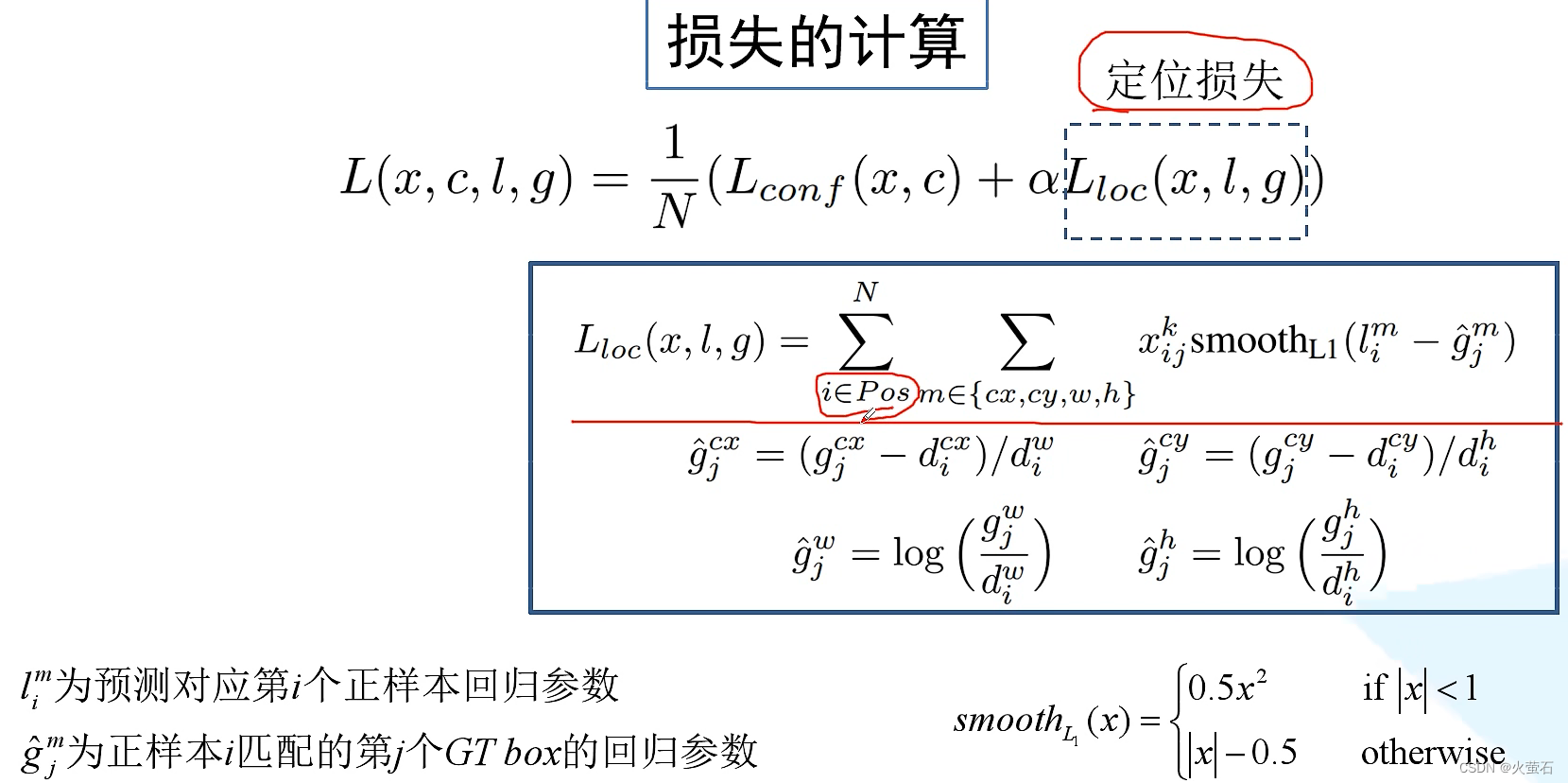
2、损失的计算
参考链接:https://www.bilibili.com/video/BV1fT4y1L7Gi/
参考链接:https://pan.baidu.com/s/15zF3GhIdg-E_tZX2Y2X-rw

















 4292
4292











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











