







 本文介绍了自动驾驶领域中的不同坐标系,包括像素坐标系、图像坐标系、Camera坐标系、Lidar坐标系、Ego坐标系和Global坐标系,以及它们之间的转换关系。详细阐述了每个坐标系的定义,并提供了转换公式,如图像坐标系到像素坐标系,Camera坐标系到像素坐标系等。
本文介绍了自动驾驶领域中的不同坐标系,包括像素坐标系、图像坐标系、Camera坐标系、Lidar坐标系、Ego坐标系和Global坐标系,以及它们之间的转换关系。详细阐述了每个坐标系的定义,并提供了转换公式,如图像坐标系到像素坐标系,Camera坐标系到像素坐标系等。
文章目录
前言
提示:本篇文章非专业人士所作,内容仅可作为入门,如果喜欢,请点赞~
介绍了一下自动驾驶领域的各个坐标系的知识。
- 首先,介绍多种坐标系的定义。
- 其次,介绍各个坐标系之间的转换过程。
一、坐标系种类
坐标系按照维度分,可以分为2种:
- 2D坐标系;
- 3D坐标系。
按照种类分,可以分为多种:
- 像素坐标系;
- 图像坐标系;
- Camera坐标系,也称相机坐标系;
- Lidar坐标系,也称激光雷达坐标系;
- Ego坐标系,也称车自身坐标系;
- Global坐标系,也称世界坐标系;
- Radar坐标系(本篇文章不讨论)。
二、各种坐标系的定义
1.像素坐标系
像素坐标系(Pixel Coordinate System)是图像处理中最基本的坐标系,是2D坐标系,使用像素坐标来表示图像中每个像素点的位置。与CV图像处理的坐标系一致
- 原点 O ( 0 , 0 ) O(0, 0) O(0,0)为整个图像的左上角点;
- u轴正向水平向右,v轴正向竖直向下;
- 坐标系的像素位置用
(u,v)来表示。
2.图像坐标系
图像坐标系(Image Coordinate System)是基于像素坐标系的扩展,是2D坐标系,用来表示图像中像素点的物理位置。
- 原点
O
I
M
G
(
0
,
0
)
O_{IMG}(0,0)
OIMG(0,0)为像素坐标系中的图像的中点位置;
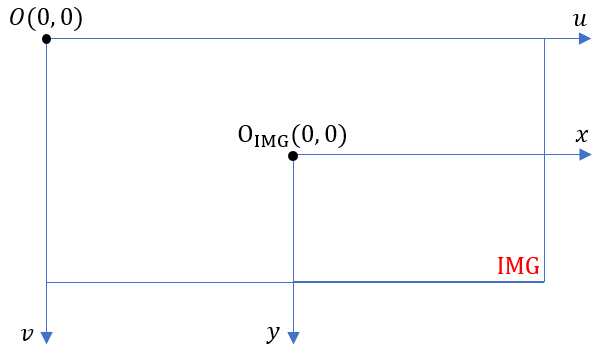
- Y轴正向水平向右,Y轴正向竖直向下;
- 坐标系的位置用
(x,y)来表示。
3.Camera坐标系
Camera坐标系(Camera Coordinate System)相机坐标系是相机(摄像机)内部的坐标系,是3D坐标系,用来表示相机成像时的物体位置,用于描述相机看到的三维世界。
- Camera坐标系的原点为光心(光学中心);
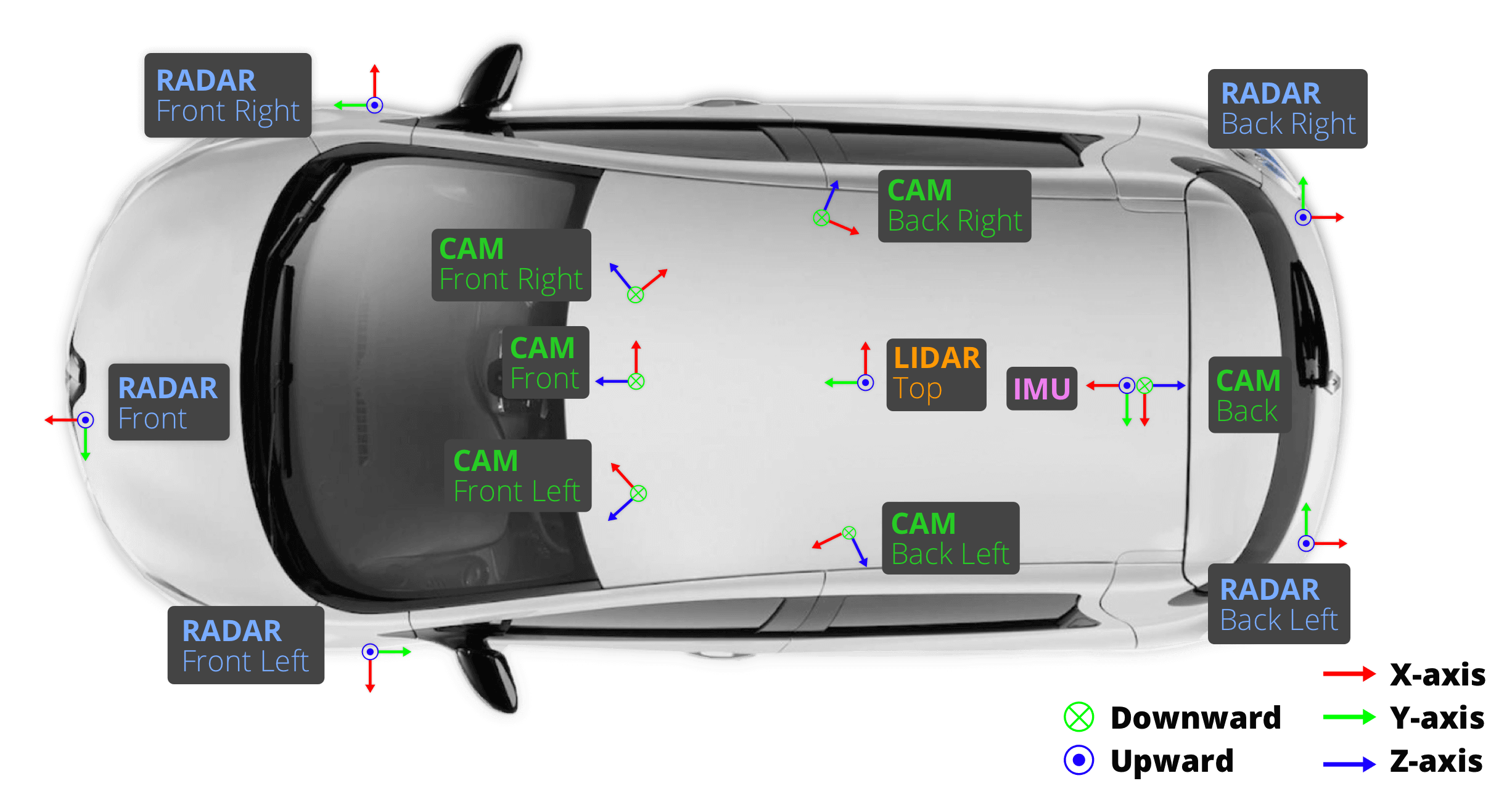
- 以Nuscenes数据集为例,X轴正向指向相机右侧,Y轴正向指向相机的下方,Z轴正向指向相机的光轴(光学轴)方向;
这里需要注意一点,就是Nuscenes数据集中,另外的5个Camera的坐标系都会被转换到Camera0位置的坐标系上进行统一,具体代码自己发掘下,我记得是这样。
- 坐标系的位置用
(xc,yc,zc)来表示。
4.Lidar坐标系
Lidar坐标系(Lidar Coordinate System)是激光雷达感知系统内部的坐标系,是3D坐标系,用来表示Lidar扫描时物体的位置,也即描述Lidar看到的三维世界。
- LiDAR坐标系的原点通常位于Lidar传感器本身的位置;
- 以Nuscenes数据集为例,X轴正向指向传感器的右侧,Y轴正向指向传感器的正前,Z轴正向指向传感器的上方;
- 坐标系的位置用
(xl,yl,zl)来表示。
5.Ego坐标系
Ego坐标系(Egocentric coordinate system),在自动驾驶中是以车辆为参考物体建立的坐标系,也称为本体坐标系或局部坐标系。
- 原点通常是车辆的中心点,与车辆或机器人的运动方向相关;
- X轴通常指向车辆的前进方向,Y轴指向车辆的左侧,Z轴垂直于地面。
6.Global坐标系
Global坐标系,也被称为世界坐标系(World coordinate system),在自动驾驶领域,Global坐标系用于建立一个全局参考框架,以描述车辆在地图或整个环境中的绝对位置和方向。
- 原点是一个被选定的固定点;
- 坐标系的位置用
(xw,yw,zw)来表示。
三、各种坐标系之间的转换
主要就看下面这张图的转换关系来理解吧!
其中的圆圈123...与本节的转换内容小章节编号对应。
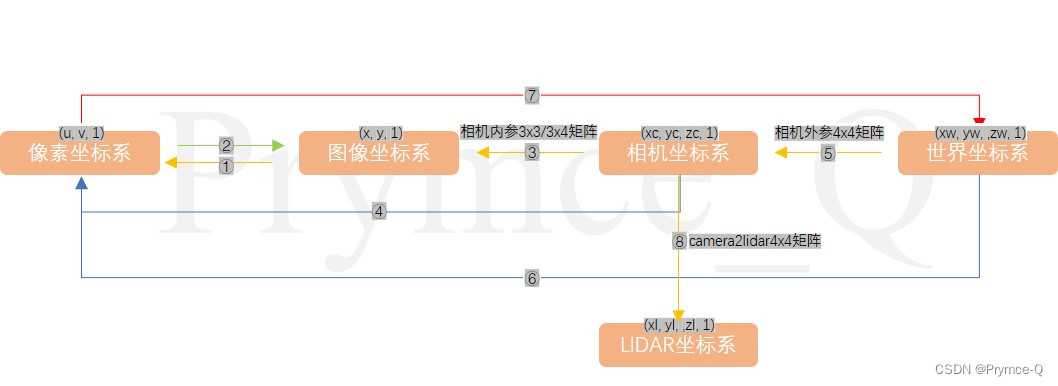
1.图像坐标系 => 像素坐标系
假设物理坐标系的单位为毫米,dx、dy的单位都为毫米/像素。
根据上图的关系,假设图像坐标系原点
O
I
M
G
O_{IMG}
OIMG在像素坐标系中的位置为(u_0,v_0)。则像素坐标系中的点(u,v)可以通过一个3x3矩阵被图像坐标系中的点(x,y)表示如下
[
u
v
1
]
=
[
1
/
d
x
0
u
0
0
1
/
d
y
v
0
0
0
1
]
3
×
3
[
x
y
1
]
\begin{bmatrix} u \\ v \\ 1 \\ \end{bmatrix} = \begin{bmatrix} {1/dx} & 0 & {u_0} \\ 0 & {1/dy} & {v_0} \\ 0 & 0 & 1 \\ \end{bmatrix}_{3\times 3}\begin{bmatrix} x \\ y \\ 1 \\ \end{bmatrix}
uv1
=
1/dx0001/dy0u0v01
3×3
xy1
2.像素坐标系 => 图像坐标系
根据上面的结论,可以通过3x3矩阵的逆将像素坐标系中的点(u,v)用图像坐标系中的点(x,y)表示,如下
[ x y 1 ] = [ d x 0 − u 0 d x 0 d y − v 0 d y 0 0 1 ] 3 × 3 [ u v 1 ] \begin{bmatrix} x \\ y \\ 1 \\ \end{bmatrix} = \begin{bmatrix} {dx} & 0 & {- u_0dx} \\ 0 & {dy} & {- v_0dy} \\ 0 & 0 & 1 \\ \end{bmatrix}_{3\times 3}\begin{bmatrix} u \\ v \\ 1 \\ \end{bmatrix} xy1 = dx000dy0−u0dx−v0dy1 3×3 uv1
3.Camera坐标系 => 图像坐标系
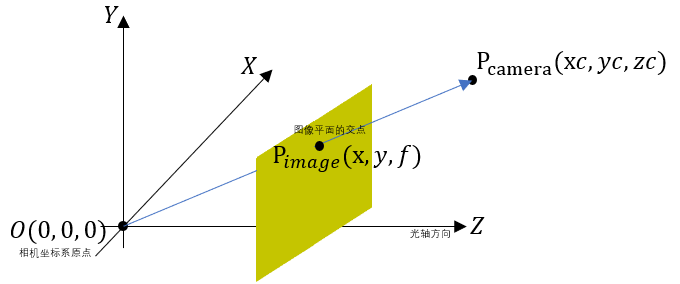
Camera坐标系是3D坐标系,而图像坐标系是2D坐标系,根据上图逻辑与相似三角形原理,f表示相机的焦距,假设相机坐标系中的点为(xc,yc,zc),则图像坐标系的点(x,y)可以被表示为
[
x
y
1
]
=
1
z
c
[
f
0
0
0
0
f
0
0
0
0
1
0
]
3
×
4
[
x
c
y
c
z
c
1
]
\begin{bmatrix} x \\ y \\ 1 \\ \end{bmatrix} = \frac{1}{zc}\begin{bmatrix} {f} & 0 & 0 & 0 \\ 0 & {f} & 0 & 0 \\ 0 & 0 & 1 & 0 \\ \end{bmatrix}_{3\times 4}\begin{bmatrix} {xc} \\ {yc} \\ {zc} \\ 1 \\ \end{bmatrix}
xy1
=zc1
f000f0001000
3×4
xcyczc1
其中,这个3x4矩阵是相机的内参矩阵
K
1
K_1
K1,其也可以写成3x3的形式,写成3x4是为了齐次。
相机的内参矩阵(Camera Intrinsic Matrix)是用来描述相机成像的内部几何特性。
K 1 = [ f 0 0 0 f 0 0 0 1 ] 3 × 3 K_1= \begin{bmatrix} {f} & 0 & 0 \\ 0 & {f} & 0 \\ 0 & 0 & 1 \\ \end{bmatrix}_{3\times 3} K1= f000f0001 3×3
4.Camera坐标系 => 像素坐标系
由于Camera坐标系 => 图像坐标系 => 像素坐标系,因此我们可以得到Camera坐标系 => 像素坐标系的关系式。像素坐标系的点(u,v)可以被Camera坐标系的点(xc,yc,zc)表示如下
[ u v 1 ] = 1 z c [ f / d x 0 u 0 0 0 f / d y v 0 0 0 0 1 0 ] 3 × 4 [ x c y c z c ] \begin{bmatrix} u \\ v \\ 1 \\ \end{bmatrix} = \frac{1}{zc}\begin{bmatrix} {f/dx} & 0 & {u_0} &0 \\ 0 & {f/dy} & {v_0} &0\\ 0 & 0 & 1 & 0\\ \end{bmatrix}_{3\times 4}\begin{bmatrix} {xc} \\ {yc} \\ {zc} \\ \end{bmatrix} uv1 =zc1 f/dx000f/dy0u0v01000 3×4 xcyczc
5.Global坐标系 => Camera坐标系
Global坐标系与Camera坐标系的转换,需要用到相机的外参矩阵
K
2
K_2
K2,是一个4x4矩阵。
相机的外参矩阵(Camera Extrinsic Matrix)是用来描述相机在世界坐标系中的位置和方向的矩阵。表示为
K 2 = [ R 3 × 3 T 3 × 1 0 1 × 3 1 ] 4 × 4 K_2 = \begin{bmatrix} R_{3\times 3} & T_{3\times 1} \\ 0_{1\times 3} & 1 \\ \end{bmatrix}_{4\times 4} K2=[R3×301×3T3×11]4×4
其中R是一个3x3矩阵,表示相机坐标系相对于世界坐标系的旋转关系;T是一个3x1向量,表示相机坐标系相对于世界坐标系的平移关系。
则Camera坐标系下的点(xc,yc,zc)可以被Global坐标系的点(xw,yw,zw)表示如下
[
x
c
y
c
z
c
]
=
K
2
∗
[
x
w
y
w
z
w
1
]
=
[
R
T
0
1
]
4
×
4
[
x
w
y
w
z
w
1
]
\begin{bmatrix} {xc} \\ {yc} \\ {zc} \\ \end{bmatrix} = K_2*\begin{bmatrix} {xw} \\ {yw} \\ {zw} \\ 1 \\ \end{bmatrix} = \begin{bmatrix} R & T \\ 0 & 1 \\ \end{bmatrix}_{4\times4}\begin{bmatrix} {xw} \\ {yw} \\ {zw} \\ 1 \\ \end{bmatrix}
xcyczc
=K2∗
xwywzw1
=[R0T1]4×4
xwywzw1
6.Global坐标系 => 像素坐标系
由于Global坐标系 => Camera坐标系 => 图像坐标系 => 像素坐标系,因此我们可以得到Global坐标系 => 像素坐标系的关系式。则像素坐标系下的点(u,v)可以被Global坐标系的点(xw,yw,zw)表示如下
z
c
[
u
v
1
]
=
[
1
/
d
x
0
u
0
0
1
/
d
y
v
0
0
0
1
]
3
×
3
[
f
x
0
0
0
0
f
y
0
0
0
0
1
0
]
3
×
4
[
R
T
0
1
]
4
×
4
[
x
w
y
w
z
w
1
]
zc\begin{bmatrix} u \\ v \\ 1 \\ \end{bmatrix} = \begin{bmatrix} {1/dx} & 0 & {u0} \\ 0 & {1/dy} & {v0} \\ 0 & 0 & 1 \\ \end{bmatrix}_{3\times 3}\begin{bmatrix} {fx} & 0 & 0 & 0 \\ 0 & {fy} & 0 & 0 \\ 0 & 0 & 1 & 0 \\ \end{bmatrix}_{3\times 4}\begin{bmatrix} R & T \\ 0 & 1 \\ \end{bmatrix}_{4\times 4}\begin{bmatrix} {xw} \\ {yw} \\ {zw} \\ 1 \\ \end{bmatrix}
zc
uv1
=
1/dx0001/dy0u0v01
3×3
fx000fy0001000
3×4[R0T1]4×4
xwywzw1
7.像素坐标系 => Global坐标系
反之,Global坐标系的点(xw,yw,zw)可以被像素坐标系下的点(u,v)表示如下
[ x w y w z w 1 ] = z c ∗ K 2 − 1 K 1 − 1 [ 1 / d x 0 u 0 0 1 / d y v 0 0 0 1 ] 3 × 3 − 1 [ u v 1 ] \begin{bmatrix} {xw} \\ {yw} \\ {zw} \\ 1 \\ \end{bmatrix} =zc* {K_2}^{- 1}{K_1}^{- 1} \begin{bmatrix} {1/dx} & 0 & {u0} \\ 0 & {1/dy} & {v0} \\ 0 & 0 & 1 \\ \end{bmatrix}_{3\times 3}^{-1}\begin{bmatrix} u \\ v \\ 1 \\ \end{bmatrix} xwywzw1 =zc∗K2−1K1−1 1/dx0001/dy0u0v01 3×3−1 uv1
8.Camera坐标系 => Lidar坐标系
根据MMDetection3D的mmdet3d/datasets/nuscenes_dataset.py代码,
if self.modality['use_camera']:
image_paths = []
lidar2img_rts = [] # 用来保存6个lidar2img_rt矩阵的(因为有6个相机)
camera2lidar_rts = [] # 用来保存6个camera2lidar矩阵
# 为每一个相机cam生成了lidar2img_rt矩阵与camera2lidar矩阵
for cam_type, cam_info in info['cams'].items():
image_paths.append(cam_info['data_path'])
# obtain lidar to image transformation matrix 3
lidar2cam_r = np.linalg.inv(cam_info['sensor2lidar_rotation'])
lidar2cam_t = cam_info[
'sensor2lidar_translation'] @ lidar2cam_r.T
lidar2cam_rt = np.eye(4)
lidar2cam_rt[:3, :3] = lidar2cam_r.T
lidar2cam_rt[3, :3] = -lidar2cam_t
intrinsic = cam_info['cam_intrinsic']
viewpad = np.eye(4)
viewpad[:intrinsic.shape[0], :intrinsic.shape[1]] = intrinsic
lidar2img_rt = (viewpad @ lidar2cam_rt.T)
lidar2img_rts.append(lidar2img_rt)
# camera to lidar transform
camera2lidar = np.eye(4).astype(np.float32) # 4x4
camera2lidar[:3, :3] = cam_info["sensor2lidar_rotation"] # 旋转3x3矩阵
camera2lidar[:3, 3] = cam_info["sensor2lidar_translation"] # 平移3x1向量
camera2lidar_rts.append(camera2lidar)
input_dict.update(
dict(
img_filename=image_paths,
lidar2img=lidar2img_rts,
camera2lidar=camera2lidar_rts,
))
在Nuscenes数据集的处理代码中,可以看到:camera2lidar是一个4x4矩阵,其将Camera坐标系下的点(xc, yc,zc,1)转化到Lidar坐标系中的点(xl,yl,zl,1)。
至此,所有的转换线路都是已知。
总结
很浅显的跟着Chat工具整理了下大致的思路,不是很全很深刻,如果有其他见解,可以在评论区留言。
如果喜欢的话,可以点个赞哦~



















 462
462

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











