




 本文详细介绍了PanoSim汽车自动驾驶仿真测试平台及其在LDW车道偏离预警系统和LDP车道偏离预防系统开发中的应用。PanoSim提供全面的模型库和工具链,支持离线仿真、硬件在环测试等,为ADAS算法研发提供便利。LDW通过监测车道线防止无意识偏离,LDP则通过自动控制方向盘辅助保持车道。文章还阐述了LDW/LDP的算法细节,包括车道线拟合、速度计算和转向控制策略,并探讨了实际应用场景中的验证和优化。
本文详细介绍了PanoSim汽车自动驾驶仿真测试平台及其在LDW车道偏离预警系统和LDP车道偏离预防系统开发中的应用。PanoSim提供全面的模型库和工具链,支持离线仿真、硬件在环测试等,为ADAS算法研发提供便利。LDW通过监测车道线防止无意识偏离,LDP则通过自动控制方向盘辅助保持车道。文章还阐述了LDW/LDP的算法细节,包括车道线拟合、速度计算和转向控制策略,并探讨了实际应用场景中的验证和优化。
一、PanoSim简介
PanoSim是一款面向汽车自动驾驶技术与产品研发的一体化仿真与测试平台,集高精度车辆动力学模型、高逼真汽车行驶环境与交通模型、车载环境传感器模型和丰富的测试场景于一体,支持与Matlab/Simulink联合无缝仿真,提供包括离线仿真、实时硬件在环仿真(MIL/SIL/HIL/VIL)和驾驶模拟器等在内的一体化解决方案;支持包括ADAS和自动驾驶环境感知、决策规划与控制执行等在内的算法研发与测试。PanoSim具有很强的开放性与拓展性,支持定制化开发,操作简便友好,已在美国通用汽车、德国戴姆勒汽车、上汽集团和东风汽车等企业和科研院所广泛使用。

PanoSim汽车智能驾驶一体化仿真测试平台具备功能强大且齐全的模型库和仿真测试工具链,结合灵活开放的云端一体软件架构,为自动驾驶行业测试机构和产业链正向开发提供全流程实践支撑。
二、LDW简介
汽车车道偏移预警系统,LDW英文全称为:Lane Departure Warning,缩写为LDW。车道偏离预警LDW通过摄像头监测前方道路车道线,当判断发生驾驶员无意识状态下、车辆偏离车道线情况,系统将通过声音、振动等方式向驾驶员发出预警。 这是继车道偏离预警(LDW)旨在帮助驾驶员在高速公路、快速道路等类似主干道上减少因为车身偏移而造成各种危险事故,当车速大于或等于60km/h且道路标线清晰可见时,车道偏离预警功能启用,车道偏离预警(LDW)将通过视觉、听觉和触觉的方式警告驾驶员。如果转向信号指示灯处于开启状态或驾驶员有明显的转向意图(如快速转动方向盘等),车道偏离预警(LDW)将不会发出警示。
这种系统的主要作用,就是当汽车偏离原车道时,能够迅速判断该动作是否属于驾驶者的无意识行为,从而在0.5秒内作出反应。在对驾驶者进行明确警示的基础上,提醒驾驶者尽快纠正错误的驾驶行为,从而减少汽车因车道偏离而发生交通事故。
三、LDW开发背景
据交通部统计,约有50%的汽车交通事故是因为汽车偏离正常的行驶车道引起的。究其原因,主要有驾驶员情绪不稳定、注意力不集中或驾驶疲劳等几种情形。另据统计,23%的汽车驾驶者一个月内至少在转向盘上睡着一次;66%的卡车驾驶者在驾驶过程中会有打瞌睡的经历;而28%的卡车驾驶者在一个月内会有在转向盘上睡着的经历。如此惊人的比例足以证明防止车道偏离的重要意义。
另外,根据美国联邦公路局的估计,美国2002年所有致命的交通事故中44%是跟车道偏离有关的,同时车道偏离也被看成车辆侧翻事故的主要原因。四个驾驶员中就有一个驾驶员经历过车道偏离引起的伤亡事故。

这些数据表明,搭载车道偏离预警系统(LDW)后,由于减少了非正常的车道偏离,汽车行驶的安全性将大大提高,交通事故的发生率也将显著下降。故此,LDW系统正逐渐成为汽车安全技术的重要组成部分。
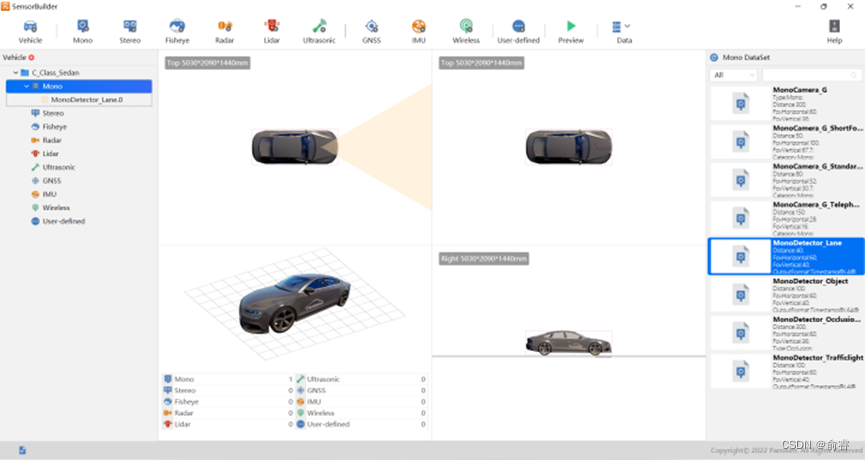
四、LDW控制系统接口
下图为PanoSim传感器配置SensorBuilderUI界面,能够直接将所需要的模块直接拖至图中即可搭载对应的传感器,并且在Simulink中完成链接,LDW主要需要用到车道传感器,完成链接后,即可在总线中读取相应数据(车道线数,车道线ID,左右车道线距车距离,车道线曲率以及多次项的系数)用以拟合车道多项式的参数,并且将其所得数据做为数组通过numpy的计算进行运算和判断,从而优化左右车道线距离车辆的距离最终用于算法的计算去做判断。
而主要的控制信号同样封装于Simulink当中,需要从总线中读出,主要包括有throttle(油门),brake(刹车),steer(方向盘),mode(挡位),gear(齿轮)等多种控制方式,用于控制车本身的状态,并且在设计过程中考虑到部分变量需要做为全局变量用以调用,所以PanoSim在开发时候预留了八个全局变量(GlobalVariable)用于参数调用,在LDW开发过程中就是将第八个全局变量做为了报警信号交互的通道

五、LDW车道线拟合
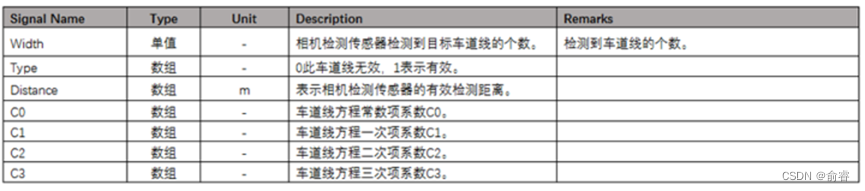
MonoDetection传感器 :Type、 Distance 、C0、 C1、 C2、 C3
车辆信息:Vx(纵向车速)、Ax(纵向加速度)、Vy(横向车速)、Ay(横向加速度)
disToLeft_0 (左侧车道线距离)
disToRight_0 (右侧车道线距离)
VX (转向车速)
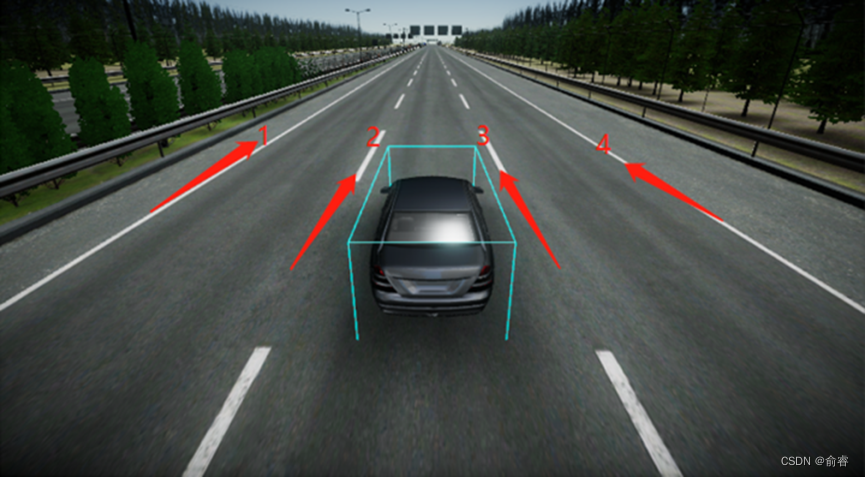
摄像头识别,4条车道线,三条车道。2、3分别是靠近主车左、右两侧的车道线,该算法封装于车道线传感器内部,用拟合多项式去计算出最近车道离车重心点的距离用于汽车偏向的判断,当然在行驶过程中自身的速度,姿态,也是LDW开发过程中的一个重要节点,所以在设计过程中也需要将车身的状态读取下来,用以下部分算法的开发当中去。
六、偏移速度计算
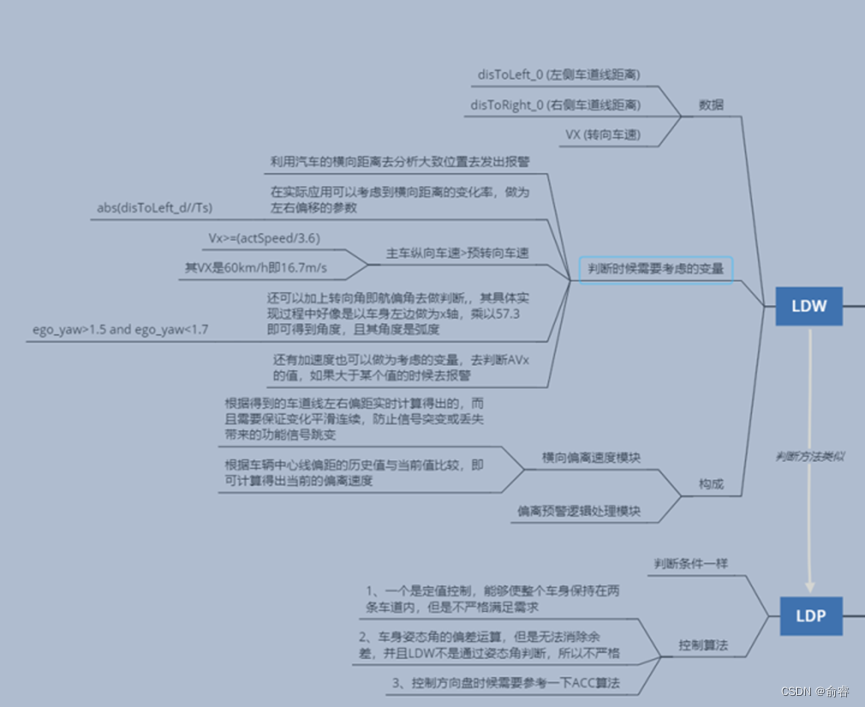
在LDW的开发过程中,经典的算法是通过车道线多项式拟合后所得到车重心距离最近车道线的左右距离做为判断变量去做决策的,但是这样的算法可能会略微简单。规范的LDW算法需要考虑车身姿态角(航偏角yaw),自身车速Vx以及在左右转向时候的变化率综合其三最终做出决策。
姿态角主要用于判断用户是否是主动转向还是无意识车头的偏移,所以在设计时候需要将车道做为y轴,而垂直于车道向右延申的直线做为x轴通过计算,如果其车身航偏角在85-95°表示是由于驾驶员无意识的偏转,而如果航偏角不在该范围内,意为用户主动控制方向盘而导致角度变化,该状态下不予以触发。
自身车速是用以判断驾驶员驾驶过程中是否达到速度阈值,如果车速小于60km/h即为16.7m/s,在安全车速中不会触发LDW,如果大于该车速下,完成其他判断条件即会触发。
转向的变化率,在原始的LDW判断当中,通过去计算车身重心距离最近车道线的左右距离去做判断,如果小于固定阈值即会触发报警,该算法应用可行性较高,触发较为精确,但是在应用中也应该考虑到车身重心距离最近车道线的变化率,将该值用于判断能够更好更灵敏的表现出其变化的效果,并且考虑到转向过程中重心的转移会导致变化率会出现负值等各种情况,在设计该部分时候,需要考虑到往某一方向偏移时候,该方向车道线的偏移量会变小,但是另一方向的偏移量会变大,因为车身呈现出一种圆形旋转的姿态,外向车轮的变化率必定大于内向车轮的变化率。
在该试验当中每次仿真回调周期Ts是10ms,该时间需要针对不同模型进行改进。其基本思想也是较为简单的通过设计disToLeft_1和disToRight_1去读取上一回调周期的偏移量,而disToLeft_0和disToRight_0读取该回调周期的偏移量,两者做差除以回调周期即可得到该回调周期的变化率通过该变化率去做判断工作。这里用到了高数中简单的导数定义式的方法去计算,其大致数学公式如下。
# 版本1.1 用距离车道偏移的距离去计算变化率
# 通过每次回调前后回调后的距离差除以回调时间就可以得到一个变化速度,该速度即可类似于转弯速度
disToLeft_1  最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 846
846

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









