







一、UART简介
UART(universal asynchronous receiver-transmitter)是一种采用异步串行通信方式的通用异步收发传输器。一般来说,UART总是和RS232成对出现,那RS232又是什么呢? RS232也就是我们计算机上的串口,它的全称是EIA-RS-232C (简称232,或者是RS232 )。其中EIA(Electronic Industry Association)代表美国电子工业协会,RS是Recommended Standard的缩写,代表推荐标准,232 是标识符,C表示修改次数,它被广泛用于计算机串行接口外设连接。如果你的计算机上还有串口的话,那么你就可以在主机箱后面看到RS232的接口:
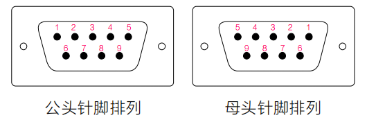
随着时代的发展,这种借口已经很少用了,取而代之的是“USB转串口”,功能和原先一样,但接口更高效了。
串口的主要功能为:在发送数据时将并行数据转换成串行数据进行传输,在接收数据时将接收到的串行数据转换成并行数据。这应该是大多数人接触电子后学习到的第一个通信协议吧。
二、通信格式
下面说明串口的具体要点:
1、传输时序
UART串口通信需要两个信号线来实现,一根用于串口发送,另外一根负责串口接收。一开始高电平,然后拉低表示开始位,接着8个数据位,然后校验位,最后拉高表示停止位,并且进入空闲状态,等待下一次的数据传输。
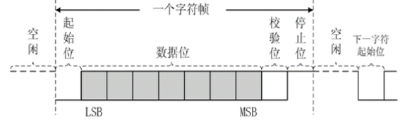
很多时候我们的校验位是允许省略的,所以协议就变成了:开始+数据+停止。

2、传输速率:波特率
串口通信的速率用波特率表示,它表示每秒传输二进制数据的位数,单位bps(位每秒)。常用的波特率有9600、19200、35400、57600以及115200等。
FPGA开发串口时设计波特率的方法:FPGA的时钟频率/波特率。例如FPGA开发板时钟频率为50Mhz,要使用的波特率为9600bps,因此需要的计数为:50000000/9600=5208;
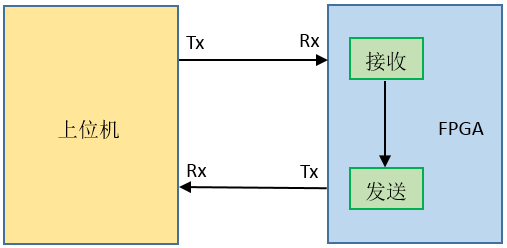
三、串口回环实验
现在用FPGA开发板做一个串口回环的实验,要求是PC端通过串口助手发送数据给FPGA,FPGA接收到数据后返回给PC端,并在串口助手处显示数值。即串口助手发什么就能收回什么。实验框图如下:
1、uart_rx
//**************************************************************************
// *** 名称 : uart_rx.v
// *** 作者 : 木子
// *** 日期 : 2024-05-13
// *** 描述 : 串口接收模块,计数9.5下,其中停止位0.5下
// 因为串口助手发送本次停止位和下次开始位中间没有留空闲位
// 若计满10下,则才结束本次传输下次数据就来了,会来不及接收
//**************************************************************************
module uart_rx
//========================< 参数 >==========================================
#(
parameter CLK = 50_000_000 , //系统时钟,50Mhz
parameter BPS = 9600 , //波特率
parameter BPS_CNT = CLK/BPS //波特率计数
)
//========================< 端口 >==========================================
(
input wire clk , //时钟,50Mhz
input wire rst_n , //复位,低电平有效
input wire din , //输入数据
output reg [7:0] dout , //输出数据
output reg dout_vld //输出数据的有效指示
);
//========================< 信号 >==========================================
reg rx0 ;
reg rx1 ;
reg rx2 ;
wire rx_en ;
reg flag ;
reg [15:0] cnt0 ;
wire add_cnt0 ;
wire end_cnt0 ;
reg [ 3:0] cnt1 ;
wire add_cnt1 ;
wire end_cnt1 ;
reg [ 7:0] data ;
//==========================================================================
//== 消除亚稳态 + 下降沿检测
//==========================================================================
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
rx0 <= 1;
rx1 <= 1;
rx2 <= 1;
end
else begin
rx0 <= din;
rx1 <= rx0;
rx2 <= rx1;
end
end
assign rx_en = rx2 && ~rx1;
//==========================================================================
//== 接收状态指示
//==========================================================================
always @(posedge clk or negedge rst_n) begin
if(!rst_n)
flag <= 0;
else if(rx_en)
flag <= 1;
else if(end_cnt1)
flag <= 0;
end
//==========================================================================
//== 波特率计数
//==========================================================================
always @(posedge clk or negedge rst_n) begin
if(!rst_n)
cnt0 <= 0;
else if(add_cnt0) begin
if(end_cnt0)
cnt0 <= 0;
else
cnt0 <= cnt0 + 1;
end
end
assign add_cnt0 = flag;
assign end_cnt0 = cnt0== BPS_CNT-1 || end_cnt1;
//==========================================================================
//== 开始1位(不接收) + 数据8位 + 停止0.5位(不接收),共10位
//==========================================================================
always @(posedge clk or negedge rst_n) begin
if(!rst_n)
cnt1 <= 0;
else if(add_cnt1) begin
if(end_cnt1)
cnt1 <= 0;
else
cnt1 <= cnt1 + 1;
end
end
assign add_cnt1 = end_cnt0;
assign end_cnt1 = cnt1==10-1 && cnt0==BPS_CNT/2-1;
//==========================================================================
//== 缓存数据
//==========================================================================
always @ (posedge clk or negedge rst_n)begin
if(!rst_n)
data <= 8'd0;
else if(cnt1>=1 && cnt1<=8 && cnt0==BPS_CNT/2-1) //中间采样
data[cnt1-1] <= rx2; //或 dout <= {rx2,dout[7:1]};
end
//==========================================================================
//== 输出数据
//==========================================================================
always @ (posedge clk or negedge rst_n)begin
if(!rst_n)
dout <= 0;
else if(end_cnt1)
dout <= data;
end
always @ (posedge clk or negedge rst_n)begin
if(!rst_n)
dout_vld <= 0;
else if(end_cnt1)
dout_vld <= 1;
else
dout_vld <= 0;
end
endmodule
2、uart_tx
//**************************************************************************
// *** 名称 : uart_tx.v
// *** 作者 : 木子
// *** 日期 : 2024-05-13
// *** 描述 : 串口接收模块,计数9.5下,其中停止位0.5下
// 因为极端情况是本次停止位和下次开始位中间没有留空闲位
// 若计满10下,则才结束本次传输下次数据就来了,会来不及发送
//**************************************************************************
module uart_tx
//========================< 参数 >==========================================
#(
parameter CLK = 50_000_000 , //系统时钟,50Mhz
parameter BPS = 9600 , //波特率
parameter BPS_CNT = CLK/BPS //波特率计数
)
//========================< 端口 >==========================================
(
input wire clk , //时钟,50Mhz
input wire rst_n , //复位,低电平有效
input wire [7:0] din , //输入数据
input wire din_vld , //输入数据的有效指示
output reg dout //输出数据
);
//========================< 信号 >==========================================
reg flag ;
reg [ 7:0] din_tmp ;
reg [15:0] cnt0 ;
wire add_cnt0 ;
wire end_cnt0 ;
reg [ 3:0] cnt1 ;
wire add_cnt1 ;
wire end_cnt1 ;
wire [ 9:0] data ;
//==========================================================================
//== 数据暂存(din可能会消失,暂存住)
//==========================================================================
always @ (posedge clk or negedge rst_n) begin
if(!rst_n)
din_tmp <=8'd0;
else if(din_vld)
din_tmp <= din;
end
//==========================================================================
//== 发送状态指示
//==========================================================================
always @(posedge clk or negedge rst_n)begin
if(!rst_n)
flag <= 0;
else if(din_vld)
flag <= 1;
else if(end_cnt1)
flag <= 0;
end
//==========================================================================
//== 波特率计数
//==========================================================================
always @(posedge clk or negedge rst_n) begin
if(!rst_n)
cnt0 <= 0;
else if(add_cnt0) begin
if(end_cnt0)
cnt0 <= 0;
else
cnt0 <= cnt0 + 1;
end
end
assign add_cnt0 = flag;
assign end_cnt0 = cnt0== BPS_CNT-1 || end_cnt1;
//==========================================================================
//== 开始1位 + 数据8位 + 停止0.5位,共10位
//==========================================================================
always @(posedge clk or negedge rst_n) begin
if(!rst_n)
cnt1 <= 0;
else if(add_cnt1) begin
if(end_cnt1)
cnt1 <= 0;
else
cnt1 <= cnt1 + 1;
end
end
assign add_cnt1 = end_cnt0;
assign end_cnt1 = cnt1==10-1 && cnt0==BPS_CNT/2-1;
//==========================================================================
//== 数据输出(用case语句也行)
//==========================================================================
assign data = {1'b1,din_tmp,1'b0}; //停止,数据,开始
always @(posedge clk or negedge rst_n) begin
if(!rst_n)
dout <= 1'b1;
else if(flag)
dout <= data[cnt1];
end
endmodule
3、top层
//**************************************************************************
// *** 名称 : uart_top.v
// *** 作者 : 木子
// *** 日期 : 2024-08-10
// *** 描述 : 串口实验顶层文件
//**************************************************************************
module uart_top
//========================< 端口 >==========================================
(
input wire clk , //时钟,50Mhz
input wire rst_n , //复位,低电平有效
input wire uart_rx , //FPGA通过串口接收的数据
output wire uart_tx //FPGA通过串口发送的数据
);
//========================< 连线 >==========================================
wire [7:0] data ;
wire data_vld ;
//==========================================================================
//== 模块例化
//==========================================================================
uart_rx
#(
.BPS_CNT (52 ) //仿真用
)
u_uart_rx
(
.clk (clk ),
.rst_n (rst_n ),
.din (uart_rx ),
.dout (data ),
.dout_vld (data_vld )
);
uart_tx
#(
.BPS_CNT (52 ) //仿真用
)
u_uart_tx
(
.clk (clk ),
.rst_n (rst_n ),
.din_vld (data_vld ),
.din (data ),
.dout (uart_tx )
);
endmodule四、仿真调试
1、testbench
`timescale 1ns/1ps //时间精度
`define Clock 20 //时钟周期
module uart_top_tb;
//========================< 端口 >==========================================
reg clk ; //时钟,50Mhz
reg rst_n ; //复位,低电平有效
reg uart_rx ;
wire uart_tx ;
//==========================================================================
//== 模块例化
//==========================================================================
uart_top u_uart_top
(
.clk (clk ),
.rst_n (rst_n ),
.uart_rx (uart_rx ),
.uart_tx (uart_tx )
);
//==========================================================================
//== 时钟信号和复位信号
//==========================================================================
initial begin
clk = 1;
forever
#(`Clock/2) clk = ~clk;
end
initial begin
rst_n = 0; #(`Clock*20+1);
rst_n = 1;
end
//==========================================================================
//== task任务
//==========================================================================
reg [7:0] mem[15:0] ; //位宽为8,深度为16个数据
integer i ;
integer j ;
//读取外部数据
initial $readmemh("./data.txt",mem);
//位赋值
task rx_bit
(
input [7:0] data
);
begin
for(i=0;i<=9;i=i+1) begin //10个bit为
case(i)
0: uart_rx = 1'b0;
1: uart_rx = data[i-1];
2: uart_rx = data[i-1];
3: uart_rx = data[i-1];
4: uart_rx = data[i-1];
5: uart_rx = data[i-1];
6: uart_rx = data[i-1];
7: uart_rx = data[i-1];
8: uart_rx = data[i-1];
9: uart_rx = 1'b1;
endcase
#1040; //一个完整波特延时:52*20=1040
end //考虑到空闲位,也可以设置得1040稍大一些
end
endtask
//字节赋值
task rx_byte;
begin
for(j=0;j<=15;j=j+1) //16个byte数据
rx_bit(mem[j]);
end
endtask
//==========================================================================
//== 调用task
//==========================================================================
initial begin
#(`Clock*20+1);
rx_byte();
end
initial begin
#180000;
$stop;
end
endmodule2、data.txt
testbench中调用了一个 data.txt 文本文档,里面存储了此次仿真的16个数据,将其放置到 Modelsim 软件的工程目录中(非 work)即可。
0 1 2 3 4 5 6 7 8 9 a b c d e f
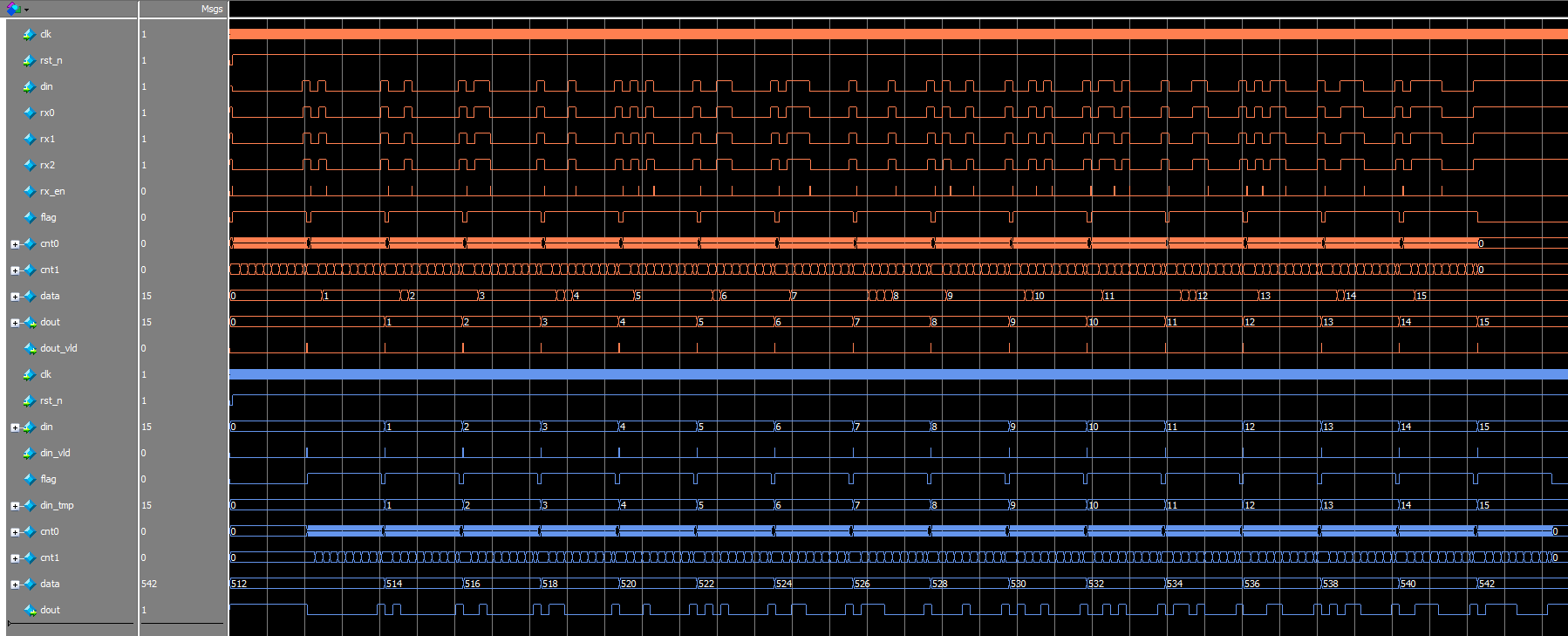
3、仿真波形
由波形可以看到,本次设计应该是成功的。















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









