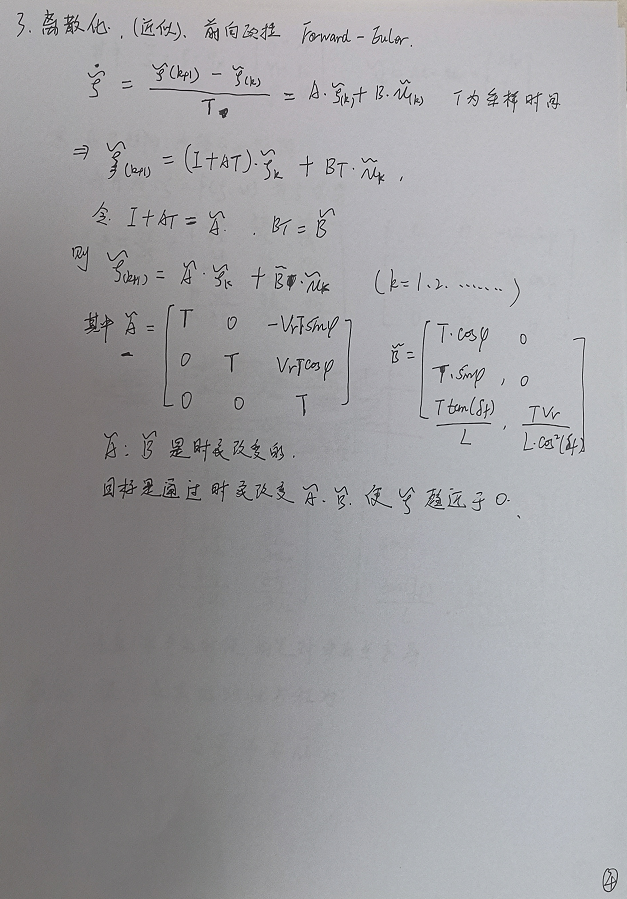
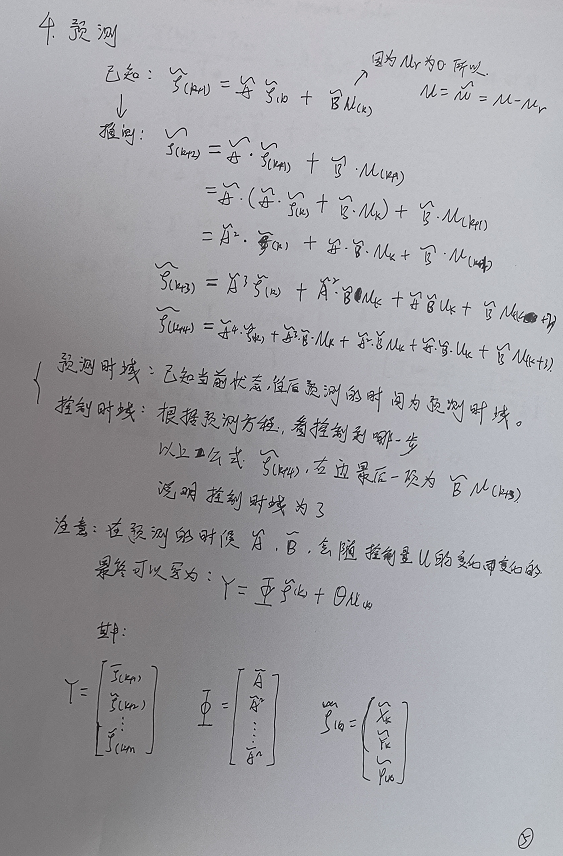
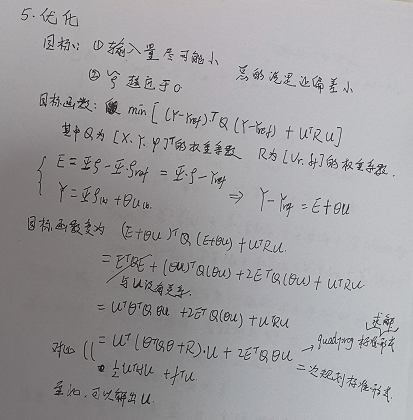
模型预测控制推导(MPC)
最新推荐文章于 2024-06-29 18:41:32 发布

 2616
864
9222
673
2616
864
9222
673











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言