







 本文介绍了点云数据处理中的核心问题,包括如何通过KD-Tree和Octree建立离散点间的拓扑关系,以及这两种数据结构在高维空间中的应用,重点讲解了KD-Tree的构建原理、递归划分过程和Octree的构建步骤,以及它们在近邻搜索中的作用。
本文介绍了点云数据处理中的核心问题,包括如何通过KD-Tree和Octree建立离散点间的拓扑关系,以及这两种数据结构在高维空间中的应用,重点讲解了KD-Tree的构建原理、递归划分过程和Octree的构建步骤,以及它们在近邻搜索中的作用。
点云数据主要是表征目标表面的海量点集合,并不具备传统实体网格数据的集合拓扑信息。因此,如何建立离散点间的拓扑关系,实现基于邻域关系的快速查找也是点云数据处理中比较核心的问题。对于一维数据来说,典型的树形存储结构如Binary Search Tree(BST),特点在于:对于树中的每个节点,其左子树中的所有节点的值都小于该节点的值,而右子树中的所有节点的值都大于该节点的值,即中序遍历是有序的。这种结构在执行搜索操作时效率较高,在平均情况下,如果树保持相对平衡,BST 的时间复杂度为 O(log n)。
对于高维数据,同样可以采用这种自顶向下逐级划分数据的空间索引结构,如三维数据中比较常见的KD-Tree和Octree。本节主要是学习理解KD-Tree/Octree的构建以及近邻搜索原理,仅作为学习记录!
1. KD-Tree
k-d tree,也称 k 维树,是对数据点在 k 维空间(如二维-xy,三维-xyz,K维-xyz…k)中划分的一种数据结构,主要应用于多维空间数据的搜索(如最近邻搜索、范围搜索)。k-d tree 的每一级在指定维度上(如 x 轴)分开了所有的子节点,在该维度上,小于根节点的部分划分为左子树,大于根节点的部分划分到右子树,所以本质上也是一种带有约束条件的二分查找树。
1.1 KD-Tree的构建
基本思想:采用分而治之的思想,根据数据特征选择一个合适的维度作为切分维度,并根据该维度的中位数作为切分值,进而根据切分维度和切分值,将数据点分割成两个子集,左子集包含小于等于切分值的数据点,右子集包含大于切分值的数据点,直到所有数据都切分完成。
经典的构造KD-Tree的方式如下:
- 给定初始化坐标轴,作为根节点分割超平面的法向量。如3-d tree,根节点通常选取为 X 轴;
- 随着树的深度的增加,循环的选取坐标轴,作为分割超平面的法向量,如3-d tree,根节点的左右子树选取 Y 轴,左右子树的下一级选择 Z 轴,再下一级选择 X轴,依次类推;
- 每次在进行当前节点的左右子树切分时,可以选择该维度上数据的中位数作为切分点。

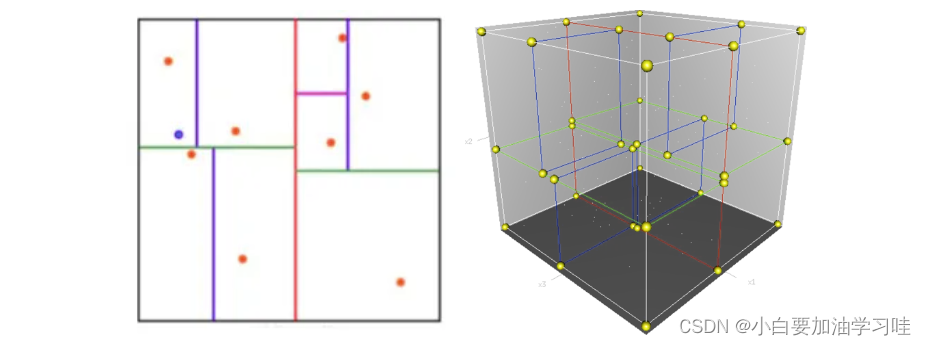
如上图所示,每个非叶子节点都可以想象成一个分割超平面,用垂直于坐标轴的超平面将空间分成两个部分,不断对数据进行递归划分,直到所有数据都切分完成。对于n个实例的k维数据来说,KD-Tree构建的时间复杂度在O(n logn) - O(n log n log n)不等;
1.2 代码练习
这部分依然以三维数据作为输入进行代码练习。切分点使用当前维度上数据的均值来代替中值,切分超平面采用xyz轴轮转的形式。主要流程如下:
- 输入部分:原始三维数据,叶子节点最少点数
- 输出部分:kd-tree的根节点
- 处理步骤:
- 输入三维数据,根据切分维度选择切分点进行左右子树切分;
- 采用循环选取坐标轴的方式,递归构建左右子树;
- 不断递归划分直到所有数据都切分完成。
#pragma once
#include <memory>
#include <vector>
#include <Eigen/Dense>
#include <Eigen/Core>
// 定义KD-Tree的基础节点
typedef struct KDTreeNode{
int axis; // 切分轴
double key; // 切分点
bool is_leaf; // 是否为叶子节点
std::vector<int> value_indices; // 当前节点内存放的数据索引
std::shared_ptr<KDTreeNode> left; // 左节点
std::shared_ptr<KDTreeNode> right; // 右节点
KDTreeNode(): axis(-1), key(0), is_leaf(false) {}
KDTreeNode(int axis_): axis(axis_), key(0), is_leaf(false) {}
} KDTreeNode;
// 定义KD-Tree
// 属性:根节点、点云数据
// 方法:点云数据初始化、构建KD-Tree(对外接口)、递归构建KD-Tree(对内接口)、获取根节点
// 辅助方法:获取数据当前节点的切分信息(key,value_indices,左子树索引、右子树索引),获取切分轴
class KDTree{
public:
void set_data(const Eigen::MatrixXd& input_data); // 输入数据
bool create_kd_tree(int leaf_size); // 构建KD-Tree(外部接口)
std::shared_ptr<KDTreeNode> get_root(); // 获取KD-Tree的根节点(外部接口)
private:
// 递归构建KD-Tree
// 输入:需要构建的节点、原始数据、待构建的点索引、切分轴、叶子节点最少点数
bool create_kd_tree_recursive(std::shared_ptr<KDTreeNode>& root,
const Eigen::MatrixXd& values,
std::vector<int>& value_indives,
int axis,
int leaf_size);
// 获取构建当前节点需要的分割数据
// 输入:原始数据、待构建的点索引、切分轴
// 输出:切分值、切分值对应的索引、切分后的左节点索引、切分后的右节点索引
bool get_median_key_and_left_right_value_indices_maxmin(
const Eigen::MatrixXd& values,
const std::vector<int> value_indives,
int axis,
double& median_key,
std::vector<int>& median_value_indices,
std::vector<int>& left_value_indices,
std::vector<int>& right_value_indices);
int get_next_axis(int axis, int dim);
private:
Eigen::MatirxXd _data;
std::shared_ptr<KDTreeNode> _root;
};
#include "KD_Tree.h"
void KDTree::set_data(const Eigen::MatrixXd& input_data){
_data = input_data;
}
std::shared_ptr<KDTreeNode> KDTree::get_root(){
return _root;
}
bool KDTree::create_kd_tree(int leaf_size){
// 构建数据的索引列表
std::vector<int> value_indices;
for(size_t i = 0; i < _data.cols(); ++i){
value_indices.emplace_back(i);
}
return create_kd_tree_recursive(_root, _data, value_indices, 0, leaf_size);
}
bool KDTree::create_kd_tree_recursive(std::shared_ptr<KDTreeNode>& root,
const Eigen::MatrixXd& values,
std::vector<int> value_indives,
int axis,
int leaf_size){
// 判断当前节点是否为空
if(root == nullptr){
root.reset(new KDTreeNode(axis));
}
// 判断是否需要切分
if(value_indives.size() > leaf_size){
double median_key;
std::vector<int> median_value_indices, left_value_indices, right_values_indices;
get_median_key_and_left_right_value_indices_maxmin(values, value_indives, axis,
median_key, median_value_indices, left_value_indices, right_values_indices);
// 构建当前节点
root->is_leaf = false;
root->key = median_key;
root->value_indices = median_value_indices;
// 构建左右子树
int next_axis = get_next_axis(axis, values.rows());
create_kd_tree_recursive(root->left, values, left_value_indices, next_axis, leaf_size);
create_kd_tree_recursive(root->right, values, right_value_indices, next_axis, leaf_size);
}else{
root->is_leaf = true;
root->value_indices = value_indives;
}
return true;
}
bool KDTree::get_median_key_and_left_right_value_indices_maxmin(
const Eigen::MatrixXd& values,
const std::vector<int> value_indives,
int axis,
double& median_key,
std::vector<int>& median_value_indices,
std::vector<int>& left_value_indices,
std::vector<int>& right_value_indices){
// 获取均值
Eigen::VectorXd tmp_values(value_indives.size());
for(int i = 0; i < value_indives.size(); ++i){
tmp_values(i) = values(axis, value_indives[i]);
}
double max = tmp_values.maxCoeff();
double min = tmp_values.minCoeff();
if(max > min){
median_key = min + (max - min) / 2;
// 遍历所有点划分索引区分
for(int i = 0; i < value_indives.size(); ++i){
if(tmp_values(i) == median_key){
median_value_indices.emplace_back(value_indives[i]);
}else if(tmp_values(i) < median_key){
left_value_indices.emplace_back(value_indives[i]);
}else{
right_value_indices.emplace_back(value_indives[i]);
}
}
}else{
median_key = min;
int median_idx = floor(value_indives.size() / 2);
median_value_indices = std::vector<int>(
value_indices.begin() + median_idx, value_indices.begin() + median_idx + 1);
left_value_indices = std::vector<int>(
value_indices.begin(), value_indices.begin() + median_idx);
right_value_indices = std::vector<int>(
value_indices.begin() + median_idx + 1, value_indices.end());
}
return true;
}
int KDTree::get_next_axis(int axis, int dim){
if(axis >= dim -1){
return 0;
}else{
return axis + 1;
}
}
1.3 代码测试
#inlcude "KD_Tree.h"
int main(){
Eigen::MatrixXd data(3, 4);
data << 1, 2, 3, 4,
1, 2, 1, 2,
0, 1, 2, 3;
KDTree kd_tree;
kd_tree.input(data);
kd_tree.create_kd_tree(1);
return 0;
}
2. Octree
八叉树结构是 Hunter 博士于 1978 年首次提出的一种数据模型,通过循环递归的划分方法对大小为2n x 2n x 2n 的三维空间的几何对象进行划分,从而构成一个具有根节点的方向图。如下图所示:
2.1 Octree的构建
基本思想:基于设定的最短分割长度或最少数据约束,以数据的最大尺寸构建根节点,递归地将数据切分到八个子立方体中,直到所有数据都切分完成。
Octree的构建原理及一般步骤如下:
- 设定递归终止条件:首先,需要设定子节点的最短分割长度和最少数量约束,也就是细分过程的终止条件;
- 确定初始立方体:找出场景中的最大尺寸,并以此尺寸建立一个初始的立方体(根节点);
- 分配单位元素:将场景中的单位元元素(如点云数据中的点)丢入能被包含且没有子节点的立方体中;
- 递归细分:如果当前立方体没有达到递归终止条件,就继续细分;
- 检查细分条件:在细分过程中,如果发现某个子立方体所分配到的元素数量小于leaf_size或者立方体尺寸小于最短分割长度,则停止细分;
- 重复细分过程:我们继续对满足细分条件的子立方体进行上述的细分过程,直到达到设定的最大递归深度;

2.2 代码练习
这部分依然以三维数据作为输入进行代码练习。Octree构建的主要流程如下:
- 输入部分:原始三维数据,叶子节点最少点数,最短分割长度;
- 输出部分:octree的根节点
- 处理步骤:
- 输入三维数据,根据数据的包围框及数据的中心点进行立方体的细分;
- 检查细分条件,若满足停止切分;若不满足则继续进行子节点立方体的细分;
- 不断细分直到所有数据都切分完成。
#pragma once
#include <memory>
#include <vector>
#include <Eigen/Dense>
#include <Eigen/Core>
// 定义Octree的基础节点
typedef struct Octant{
Eigen::Vector3d center;
double extent;
std::vector<u_int> value_indices;
bool is_leaf;
std::shared_ptr<Octant> children[8];
Octant(){}
Octant(const Eigen::Vector3d& center_, double extent_, const std::vector<u_int> value_indices_, bool is_leaf_)
: center(center_), extent(extent_), value_indices(value_indices_), is_leaf(is_leaf_){}
}Octant;
// 定义KD-Tree
// 属性:根节点、点云数据、叶子节点最少点数、叶子节点最短分割长度
// 方法:点云数据初始化、构建Octree(对外接口)、递归构建Octree(对内接口)
class Octree{
public:
void set_data(const Eigen::MatrixXd& input_data);
bool build(int leaf_size, double min_length);
std::shared_ptr<Octant> get_root();
private:
// 递归构建子节点
// 输入:需要构建的节点、点云数据、待分配的数据索引、立方体中心,立方体扩展长度
build build_octree_recursive(std::shared_ptr<Octant>& root,
const Eigen::MatirxXd& values,
const std::vector<u_int>& value_indices,
const Eigen::Vector3d& center,
double extent);
private:
Eigen::MatrixXd _data;
std::shared_ptr<Octant> _root;
// 子节点细分终止条件
int _leaf_size;
double _min_extent;
};
#include "Octree.h"
#include <map>
void Octree::set_data(const Eigen::MatrixXd& input_data){
_data = input_data;
}
std::shared_ptr<Octant> Octree::get_root(){
return _root;
}
bool Octree::build(int leaf_size, double min_length){
_leaf_size = leaf_size;
_min_extent = min_length / 2;
// 计算立方体中心点
Eigen::Vector3d max_value = _data.rowwise().maxCoeff();
Eigen::Vector3d min_value = _data.rowwise().minCoeff();
Eigen::Vector3d center = min_value + (max_value - min_value) / 2;
double extent = (max_value - min_value).maxCoeff() / 2;
// 获取需要细分的数据索引
std::vector<u_int> value_indices;
for(size_t i = 0; i < _data.cols(); ++i){
value_indices.emplace_back(i);
}
// 递归构建Octree
return build_octree_recursive(_root, _data, value_indices, center, extent);
}
build Octree::build_octree_recursive(std::shared_ptr<Octant>& root,
const Eigen::MatirxXd& values,
const std::vector<u_int>& value_indices,
const Eigen::Vector3d& center,
double extent){
// 判断索引列表是否为空
if(value_indices.size() == 0){
return false;
}
// 判断当前节点是否为空
if(root == nullptr){
root.reset(center, extent, value_indices, false);
}
// 判断是否需要细分
if(value_indices.size() < _leaf_size || extent < _min_extent){
root->is_leaf = true;
}else{
// 计算每个点所属子节点
std::map<u_char, std::vector<u_int>> children_value_indices;
for(size_t i = 0; i < value_indices.size(); ++i){
u_char morton_mode = 0;
const Eigen::Vector3d& value_tmp = values.col(value_indices[i]);
if(value_tmp(0) > center(0)) morton_mode |= 1;
if(value_tmp(1) > center(1)) morton_mode |= 2;
if(value_tmp(2) > center(2)) morton_mode |= 4;
children_value_indices[morton].emplace_back(value_indices[i]);
}
// 递归构建子节点
double factor[2] = {-0.5, 0.5};
for(int i = 0; i < 8; ++i){
Eigen::Vector3d child_center;
child_center(0) = center[0] + factor[int((i & 1) > 0)] * extent;
child_center(1) = center[1] + factor[int((i & 2) > 0)] * extent;
child_center(2) = center[2] + factor[int((i & 4) > 0)] * extnet;
double child_extent = 0.5 * extent;
build_octree_recursive(root->children[i], values,
children_value_indices[i], child_center, child_extent);
}
return true;
}
2.3 代码测试
#include "Octree.h"
int main(){
Eigen::MatrixXd data(3, 4);
data << -1, 1, -1, 1,
-1, -1, 1, 1,
0, 0, 0, 0;
Octree oct;
oct.set_data(data);
oct.build(1, 1);
return 0;
}
















 915
915











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









