







前言
当前各家伺服厂家在宣传其伺服驱动器产品时,为了展现其伺服驱动器性能卓越,都会提到一个参数——速度环带宽(Hz)或速度环采样周期(us),该参数是伺服控制系统中衡量动态响应速度与稳定性的核心参数。伺服驱动器需要尽量快速、准确的驱动电机,以跟踪来自上位机或内部设定的指令。高的速度环带宽意味着系统对速度指令变化的响应更快,能够有效降低跟踪误差。
速度环采样周期及速度环带宽
伺服系统一般为串级控制回路,由三个控制环路组成,从外向内依次是位置环、速度环、电流环嵌套组成。基本的控制框图如下图所示:
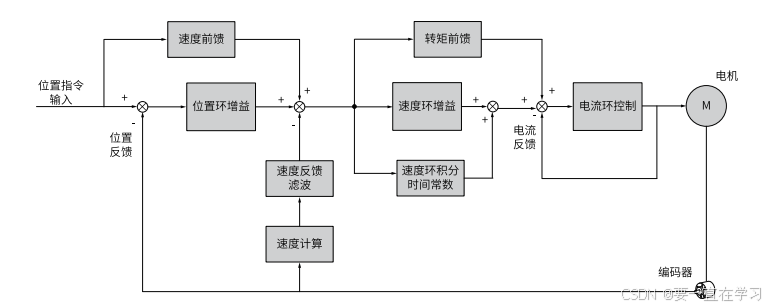
电流环(最内环):直接控制电机转矩,通过实时调整定子电流的幅值和相位实现快速相应,电流环的带宽最高(通常为速度环的5-10倍)。
速度环(中间环):通过调整电机转速实现目标速度跟踪,速度环的带宽介于电流环和速度环z之间。
位置环(最外层):接受位置指令,通过速度环间接调整电机位置。位置环带宽最低,但需要确保稳态精度。
其中,电流环的采样周期通常与PWM周期同步(在PWM波形的上升沿与下降沿均进行电流采样)。而当前伺服驱动器的IGBT输出的PWM频率一般为4KHz(通常有密码保护,可设置频率到16KHz或以上。但加大PWM频率会导致IGBT发热显著增加,可能会降低功率输出)。因此,一般电流环采样周期为62.5us,采样频率为8KHz。
当前优异的伺服驱动器通常宣称其速度环采样周期在125us(甚至更小)。以速度环采样周期为125us为例,其采样频率为8KHz(采样频率为采样周期的倒数)。
根据香农采样定理,系统的理论最高带宽应低于采样频率的一半。香农采样定理指出:为了不失真地恢复原始连续信号,采样频率必须至少为信号最高频率的两倍,若采样频率低于此阈值,则会出现混叠现象,导致高频信号被错误地重建为低频信号。即速度环的带宽理论上最高为4KHz,但实际应用中,受控制算法延迟、反馈元件的分辨率、负载与电机之间的惯量比、以及电机与负载之间耦合的刚性等都会影响其最大可实现的响应带宽,因此实际带宽远低于此值 。
按照国标,速度环带宽是指系统对正弦输入信号的跟随能力,定义为输出幅值衰减至-3dB(约70.7%幅值)时对应的频率上限。测量时需向速度环输入频率递增的正弦信号,观察电机实际转速响应的相位滞后和幅值衰减情况。但实际上,当前没有一个针对该参数指标的标准测试平台(电机带标准的负载)。因此,在厂家标定该参数时,通常可能都是基于理论计算或用小电机光轴测试。
根据经验公式:
速度环带宽()=
其中:
G为转动惯量比(通常设定为);
为负载惯量,
为电机转子惯量;
为速度环增益(Hz)。
当时,公式简化为:带宽(Hz)=
因此,速度环增益即速度环带宽的近似值。
需要注意的是,驱动器的高带宽也可能会给伺服系统带来一些负面影响。比如:高带宽也会让电机对来自负载和传动系统的扰动变得十分敏感;另外,高带宽会让电机以更高的频率去响应负载的波动,这就对系统的动力性能(如:加速度、扭矩和力)提出了更高的要求。
考虑到功耗与力(力矩)之间是平方的关系,因此带宽的增加会显著增加电机的功耗(即热量),从而带来电机温度的升高;而由于温升是确保电机正常运行的一项关键因素,所以,事实上电机特性很有可能会对伺服驱动器实际的带宽产生一定程度的限制作用。
总结
在实际的常规应用中,可能会发现伺服驱动器的带宽实际上并不是一个重要因素,而产品的功能的丰富性、易用性以及鲁棒性往往才是客户选择的决定性因素。当然,如果伺服驱动器的带宽过低,在应用层面上还是会体现。
受个人能力所限,难免存在疏漏,诚盼斧正。

















 1358
1358

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









