







目录
.1 简介
control看到下面的图中就是mjtNum类型
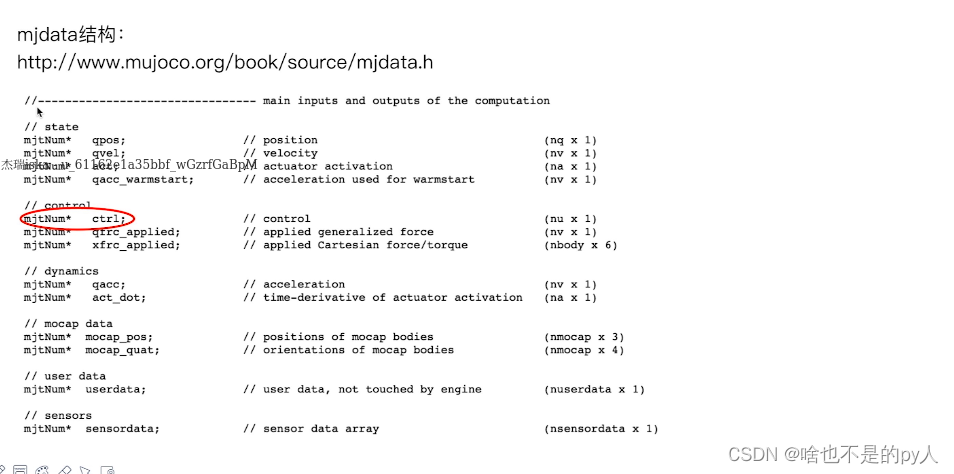
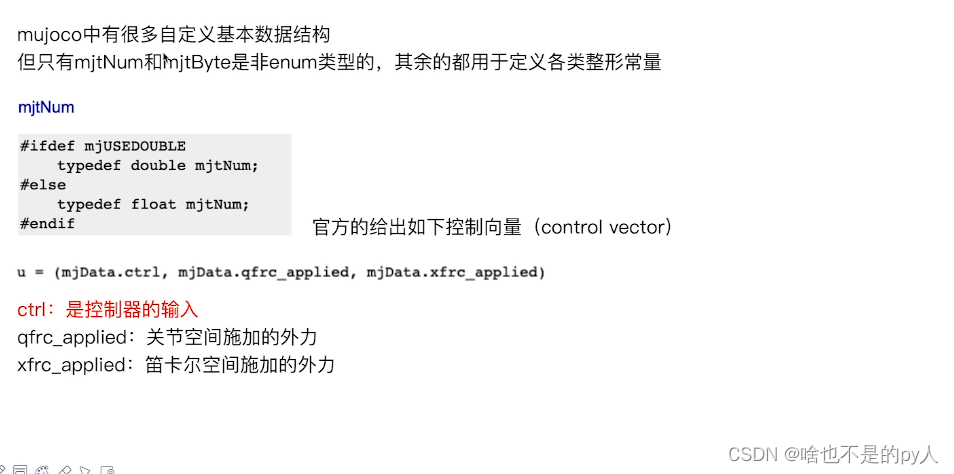
mjtNum实际上就是浮点数
ctrl是底层的输入
外界扰动就是通过上图的qfrc和xfrc来添加的
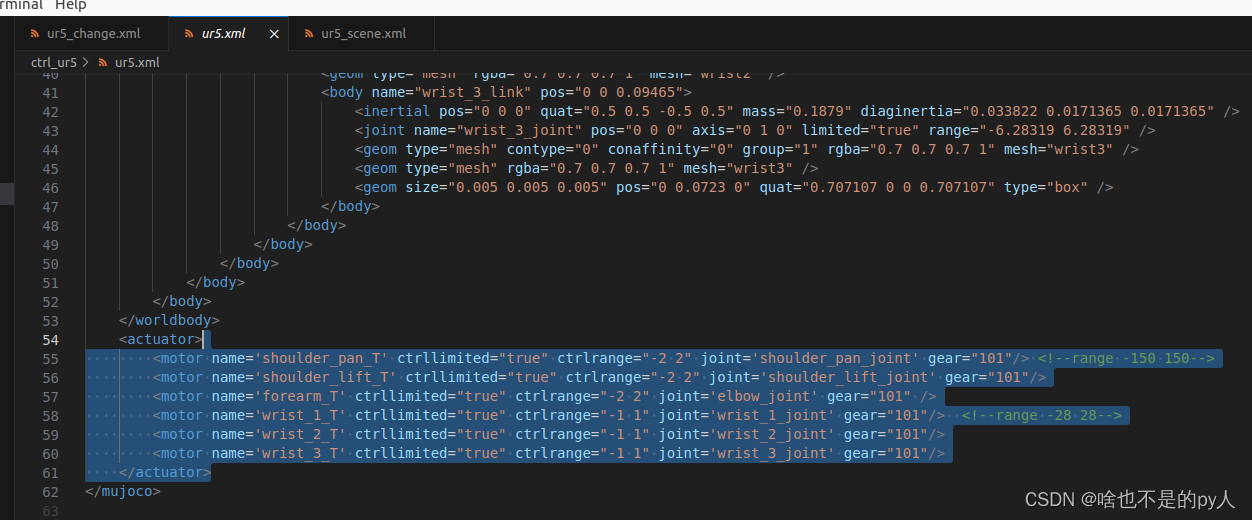
1.1 控制器实现
实际上加上控制器就是xml里添加actuator
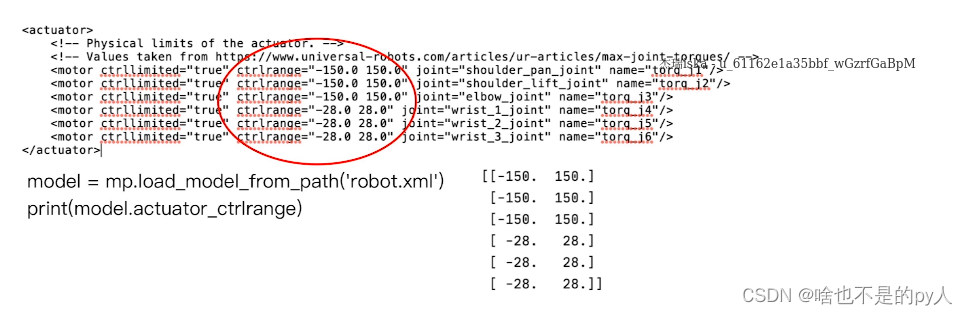
joint就是对应由哪个电机控制
motor代表电机
ctrllimited代表的是电机的转动范围有限

这里说明了mujoco的逻辑 是siso就是单输入得到单输出
需要注意的是输入都被保存在变量mjData.ctrl的变量里
force outputs保存在另一个变量里
.2 sim.step()
这个函数做了什么
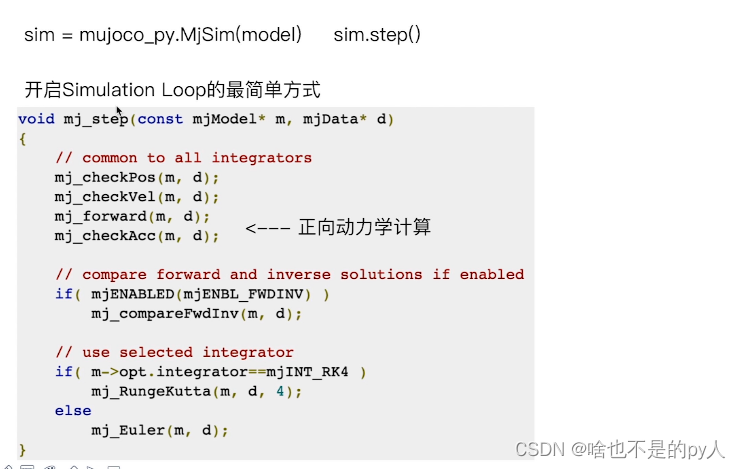
先是检查参数是否在范围内
然后进行正向动力学的计算(位置速度来计算加速度)
然后检查加速度是不是合理的状态
然后进行差分迭代
最后是一个积分器,欧拉积分器
在一个while循环中添加每一步的控制量,再写一个step就可以开始循环这个函数很方便
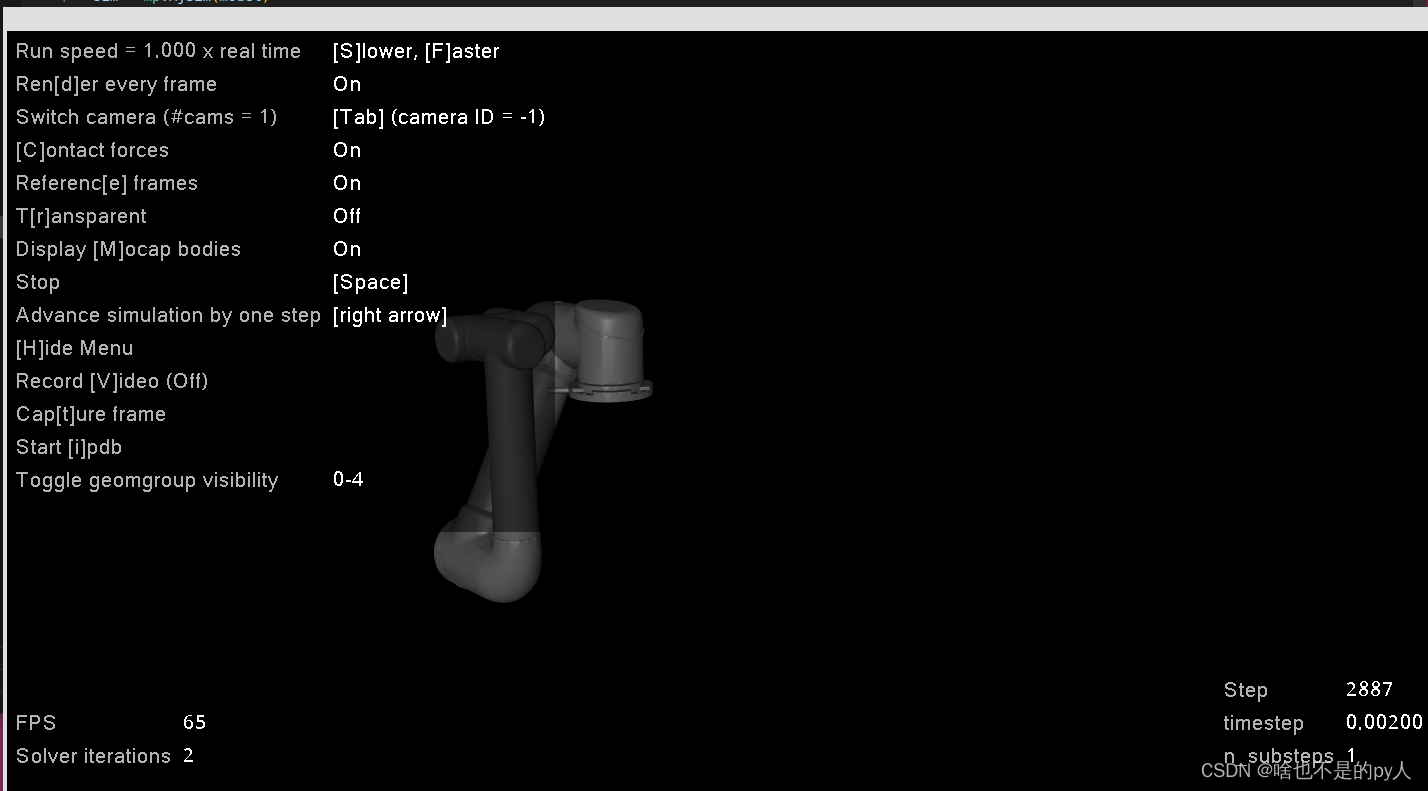
.3 实例
import mujoco_py as mp
model = mp.load_model_from_path('ur5.xml')
sim = mp.MjSim(model)
viewer = mp.MjViewer(sim)
for i in range(3000):
# sim.data.ctrl[:6] = 1
sim.step()
viewer.render()先是读取了ur5的model
ur5的model里添加了相应的actuator
然后建立Mjsim的仿真并传入viewer中显示
sim = mp.MjSim(model)
viewer = mp.MjViewer(sim)
然后开启循环
for i in range(3000):
# sim.data.ctrl[:6] = 1
sim.step()
viewer.render()把每个关节的控制输入给到1
sim.data.ctrl[:6] = 1然后step开始输出
输出完之后进行render
完整代码:
import mujoco_py as mp
model = mp.load_model_from_path('ur5.xml')
sim = mp.MjSim(model)
viewer = mp.MjViewer(sim)
for i in range(3000):
sim.data.ctrl[:6] = 1
sim.step()
viewer.render()运行
.4 连杆模型编写
先是link1
<mujoco>
<worldbody>
<light diffuse=".5 .5 .5" pos="0 0 3" dir="0 0 -1"/>
<geom type="plane" size="1 1 0.1" rgba=".9 0 0 1"/>
<body pos="0 0 0" euler="0 0 0">
<joint type="free"/>
<geom type="box" size=".1 .1 .3" rgba="0 .9 0 1"/>
</body>
</worldbody>
</mujoco>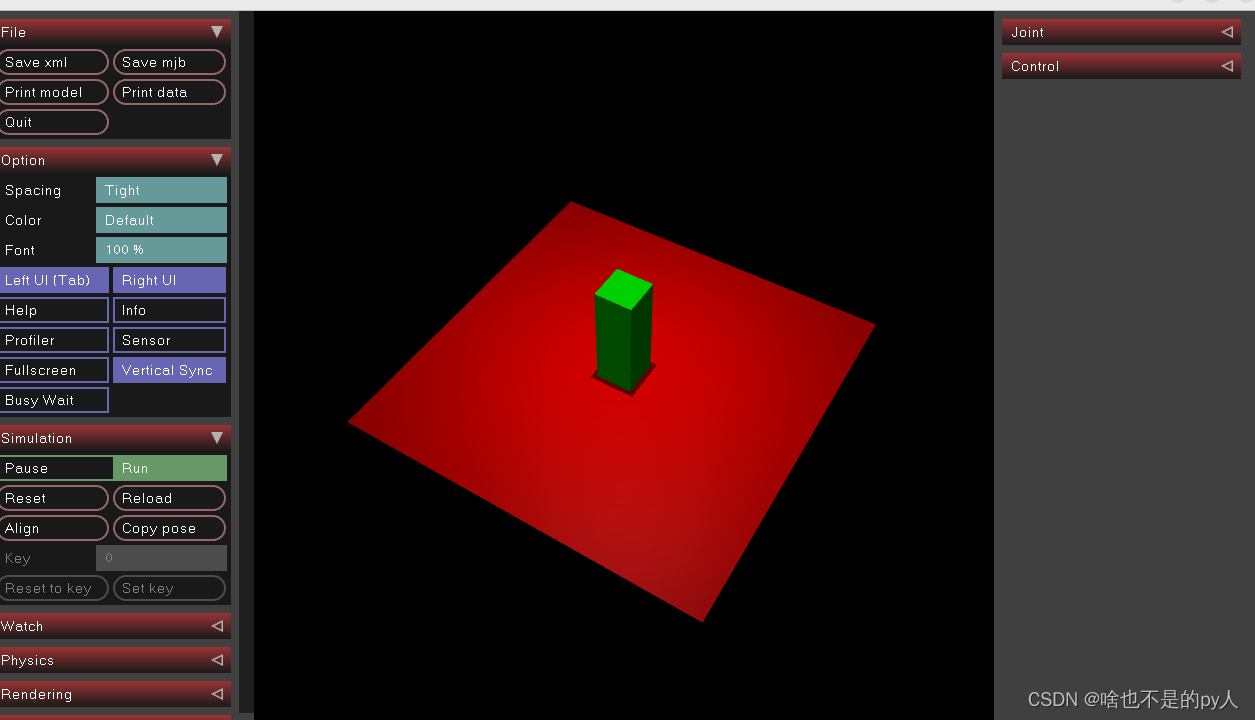
先是写一个带joint的双连杆
<mujoco>
<worldbody>
<light diffuse=".5 .5 .5" pos="0 0 3" dir="0 0 -1"/>
<geom type="plane" size="1 1 0.1" rgba=".9 0 0 1"/>
<body pos="0 0 0" >
<inertial pos="0 0 0" mass="3.7" diaginertia="0.0102675 0.0102675 0.00666" />
<joint type="free"/>
<geom type="box" contype="0" conaffinity="0" group="1" size=".1 .1 .3" rgba="0 .9 0 1"/>
<geom type='box' size=".1 .1 .3" rgba="0 .9 0 1"/>
<body pos="0 0 .6" quat="1 0 0 0">
<inertial pos="0 0 0" mass="3.7" diaginertia="0.0102675 0.0102675 0.00666" />
<joint name="joint1" pos="0 0 .3" axis="0 1 0" limited="true" range="-3.14159 3.14159" />
<geom type="box" contype="0" conaffinity="0" group="1" size=".1 .1 .3" rgba="0 .9 0 1"/>
<geom type="box" size=".1 .1 .3" rgba="1 .9 0 1"/>
</body>
</body>
</worldbody>
</mujoco>
注意joint的默认参考坐标是物体也就是model的中心
所以按照以下编码
<mujoco>
<compiler angle="radian" />
<worldbody>
<light diffuse=".5 .5 .5" pos="0 0 3" dir="0 0 -1"/>
<geom type="plane" size="10 10 0.1" rgba=".9 0 0 1"/>
<body pos="0 0 .25" >
<inertial pos="0 0 0" mass="10" diaginertia="0.0102675 0.0102675 0.00666" />
<joint type="free"/>
<geom type="box" contype="0" conaffinity="0" group="1" size=".1 .1 .25" rgba="0 .9 0 1"/>
<geom type='box' size=".1 .1 .25" rgba="0 .9 0 1"/>
<body pos="0 0 .5" quat="1 0 0 0">
<inertial pos="0 0 0" mass="3.7" diaginertia="0.0102675 0.0102675 0.00666" />
<joint name="joint1" pos="0 0 -0.3" axis="0 1 0" limited="true" range="-3.14159 3.14159" />
<geom type="box" contype="0" conaffinity="0" group="1" size=".1 .1 .2" rgba="0 .9 0 1"/>
<geom type="box" size=".1 .1 .2" rgba="1 .9 0 1"/>
</body>
</body>
</worldbody>
<actuator>
<motor name='joint1' ctrllimited="true" ctrlrange="-0.5 0.5" joint='joint1' gear="101"/> <!--range -150 150-->
</actuator>
</mujoco>References



















 2681
2681

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









