







文章目录
传递函数
传递函数简介与定义
传递函数简介 传递函数是描述线性系统动态特性的基本数学工具之一,经典控制理论的主要研究方法----频率响应法和根轨迹法----都是建立在传递函数的基础之上。传递函数是研究经典控制理论的主要工具之一。
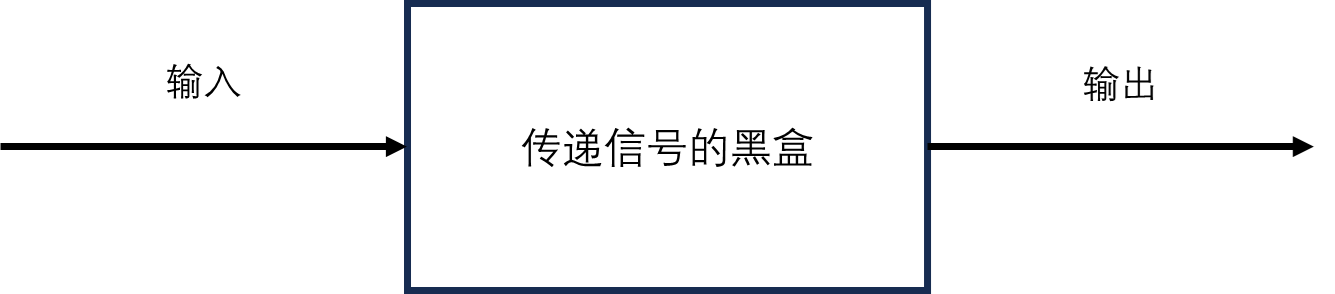
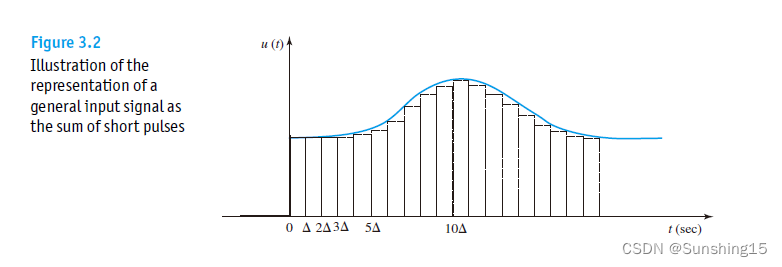
定义 y ( t ) y(t) y(t) 为如下图1控制系统在 t t t时刻的输出信号, u ( t ) u(t) u(t) 为该控制系统在 t t t时刻的输入信号。定量输入一定的信号,经系统传递在系统后端获取到输出的信号。参考三脚猫Frank:4.传递函数一文,假定输入信号如下图2所示,信号在 t > 0 t>0 t>0 时持续不断的输入控制系统,基于线性时不变系统的线性叠加性以及时不变特性可以得知,信号作用于系统的前后只影响响应输出的先后而不影响其形状。
那么,若要求任意输入 u ( t ) u(t) u(t) 对于图1线性时不变系统的输出响应,则可将输入 u ( t ) u(t) u(t) 进行分解,分解为无数个短矩阵脉冲,计算每个短矩阵脉冲输入对系统的输出响应,再基于线性叠加以及时不变性将所有短矩阵脉冲对应的输出响应相加,则可近似计算出整体系统在 [ 0 , t ] [0,t] [0,t] 时段内的输出响应。
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
图1:控制系统简图
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
图2:输入信号图
零初始状态线性定常系统
记 g ( t ) g(t) g(t)为单位脉冲响应函数,观察图2,假定 t = 0 t=0 t=0时刻前系统无任何输入,即 u ( 0 ) = 0 u(0)=0 u(0)=0。以 [ Δ , 2 Δ ] [\Delta,2\Delta] [Δ,2Δ]时间段为例,在 Δ \Delta Δ时刻输入信号,信号整体强度为小矩形的面积,即 Δ u ( Δ ) \Delta u(\Delta) Δu(Δ),该信号到 t t t时刻的响应时间为 t − Δ t-\Delta t−Δ,那么在 [ Δ , 2 Δ ] [\Delta,2\Delta] [Δ,2Δ]时间段内,系统的输出信号为 Δ u ( Δ ) g ( t − Δ ) \Delta u(\Delta)g(t-\Delta) Δu(Δ)g(t−Δ),当 Δ \Delta Δ足够小时,输出信号的叠加形式可写为积分形式,即有 y ( t ) = ∫ 0 + ∞ u ( τ ) g ( t − τ ) d τ , t ≥ 0 , (1) y(t)=\int_0^{+\infty}u(\tau)g(t-\tau)d\tau,t\geq0,\tag{1} y(t)=∫0+∞u(τ)g(t−τ)dτ,t≥0,(1)即输出响应可以表示为输入响应与单位脉冲响应的卷积形式。
考虑到微积分计算的复杂性,将(1)式运用拉普拉斯变换得 Y ( s ) = ∫ 0 + ∞ [ ∫ 0 + ∞ u ( τ ) g ( t − τ ) d τ ] e − s t d t = ∫ 0 + ∞ u ( τ ) e − s τ ∫ 0 + ∞ g ( t − τ ) e − s ( t − τ ) d ( t − τ ) d τ = ∫ 0 + ∞ u ( τ ) e − s τ G ( s ) d τ = G ( s ) U ( s ) , \begin{align*}Y(s)&=\int_0^{+\infty}[\int_0^{+\infty}u(\tau)g(t-\tau)d\tau]e^{-st}dt\\&=\int_0^{+\infty}u(\tau)e^{-s\tau}\int_0^{+\infty}g(t-\tau)e^{-s(t-\tau)}d(t-\tau)d\tau\\&=\int_0^{+\infty}u(\tau)e^{-s\tau}G(s)d\tau\\&=G(s)U(s),\end{align*} Y(s)=∫0+∞[∫0+∞u(τ)g(t−τ)dτ]e−stdt=∫0+∞u(τ)e−sτ∫0+∞g(t−τ)e−s(t−τ)d(t−τ)dτ=∫0+∞u(τ)e−sτG(s)dτ=G(s)U(s),其中 G ( s ) G(s) G(s)与 U ( s ) U(s) U(s)分别为 g ( t ) g(t) g(t)与 u ( t ) u(t) u(t)的拉普拉斯变换, G ( s ) G(s) G(s)即为传递函数。如下给出传递函数的定义。
定义 传递函数是指
零初始条件下线性时不变系统的脉冲响应的拉普拉斯变换,即输出的拉普拉斯变换与输入量的拉普拉斯变换之比。记作 G ( s ) = Y ( s ) / U ( s ) , (2) G(s)=Y(s)/U(s),\tag{2} G(s)=Y(s)/U(s),(2)其中 Y ( s ) Y(s) Y(s)与 U ( s ) U(s) U(s)分别为时域中输出函数与输入函数的拉普拉斯变换。
注: 若 u ( 0 ) ≠ 0 u(0)\neq 0 u(0)=0, 则在计算输出响应 y ( t ) y(t) y(t) 时,(1)式中的积分项会变为 u ( 0 ) g ( t ) + u ( τ ) g ( t − τ ) u(0)g(t)+u(\tau)g(t-\tau) u(0)g(t)+u(τ)g(t−τ), u ( 0 ) g ( t ) u(0)g(t) u(0)g(t)的卷积不为0,此时无法通过拉普拉斯变换计算出输出与输入的比值,从而无法得到传递函数。
一个栗子
微分算子拉普拉斯变换:
L [ f ( n ) ( t ) ] = s n L [ f ( t ) ] − s ( n − 1 ) f ( 0 ) − s ( n − 2 ) f ′ ( 0 ) − … − f ( n − 1 ) ( 0 ) \mathcal{L}[f^{(n)}(t)]=s^n\mathcal{L}[f(t)]-s^{(n-1)}f(0)-s^{(n-2)}f^{'}(0)-\ldots-f^{(n-1)}(0) L[f(n)(t)]=snL[f(t)]−s(n−1)f(0)−s(n−2)f′(0)−…−f(n−1)(0)
假定图1系统输入输出有如下关系成立: y ′ ′ ′ + 2 y ′ ′ + 3 y ′ + 4 y = 6 u ′ ′ + 5 u ′ + u , (2) y^{'''}+2y^{''}+3y^{'}+4y=6u^{''}+5u^{'}+u,\tag{2} y′′′+2y′′+3y′+4y=6u′′+5u′+u,(2)初始状态满足 y ( 0 ) = 0 y(0)=0 y(0)=0, y ′ ( 0 ) = 0 y^{'}(0)=0 y′(0)=0, y ′ ′ ( 0 ) = 0 y^{''}(0)=0 y′′(0)=0, u ( 0 ) = 0 u(0)=0 u(0)=0, u ′ ( 0 ) = 0 u^{'}(0)=0 u′(0)=0, 则根据微分算子拉普拉斯变换公式可得: s 3 Y ( s ) + 2 s 2 Y ( s ) + 3 s Y ( s ) + 4 Y ( s ) = 6 s 2 U ( s ) + 5 s U ( s ) + U ( s ) , s^3Y(s)+2s^2Y(s)+3sY(s)+4Y(s)=6s^2U(s)+5sU(s)+U(s), s3Y(s)+2s2Y(s)+3sY(s)+4Y(s)=6s2U(s)+5sU(s)+U(s),从而可得到传递函数为 G ( s ) = Y ( s ) U ( s ) = 6 s 2 + 5 s + 1 s 3 + 2 s 2 + 3 s + 4 , G(s)=\frac{Y(s)}{U(s)}=\frac{6s^2+5s+1}{s^3+2s^2+3s+4}, G(s)=U(s)Y(s)=s3+2s2+3s+46s2+5s+1,其中 Y ( s ) = L [ y ( t ) ] Y(s)=\mathcal{L}[y(t)] Y(s)=L[y(t)], U ( s ) = L [ u ( t ) ] U(s)=\mathcal{L}[u(t)] U(s)=L[u(t)]。
非零初始状态的线性定常系统
如下以一个简单系统说明若系统的初始状态非零,无法得到拉普拉斯变换得到传递函数,但能计算出输出响应。考虑如下系统
y
′
′
+
3
y
′
+
2
y
=
6
u
′
+
18
u
,
(3)
y^{''}+3y^{'}+2y=6u^{'}+18u,\tag{3}
y′′+3y′+2y=6u′+18u,(3) 初始条件为
y
(
0
)
=
2
,
y
′
(
0
)
=
1
,
u
(
0
)
=
1
y(0)=2,y^{'}(0)=1, u(0)=1
y(0)=2,y′(0)=1,u(0)=1。
根据微分算子拉普拉斯变换公式,对(3)式进行拉普拉斯变换可得:
(
s
2
Y
(
s
)
−
s
y
(
0
)
−
y
′
(
0
)
)
+
3
(
s
Y
(
s
)
−
y
(
0
)
)
+
2
Y
(
s
)
=
6
(
s
U
(
s
)
−
u
(
0
)
)
+
18
U
(
s
)
,
(s^2Y(s)-sy(0)-y^{'}(0))+3(sY(s)-y(0))+2Y(s)=6(sU(s)-u(0))+18U(s),
(s2Y(s)−sy(0)−y′(0))+3(sY(s)−y(0))+2Y(s)=6(sU(s)−u(0))+18U(s),代入初始条件整理可得:
s
2
Y
(
s
)
+
3
s
Y
(
s
)
+
2
Y
(
s
)
=
6
s
U
(
s
)
+
18
U
(
s
)
+
2
s
+
1
,
s^2Y(s)+3sY(s)+2Y(s)=6sU(s)+18U(s)+2s+1,
s2Y(s)+3sY(s)+2Y(s)=6sU(s)+18U(s)+2s+1,从而可得输出响应的拉普拉斯变换为
Y
(
s
)
=
6
(
s
+
3
)
s
2
+
3
s
+
2
U
(
s
)
+
2
s
+
1
s
2
+
3
s
+
2
,
(4)
Y(s)=\frac{6(s+3)}{s^2+3s+2}U(s)+\frac{2s+1}{s^2+3s+2},\tag{4}
Y(s)=s2+3s+26(s+3)U(s)+s2+3s+22s+1,(4)此时无法直接求出
Y
(
s
)
/
U
(
s
)
Y(s)/U(s)
Y(s)/U(s)的比值,从而无法得到传递函数,但依然可以通过拉普拉斯反变换求出输出响应。
假定系统的输入信号为单位阶跃信号,即有
u
(
t
)
=
1
,
t
≥
0
u(t)=1,t\geq0
u(t)=1,t≥0,则
U
(
s
)
=
1
s
U(s)=\frac{1}{s}
U(s)=s1,则通过拉普拉斯逆变换可得系统的输出响应为
y
(
t
)
=
L
−
1
[
Y
(
s
)
]
=
L
−
1
[
6
(
s
+
3
)
s
2
+
3
s
+
2
∗
1
s
]
+
L
−
1
[
2
s
+
1
s
2
+
3
s
+
2
]
=
L
−
1
[
9
s
−
12
s
+
1
+
3
s
+
2
]
+
L
−
1
[
3
s
+
2
−
1
s
+
1
]
=
(
9
−
12
e
−
t
+
3
e
−
2
t
)
+
(
3
e
−
2
t
−
e
−
t
)
,
\begin{align*}y(t)&=\mathcal{L}^{-1}[Y(s)]=\mathcal{L}^{-1}[\frac{6(s+3)}{s^2+3s+2}*\frac{1}{s}]+\mathcal{L}^{-1}[\frac{2s+1}{s^2+3s+2}]\\&=\mathcal{L}^{-1}[\frac{9}{s}-\frac{12}{s+1}+\frac{3}{s+2}]+\mathcal{L}^{-1}[\frac{3}{s+2}-\frac{1}{s+1}]\\&=(9-12e^{-t}+3e^{-2t})+(3e^{-2t}-e^{-t}),\tag{5}\end{align*}
y(t)=L−1[Y(s)]=L−1[s2+3s+26(s+3)∗s1]+L−1[s2+3s+22s+1]=L−1[s9−s+112+s+23]+L−1[s+23−s+11]=(9−12e−t+3e−2t)+(3e−2t−e−t),(5)(5)式中前一个括号中的三项为输入信号产生的输出响应分量,其与初始状态无关,称为系统的零状态响应,又称为强迫响应;后两项是由初始状态产生的输出分量,其与输入信号无关,称为系统的零输入响应,又称为自由响应。零状态响应和零输入响应之和称为系统的全响应,式中的
1
1
1,即
e
0
t
e^{0t}
e0t,
e
−
t
e^{-t}
e−t以及
e
−
2
t
e^{-2t}
e−2t 为系统的模态,其主要由输出响应拉普拉斯变换
Y
(
s
)
Y(s)
Y(s)的系数多项式决定,即(4)式中的分母多项式,与初始条件无关。
一般而言,线性定常系统的输出响应包括两部分,即零状态响应与零输入响应。零状态响应取决于系统结构、参数和输入信号;零输入响应取决于系统结构、参数以及输入输出的初始条件。当输出响应中仅有零状态响应时,可得到传递函数。
传递函数一般式
已知线性定常系统的微分方程为
a
0
y
(
n
)
+
a
1
y
(
n
−
1
)
+
…
+
a
n
−
1
y
′
+
a
n
y
=
b
0
u
(
m
)
+
b
1
u
(
m
−
1
)
+
…
+
b
m
−
1
u
′
+
b
m
u
,
(6)
\begin{align*}&a_0y^{(n)}+a_1y^{(n-1)}+\ldots+a_{n-1}y^{'}+a_ny\\=&b_0u^{(m)}+b_1u^{(m-1)}+\ldots+b_{m-1}u^{'}+b_mu\end{align*},\tag{6}
=a0y(n)+a1y(n−1)+…+an−1y′+anyb0u(m)+b1u(m−1)+…+bm−1u′+bmu,(6)式中
y
(
t
)
y(t)
y(t) 为输出量,
u
(
t
)
u(t)
u(t) 为输入量,假定
y
(
t
)
y(t)
y(t) 和
u
(
t
)
u(t)
u(t) 以及各阶导数初始值均为零,对上述微分方程取拉普拉斯变换可得
(
a
0
s
n
+
a
1
s
n
−
1
+
…
+
a
n
−
1
s
+
a
n
)
Y
(
s
)
=
(
b
0
s
m
+
b
1
s
m
−
1
+
…
+
b
m
−
1
s
+
b
m
)
U
(
s
)
,
\begin{align*}&(a_0s^n+a_1s^{n-1}+\ldots+a_{n-1}s+a_n)Y(s)\\=&(b_0s^m+b_1s^{m-1}+\ldots+b_{m-1}s+b_m)U(s),\end{align*}
=(a0sn+a1sn−1+…+an−1s+an)Y(s)(b0sm+b1sm−1+…+bm−1s+bm)U(s),从而可得传递函数为:
G
(
s
)
=
Y
(
s
)
U
(
s
)
=
b
0
s
m
+
b
1
s
m
−
1
+
…
+
b
m
−
1
s
+
b
m
a
0
s
n
+
a
1
s
n
−
1
+
…
+
a
n
−
1
s
+
a
n
:
=
M
(
s
)
N
(
s
)
(7)
G(s)=\frac{Y(s)}{U(s)}=\frac{b_0s^m+b_1s^{m-1}+\ldots+b_{m-1}s+b_m}{a_0s^n+a_1s^{n-1}+\ldots+a_{n-1}s+a_n}:=\frac{M(s)}{N(s)}\tag{7}
G(s)=U(s)Y(s)=a0sn+a1sn−1+…+an−1s+anb0sm+b1sm−1+…+bm−1s+bm:=N(s)M(s)(7)定义
M
(
s
)
M(s)
M(s) 为传递函数的分子多项式,
N
(
s
)
N(s)
N(s) 为传递函数的分母多项式。传递函数的分母多项式又称为系统的特征多项式,可用于衡量系统的结构与参数情况。称
M
(
s
)
=
0
M(s)=0
M(s)=0 的解为系统(6)的零点,
N
(
s
)
=
0
N(s)=0
N(s)=0 的解为系统(6)的极点,系统的极点情况决定了系统输出响应的模态情况,零点会影响各模态在响应中所占的比重。根据所计算的系统零点,极点情况,记传递函数(7)的零点为
z
1
,
z
2
,
…
,
z
m
z_1,z_2,\ldots,z_m
z1,z2,…,zm,极点为
p
1
,
p
2
,
…
,
p
n
p_1,p_2,\ldots,p_n
p1,p2,…,pn,传递函数还可表示为如下形式:
G
(
s
)
=
K
g
(
s
−
z
1
)
(
s
−
z
2
)
…
(
s
−
z
m
)
(
s
−
p
1
)
(
s
−
p
2
)
…
(
s
−
p
n
)
,
(8)
G(s)=K_g\frac{(s-z_1)(s-z_2)\ldots(s-z_m)}{(s-p_1)(s-p_2)\ldots(s-p_n)},\tag{8}
G(s)=Kg(s−p1)(s−p2)…(s−pn)(s−z1)(s−z2)…(s−zm),(8)其中
K
g
K_g
Kg 称为根轨迹增益。
传递函数性质
(1) 传递函数和微分方程一样,表征系统的动态特性;
(2) 传递函数是系统本身的一种属性,它只取决于系统的结构和参数,与输入量的大小和性质无关;
(3) 传递函数是在零初始条件下得到的,当初始条件不为零时,传递函数不能反映系统的全部特性;
(4) 一般而言,传递函数的零点阶数要小于极点阶数,即传递函数为复变量
s
s
s的真有理分式。因为,系统或者元件总是具有惯性,且输入系统的能量总是有限的;
(5) 传递函数不提供系统物理结构的任何信息,传递函数具有无量纲性,物理上完全不同的系统可以具有相同的传递函数;
(6) 传递函数只适用于线性定常系统(如下以示例进行说明),且只表示单输入单输出(SISO)之间的关系,对多输入多输出(MIMO)系统可用传递函数阵表示。对于复杂的系统,有时不一定求出其微分方程的解,而只需要通过对其传递函数进行分析,可以了解系统的特性。
传递函数只适用于单输入单输出线性定常系统的说明
考虑如下具有零初始条件的单输入单输出的线性定常系统: { x ˙ ( t ) = A x ( t ) + B u ( t ) , y ( t ) = C x ( t ) + D u ( t ) , (9) \begin{cases} \dot{x}(t)=Ax(t)+Bu(t),\\ y(t)=Cx(t)+Du(t), \end{cases}\tag{9} {x˙(t)=Ax(t)+Bu(t),y(t)=Cx(t)+Du(t),(9)对上述系统(9)进行拉普拉斯逆变换可得 { s X ( s ) = A X ( s ) + B U ( s ) , Y ( s ) = C X ( s ) + D U ( s ) , (10) \begin{cases} sX(s)=AX(s)+BU(s),\\ Y(s)=CX(s)+DU(s), \end{cases}\tag{10} {sX(s)=AX(s)+BU(s),Y(s)=CX(s)+DU(s),(10)经整理可得 X ( s ) = ( s I − A ) − 1 B , (11) X(s)=(sI-A)^{-1}B,\tag{11} X(s)=(sI−A)−1B,(11)将上述 X ( s ) X(s) X(s)表达式带入(10)中 Y ( s ) Y(s) Y(s)的表达式中得 Y ( s ) = [ C ( s I − A ) − 1 B + D ] U ( s ) , (12) Y(s)=[C(sI-A)^{-1}B+D]U(s),\tag{12} Y(s)=[C(sI−A)−1B+D]U(s),(12)从而得传递函数 G ( s ) G(s) G(s)为 G ( s ) = Y ( s ) U ( s ) = C ( s I − A ) − 1 B + D 。 (13) G(s)=\frac{Y(s)}{U(s)}=C(sI-A)^{-1}B+D。\tag{13} G(s)=U(s)Y(s)=C(sI−A)−1B+D。(13)
- 若非单输入单输出系统,则状态变量
x
(
t
)
x(t)
x(t),
u
(
t
)
u(t)
u(t),
y
(
t
)
y(t)
y(t) 均为
向量形式,而非标量,则对(9)进行拉普拉斯变换时,方程(10)为一个向量形式的代数方程,则(13)式得传递函数并非为一个标量,而是一个函数矩阵,矩阵中的每一项由对应的状态变量、输入变量以及输出变量的分量决定。 - 若系统(9)非线性定常系统,即有系数 A A A, B B B, C C C, D D D为时间 t t t的函数,此时难以求算 X ( s ) X(s) X(s)的表示形式, ( s I − A ( t ) ) − 1 (sI-A(t))^{-1} (sI−A(t))−1的解析形式难以确定。
开环传递函数与闭环传递函数的定义与作用
开环传递函数
自动控制系统中一般而言有两种解释:一种是
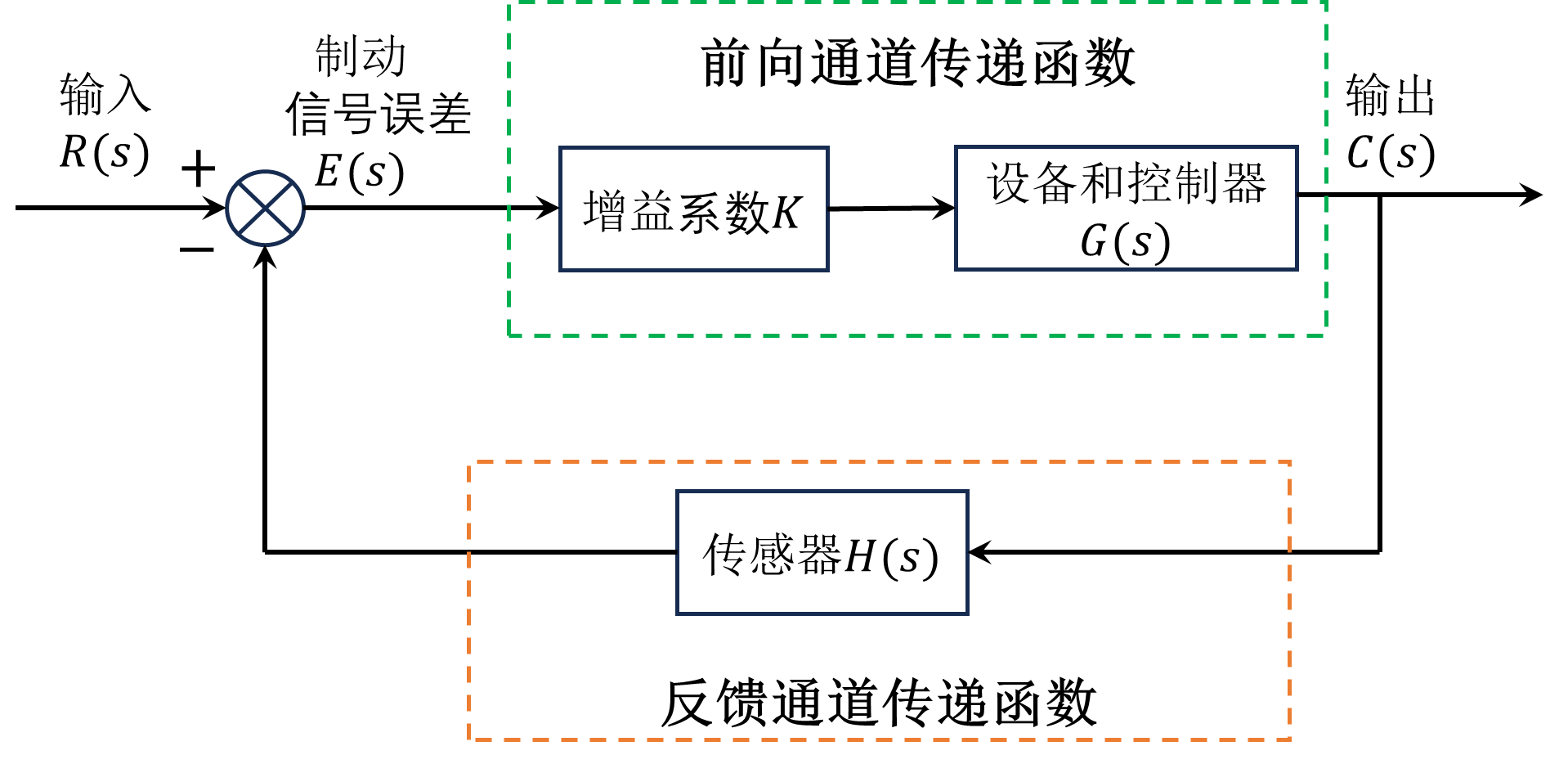
开环系统(即无反馈的系统,如图2所示,系统中不存在输出到输入方向的信号)的传递函数,用于表征开环系统的动态特性,其表达式即为上述所述的系统中系统输出的拉普拉斯逆变换与系统输入的拉普拉斯变化之比;第二种是针对闭环系统而言的(如图3所示)开环传递函数(Open Loop Transfer Function, OLTF)即为前向通道传递函数与反馈通道传递函数的乘积(即如图3中增益系数 K K K,设备和控制器 G ( s ) G(s) G(s),以及传感器 H ( s ) H(s) H(s)的乘积)即 O L T F = K G ( s ) H ( s ) , OLTF=KG(s)H(s), OLTF=KG(s)H(s),通常而言,为简化问题且不影响分析,增益系数 K K K的取值为 K = 1 K=1 K=1。即有 O L T F = G ( s ) H ( s ) . OLTF=G(s)H(s). OLTF=G(s)H(s).
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
如图3
闭环传递函数
闭环传递函数描述了一个系统的反馈回路对受控过程输入信号的综合影响结果的数学函数。
如图3所示,对于一个反馈控制系统,其闭环传递函数为系统输出与系统输入之比,其中,系统输出为
C
(
s
)
=
E
(
s
)
G
(
s
)
=
[
R
(
s
)
−
C
(
s
)
H
(
s
)
]
G
(
s
)
,
C(s)=E(s)G(s)=[R(s)-C(s)H(s)]G(s),
C(s)=E(s)G(s)=[R(s)−C(s)H(s)]G(s),因此
C
(
s
)
R
(
s
)
=
[
R
(
s
)
−
C
(
s
)
H
(
s
)
]
G
(
s
)
R
(
s
)
,
\frac{C(s)}{R(s)}=\frac{[R(s)-C(s)H(s)]G(s)}{R(s)},
R(s)C(s)=R(s)[R(s)−C(s)H(s)]G(s),经计算可得
C
(
s
)
R
(
s
)
=
G
(
s
)
1
+
G
(
s
)
H
(
s
)
.
\frac{C(s)}{R(s)}=\frac{G(s)}{1+G(s)H(s)}.
R(s)C(s)=1+G(s)H(s)G(s).
注: 开环传递函数为
G
(
s
)
H
(
s
)
G(s)H(s)
G(s)H(s)而非
G
(
s
)
G(s)
G(s)的原因:对于任意的系统若完成什么任务,都需要了解系统本身的响应能力,而对于具有反馈信号的系统而言,其响应能力包括设备的运转能力、系统程序的动力学特性以及反馈信号的传递能力。开环传递函数的物理意义即为告知控制器其所要处理的对象是哪些环节。因此,在对一个系统分析时,需要首先考虑开环传递函数,可以使用伯德图或者奈奎斯特图等工具为不同的控制任务确定出合适的增益参数。若只知闭环传递函数,则无法直接更改增益参数从而适应不同的任务。
参考文献
[1] 【自控】线性系统数学模型(3)传递函数
[2] 三脚猫Frank:4.传递函数
[3] G.F. Franklin, J.D. Powell, A.Emami-Naeini, Feedback Control of Dynamic Systems, 7th Edition, 2014, Pearson
[4] 胡寿松,自动控制原理(第六版),2013,科学出版社
[5]【现控理论】(一、系统的传递函数矩阵)----学习笔记
[6] 自动控制理论中的开环传递函数是什么意思?为什么是 G(s)H(s),而非 G(s)?lenleo的回答、萧然的回答
[7] 开环传递函数

















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









