







第一章 Otostudio功能块FB练习
前言
使用说明:
Gohome为FB块,建议使用时一直刷新,
通过控制其输入的EN / Execute 来使轴进行回零
1、EN置1,开启回零功能
2、设置轴号AxisID、回零高速度HSpeed、回零低速度LSpeed、搜索原点方向MoveDir,
按实际设置搜索限位范围和搜索Home范围ScanLmtPos和ScanHomePos,
按需设置离开距离EscapePos和偏移OffSet
3、(可选)设置运动参数TrapP
4、置位启动信号Execute,轴就按照设置的参数进行回原点。Execute为上升沿信号(已经内置上升沿)
6、回零成功后,完成信号Done置1,当Execute置1、EN置0、Stop置1,自动复位Done,
7、在EN为1时,Stop有信号可停止该轴的运动
一、初始布局
1.1 初建变量
FUNCTION_BLOCK shoudong
VAR_INPUT
EN: BOOL := 0; (* 运动确认 *)
Execute: BOOL := 0; (* 启动信号 *)
Stop: BOOL := 0; (* 急停:置1 ,使功能块立即停止 *)
END_VAR
VAR_OUTPUT
Done: BOOL; (* 运动完成信号 *)
END_VAR
VAR
Exec_R: R_TRIG;
EN_R: R_TRIG; (* EN上升沿 *)
EN_F: F_TRIG; (* EN下降沿 *)
HStep: INT := 0;
END_VAR
1.2 功能块布局
Exec_R(CLK:=Execute);
EN_F(CLK:=EN);
IF EN THEN
IF Stop THEN
HStep:=0;
Done:=0;
END_IF
IF Exec_R.Q AND NOT (Stop) THEN
Done:=0;
HStep:=180;
END_IF
CASE HStep OF
0:
;
180:
IF () THEN
HStep:=1810;
ELSE
IF () THEN
HStep:=1820;
ELSE
HStep:=200;
END_IF
END_IF
200:
IF NOT() THEN
IF NOT() THEN
HStep:=190;
ELSE
HStep:=230;
END_IF
END_IF
201:
IF NOT() THEN
HStep:=220;
END_IF
IF () OR () THEN
HStep:=202;
END_IF
205:
IF () THEN
HStep:=206;
END_IF
216:(*成功*)
Done:=1;
HStep:=0;
230:(*失败*)
Done:=0;
HStep:=0;
END_CASE
END_IF
IF EN_F.Q THEN
HStep:=0;
Done:=0;
END_IF
1.3 输入
Di1:DWORD:= 16#FFFFFFFF;
VAR1 AT %IW0 : WORD;
VAR2 AT %IW1 : WORD;
GT_GetDi(4,ADR(Di1));
IO_input_t^.i0_0:=Di1.0;
IO_input_t^.i0_1:=Di1.7;
IO_input_t^.i1_1:=VAR1.1;
IO_input_t^.i1_2:=VAR1.2;
IO_input_t^.i1_3:=VAR1.3;
1.4 输出
DO1:DWORD:= 16#FFFFFFFF;
VAR1 AT %QW0 : WORD;
VAR2 AT %QW1 : WORD;
SZDQH1(shouzi:=Autonum_t^.zhiliudianjishouzi ,
zidong:=Autonum_t^.zhiliudianjizidong ,
shoudong:=Autonum_t^.zhiliudianjishoudong ,
kaiguan=>Autonum_t^.Q0_0);
DO1.0:= Autonum_t^.Q0_0;
GT_SetDo(12,DO1);
SZDQH1(shouzi:=Autonum_t^.sanzhouxipanshouzi ,
zidong:=Autonum_t^.sanzhouxipanzidong ,
shoudong:=Autonum_t^.sanzhouxipanshoudong ,
kaiguan=>Autonum_t^.Q0_1);
VAR1.0:=Autonum_t^.Q0_1;
1.5 TRIP运动
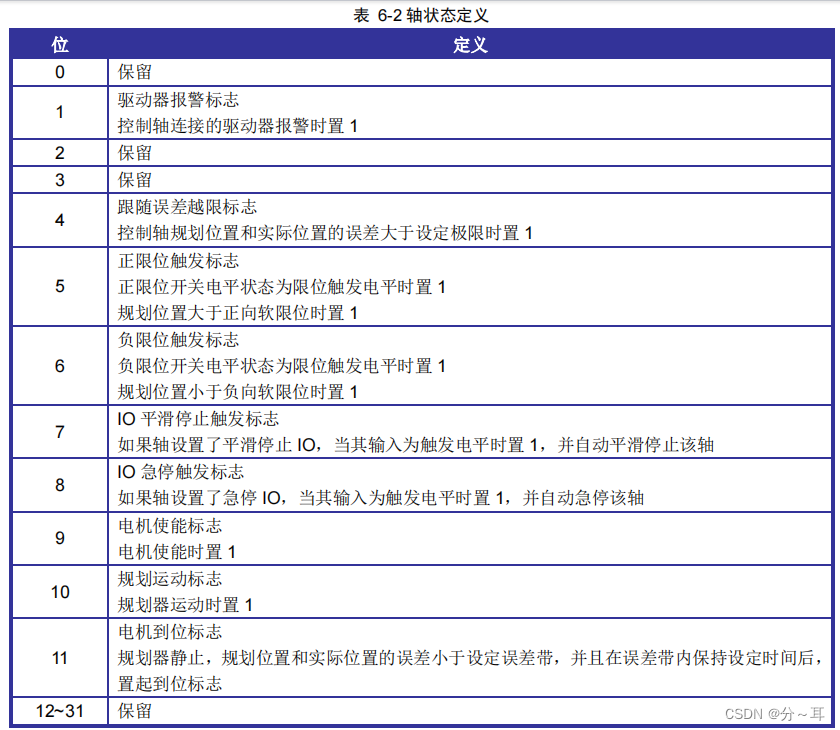
GT_GetSts(AxisID,ADR(psts),count,ADR(pclock));(*读取轴状态*)
IF psts.5 THEN(*正限位触发标志*)
HStep:=1810;
ELSE
IF psts.6 THEN(*负限位触发标志*)
HStep:=1820;
ELSE
HStep:=200;
END_IF
END_IF
1810:
(*起始位置在正限位*)
GT_ClrSts(AxisID,1);
GT_ZeroPos(AxisID,1);
(*先往负向离开*)
IF NOT(psts.1) THEN(*驱动器报警标志*)
GT_PrfTrap(AxisID);
GT_SetTrapPrm(AxisID,ADR(TrapP));
GT_SetVel(AxisID, ABS(LSpeed));
GT_SetPos(AxisID,-ABS(EscapePos));
Sts:=1810;(*Escape Lmt*)
GT_Update(SHL(DWORD#1,AxisID-1));
HStep:=190;
ELSE
HStep:=230;
END_IF
IF NOT(psts.10) THEN
GT_Stop(SHL(DWORD#1,AxisID-1),1);
HStep:=200;
END_IF
IF MoveDir THEN
GT_SetPos(AxisID,ScanLmtPos);(* 搜索限位范围:第一次点位用到的距离 *)
ELSE
GT_SetPos(AxisID,-ScanLmtPos);
END_IF
















 2407
2407

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











