







 超级会员免费看
超级会员免费看
LIDAR(Light Detection and Ranging)是一种利用激光技术测量目标物体距离的方法。LIDAR系统将激光束发送到目标物体上,当激光与目标物体相互作用时,一部分激光被反射回来。接收器接收到反射回来的激光,并测量激光的时间延迟。根据激光的速度和时间延迟,可以计算出目标物体与LIDAR系统之间的距离。
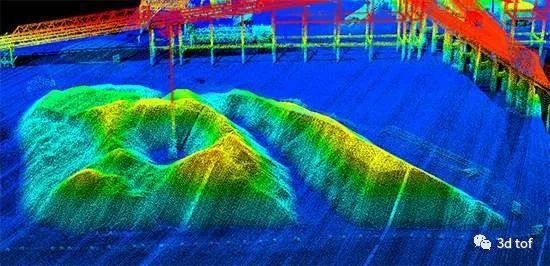
LIDAR高分辨率是指LIDAR系统可以测量非常细微的距离变化。原理是通过使用短脉冲激光来提供高精度的时间延迟测量,从而实现高分辨率的距离测量。短脉冲激光可以提供很高的时间分辨率,即可以精确测量激光束与目标物体之间的很小的时间延迟差。通过将激光器和接收器的技术不断改进,可以实现更高分辨率的距离测量。
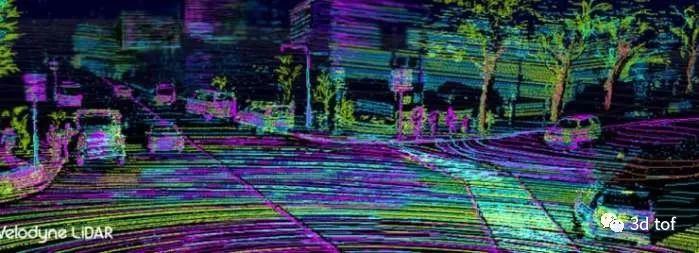
激光雷达点云高反“膨胀”是指当激光扫描高反射率物体后,输出的点云会向四周扩散,看起来就像“膨胀”了一样。这主要是由于高反射率物体对激光的强反射和散射效应导致的。当激光雷达扫描这类物体时,其回波信号会比扫描低反射率物体时更强,导致点云数据在生成时出现扩散或膨胀现象。这种现象会影响点云数据的精度和物体表面的细节表现,进而影响后续的图像处理、目标检测和识别等任务。LIDAR高分辨率和高反膨胀是通过使用短脉冲激光和校正算法来实现的。这些技术可以提高LIDAR系统的距离测量精度和准确性。
为了解决这

 订阅专栏 解锁全文
订阅专栏 解锁全文

















 949
949

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











