






文章内容来自 3D视觉工坊——UIUC&北大最新工作Radarize:室内环境大规模雷达SLAM
作者 :泡椒味的口香糖
添加的注释仅供参考,博主个人学习使用。如有侵权,请联系我删除!!
1. 这篇文章希望解决什么问题?
现有的Radar SLAM主要有如下几个问题:
在走廊等低纹理场景,由于缺乏明显的几何特征,导致当前帧可能和距离很远的帧发生误匹配(a);
IMU在恒速模式下会产生较大噪声,且IMU和Radar的外参标定、时间同步很难操作;
无线电信号反射会在Radar地图中产生伪影(b);(在雷达地图中,无线电信号会在环境中的不同物体或障碍物上发生反射。这些反射可能会导致信号在雷达系统中产生不准确或混淆的结果,形成伪影。这种情况可能是由于信号在反射时出现的多径效应或者环境中存在的多个反射源引起的。伪影可能会干扰雷达系统对目标位置或地图中物体位置的准确感知,需要通过信号处理或者地图构建算法来进行处理和纠正,以减少这种干扰对系统性能的影响)
3D地图投影到2D时,受到单片毫米波雷达的方位波束影响,地板和天花板反射会产生伪影(c)。

2. 具体原理是什么?
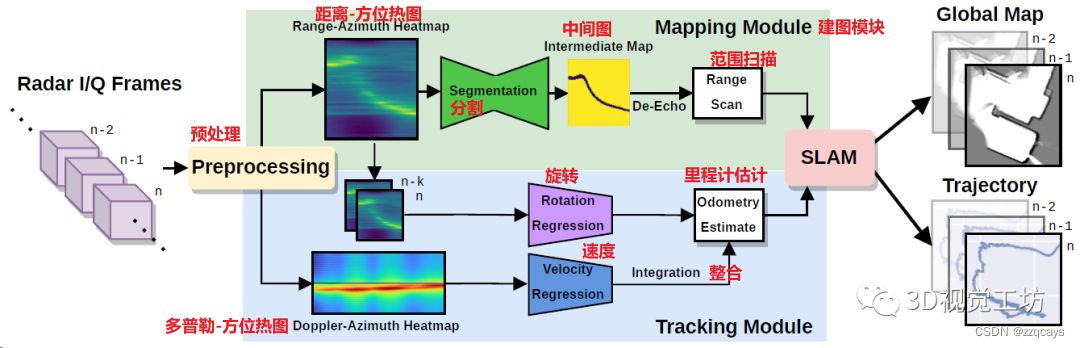
来看一下Radarize的具体pipeline,输入是Radar帧,输出是机器人轨迹和全局地图。Radarize主要利用FMCW雷达信号的特性(FMCW(Frequency Modulated Continuous Wave)雷达是一种特殊类型的雷达系统,其特点是连续地改变发送的频率。它通过调制连续的雷达波信号频率来执行测距和测速。FMCW雷达在发送信号时,会连续改变频率,然后接收反射回来的信号,并分析回波信号与发送信号之间的频率差异,以确定目标物体的距离和速度),由三部分组成。
首先,预处理模块将雷达I / Q帧转换为热力图,跟踪模块分别从多普勒-方位热图和距离-方位热图中识别出平移和旋转,建图模块首先抑制垂直反射(例如地板和天花板),然后使用轻量级分割模型(UNet )对距离-方位热图中的反射体进行分割。分割模型之后是执行多径抑制的去回波过程,最后将建图和跟踪模块的输出输入到SLAM后端,优化后输出实时全局地图和轨迹估计。
(
当雷达接收到信号时,预处理模块负责将这些信号转换成一个热力图,这个热力图可以显示出物体在空间中的位置和距离。
接下来,跟踪模块会从这个热力图中找出物体的移动和旋转。建图模块则会处理这个热力图,去除不需要的反射信号(比如来自地板或天花板的信号),然后利用一个轻量级的分割模型(称为UNet)将热力图中的物体进行分割,把它们分开。在分割之后,会进行去除一些不必要的信号的处理,最后,建图和跟踪模块的输出被输入到SLAM后端。SLAM后端会做一些优化,然后输出一个实时的全局地图和轨迹估计。这个全局地图可以显示出环境中的各个物体以及机器人的行进路径。
)
再来看一下如何从合成的多普勒-方位热图估计二维平移运动,其中前视雷达将环境中的反射体投射到水平面(蓝色)上并测量其速度(a)。后面三列分别是向前运动时的多普勒-方位热图(b)、右移时的多普勒-方位热力图(c)、(向前+右)对角线移动时多普勒-方位热力图(d)。
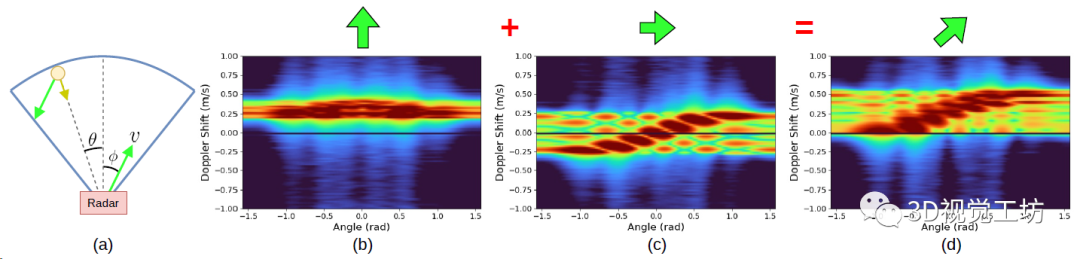
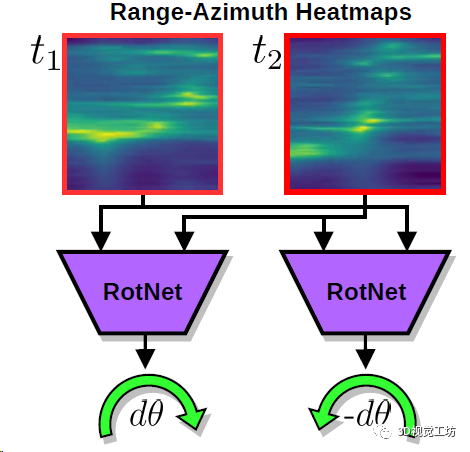
因为在旋转运动过程中,反射体相对于雷达的径向速度为零,所以基于多普勒的估计很难解算旋转运动。因此旋转估计是使用距离-方位图来预测的,雷达从t1到t2有一个向右的旋转,会导致t2的热力图左移。
(
当雷达设备旋转时,它会扫描周围的环境,并将所检测到的物体或障碍物的位置和距离信息记录在一个叫做距离-方位图的数据集中。在旋转运动过程中,雷达测量到的物体在雷达坐标系中的径向速度为零,也就是物体相对于雷达的距离没有变化,这使得基于多普勒效应的速度估计变得困难。
因此,为了对旋转运动进行估计,我们使用距离-方位图来做预测。当雷达从时间点 t1 转到时间点 t2 时,雷达所观测到的物体在热力图上的位置会随着雷达的旋转发生变化。如果雷达向右旋转,热力图中的物体或障碍物会在图上向左移动。这种变化可以帮助我们预测雷达设备在旋转过程中所检测到的物体位置的变化。
简单来说,当雷达旋转时,它所记录的物体位置会在热力图上发生移动,这种移动可以帮助我们理解雷达设备周围环境中物体的位置和运动变化。
)
3. 再来看看和同类方法的对比
简单介绍一下对比的同类算法:MilliEgo是一种基于稀疏点云的Radar-IMU里程计,利用交叉注意力机制将里程计估计值与辅助的IMU数据进行融合。RNIN是一种将IMU读数回归到里程计估计值的神经-惯性导航模型。
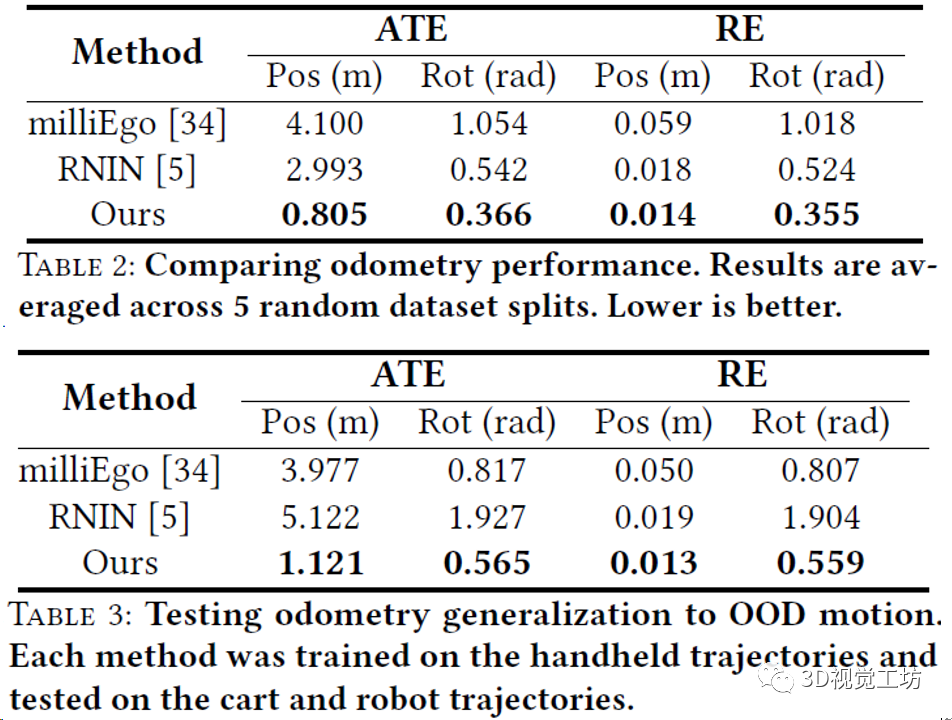
可以发现Radarize在不使用IMU的情况下,精度和泛化性都超越了多传感器方案,OOD是Out-of-Distribution的缩写,表示不同的运动分布。
(
“OOD”是“Out-of-Distribution”的缩写,中文意思是“分布外”,在机器学习和统计学领域中常用来描述模型在未见过的或不同于训练数据分布的数据上的性能表现。
在训练机器学习模型时,我们通常使用一组数据来训练模型,这些数据代表了我们希望模型能够处理和泛化的情况。当模型在训练时接触到类似于训练数据的样本时,通常能够表现出较好的性能。
然而,在现实世界中,模型可能会遇到不同于训练数据的情况,这些情况可能属于模型未见过的数据分布,这种情况就被称为“Out-of-Distribution”或“OOD”。也就是说,这些数据可能与模型训练数据的分布不同,可能是某种新颖的情况或者来自于不同的数据源。
在文章或研究中,当提到“测试里程计对OOD运动的泛化性能”时,意思是在不同于训练数据分布的运动场景下(即分布外),对比模型在这些未知的或不同分布下的性能表现。这有助于评估模型的泛化能力,即模型在未知场景下的表现能力。
)
表2:比较里程计性能。结果是在5个随机数据集划分上进行平均的。数值越低表示性能越好。
表3:测试里程计对OOD(Out-of-Distribution)运动的泛化性能。每种方法在手持轨迹上进行训练,并在手推车和机器人轨迹上进行测试。
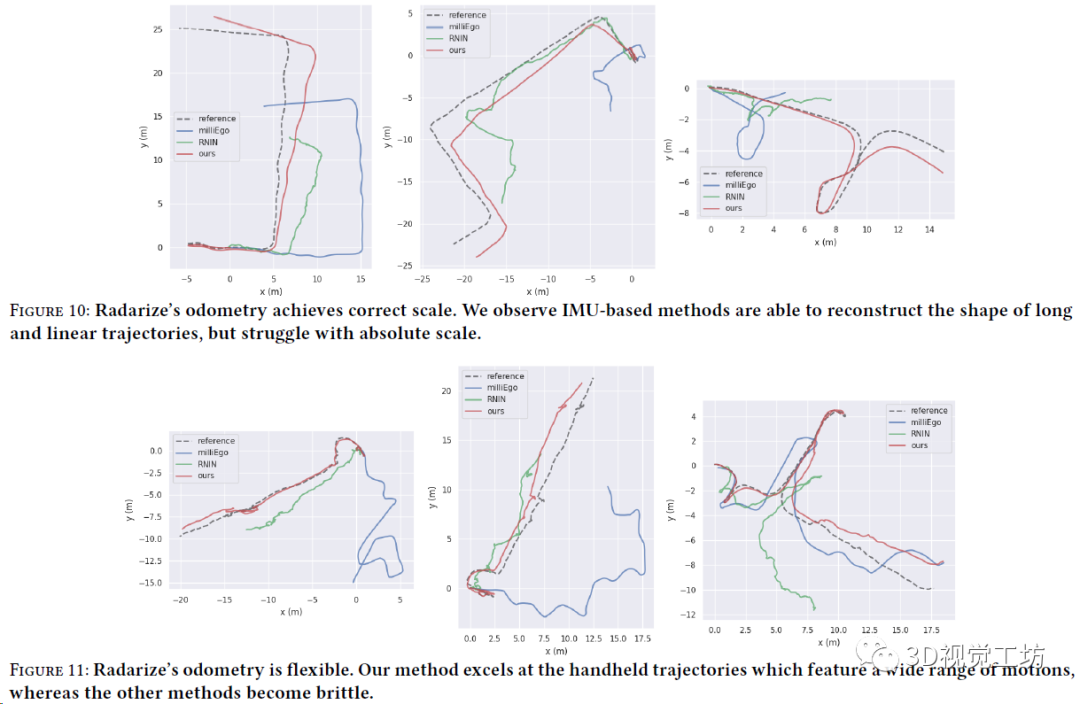
轨迹精度的定性对比,可以发现Radarize的轨迹距离真值最近。
图10:Radarize的里程计实现了正确的比例尺。我们观察到基于IMU的方法能够重建长而线性的轨迹的形状,但在绝对比例尺方面存在困难。
图11:Radarize的里程计是灵活的。我们的方法在手持轨迹上表现出色,这些轨迹具有各种运动范围,而其他方法则变得脆弱。
对更多实验结果和文章细节感兴趣的读者,可以阅读一下论文原文~
4. 论文信息
标题:Radarize: Large-Scale Radar SLAM for Indoor Environments
作者:Emerson Sie, Xinyu Wu, Heyu Guo, Deepak Vasisht
机构:伊利诺伊大学、北京大学
原文链接:https://arxiv.org/abs/2311.11260
博主总结:
该论文的主要目标在于解决现有雷达SLAM存在的问题,并提出了名为"Radarize"的解决方案,试图改进现有雷达SLAM的性能。
Radarize针对现有雷达SLAM存在的问题提出了解决方案:
1. 低纹理场景的误匹配问题: 在低纹理场景下,目前的雷达SLAM可能存在当前帧与较远帧的误匹配问题,Radarize试图解决这个问题。
2. IMU和雷达的融合和校准问题: IMU在恒速模式下噪声较大,而IMU和雷达的外参标定、时间同步等操作比较困难。Radarize尝试解决IMU与雷达数据的融合问题。
3. 伪影问题: 无线电信号反射会在雷达地图中产生伪影,而且3D地图投影到2D时会受到雷达方位波束的影响,导致地板和天花板反射也产生伪影。Radarize尝试解决伪影问题。(建图模块则会处理这个热力图,去除不需要的反射信号(比如来自地板或天花板的信号))
Radarize的原理是基于FMCW雷达信号的特性,使用了几个模块来处理雷达数据和生成全局地图和机器人轨迹。预处理模块将雷达I/Q帧转换为热力图,跟踪模块识别出平移和旋转,建图模块抑制垂直反射并对热力图中的反射体进行分割等步骤,最后通过SLAM后端生成全局地图和轨迹估计。
与其他雷达SLAM方法相比,Radarize在以下方面表现更为出色:
- 在没有使用IMU的情况下,其性能和泛化能力都超越了多传感器方案。
- 在Out-of-Distribution(OOD)(不同于训练数据分布)运动情况下,Radarize的泛化性能更好。
- 在轨迹精度上,Radarize的轨迹更接近真实值。
总的来说,Radarize通过有效处理雷达数据和提出的解决方案,在解决现有雷达SLAM中存在的问题上取得了较好的性能表现,尤其在灵活性、精度和泛化性方面表现优异。















 2828
2828











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









