






一、从相平面和相轨迹理解
相平面与相轨迹:用直观的图形来分析微分方程。
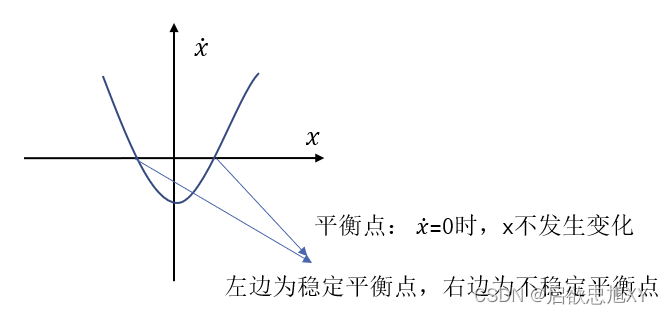
如果一个系统满足x’=-cx,则系统最终可以稳定。
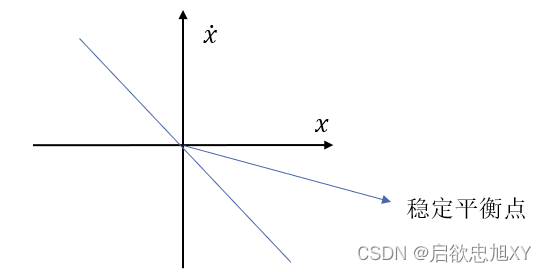
这就可以看作滑膜面,滑膜控制的目的就是使得系统状态变量趋向滑模面,最终使得系统稳定。
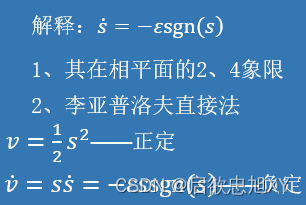
现在的目的就是使s=0,采用李亚普洛夫直接法 :

选取合适的s‘使得V’负定
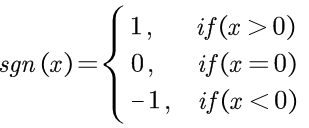
常用的符号函数
二、 程序分析
2.1一阶滑模源代码
%% system
c=0.4;
Xi=0.1;
k=1;
d_t=0.5;
% condition
x_1=10;
x_2=0;
m=2;
u=0;
%% circulate
amount=200;
stroage_x=zeros(1,amount);
stroage_u=zeros(1,amount);
stroage_i=0.5:0.5:amount/2;
for i=1:amount
%stroage
stroage_x(i)=x_1;
stroage_u(i)=u;
s=x_2+c*x_1;
u=0.5*k*x_2^2-c*x_2*m-Xi*m*sgn(s);
dot_x_2=(u-0.5*k*x_2^2)/m;
%iteration
x_2=x_2+dot_x_2*d_t;
x_1=x_1+x_2*d_t;
end
%% draw
subplot(2,1,1)
plot(stroage_i,stroage_x);
xlabel('t(s)')
ylabel('position(m)')
subplot(2,1,2)
plot(stroage_i,stroage_u);
xlabel('t(s)')
ylabel('u(N)')
%% sgn
function value=sgn(s)
if s>0
value=1;
elseif s<0
value=-1;
else
value=0;
end
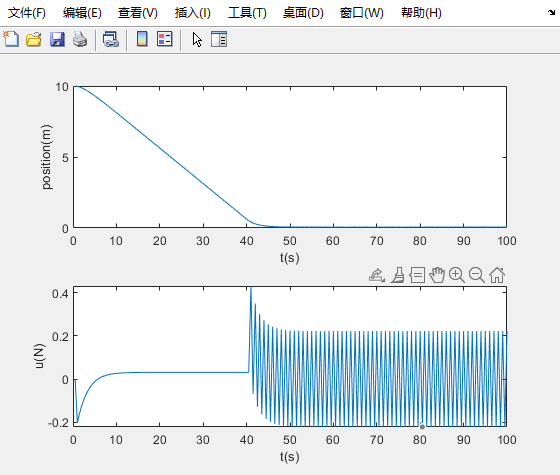
end2.2效果图

















 5319
5319

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









