







今天分享的是人形机器人系列深度研究报告:《人形机器人专题:人形机器人感知层核心,传感器成长可期》。
(报告出品方:国泰君安证券)
报告共计:55页
传感器:控制系统核心部件,市场空间较为广阔
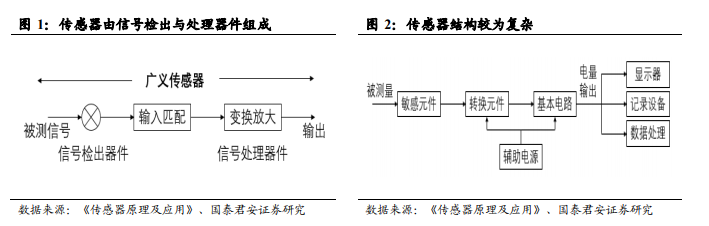
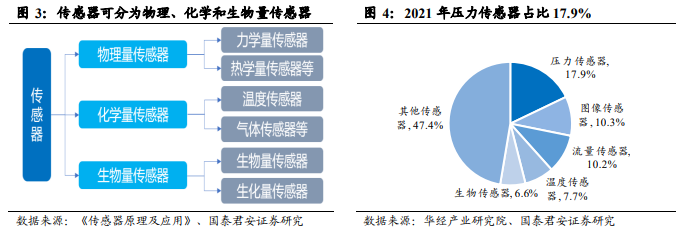
传感器是自动化检测技术和智能控制系统的重要部件。传感器是能够把 特定的信息(物理、化学、生物)按一定规律转换成某种可用信号输出 的器件和装置。广义上的传感器一般由信号检出器件与信号处理器件两 部分组成,从而转化感知到的模拟信号并使之以电信号的形式显示。传感器一般由敏感元件、转换元件和基本电路组成。敏感元件感受被测量的状态,转换元件将相应的被测量转换成电参量,而基本电路将电参量 接入电路并转换成电量。传感器的核心部分是转换元件,其决定了传感 器的工作原理。
传感器分类较多,压力传感器占比最大。传感器可按检测对象分为物理 量、化学量以及生物量传感器,下含力学量传感器、热学量传感器、光 学量传感器、温度传感器、生物量传感器等共 11 个小类。检测对象的信 号形式决定了选用传感器的类型,在机械自动化与工业过程控制中,常见的信号形式包括位移、(加)速度、扭矩、力、振动、温度、湿度等。 目前我国压力传感器和图像传感器占比稳步提升,2021 年分别占比 17.9% 和 10.3%,是目前国内占比最高的两种传感器。
传感器产品下游应用广泛,人形机器人对传感器依赖程度高。据 CCID 数据,我国传感器产品最大下游领域为汽车电子,占比达到 24.2%,其 次为工业制造领域,占比为 21.1%,位列三到五名的下游行业为网络通 信、消费电子和医疗电子,占比分别为 21.0%、14.7%、7.2%。为模拟人 类感知&#x
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 951
951











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









