






来源:北京交通工程学会
01 前言
北京工业大学驾驶行为实验室赵晓华教授带领团队完成基于驾驶模拟技术的L3级自动驾驶接管实验测试。团队面向驾驶人和自动驾驶车辆提出自动驾驶接管实验测试研究框架,基于驾驶模拟器自主研发L3级自动驾驶接管实验测试平台,并以接管场景、接管请求时间、非驾驶相关任务、交通流状态为要素设计了 18 个自动驾驶接管情景。通过驾驶模拟实验,深入探究驾驶人的接管行为及其影响要素,为驾驶人接管行为的影响机理挖掘和自动驾驶车辆人机交互优化提供支持。研究基于驾驶模拟技术开发自动驾驶实验测试平台的方法具有可推广性,研究结果可为深度挖掘自动驾驶接管行为的影响因素及其作用机理奠定基础。
实验测试视频
该实验视频由北京工业大学驾驶行为实验室录制和制作,再现了高速公路典型场景中驾驶人接管自动驾驶车辆的驾驶行为表现和车辆运行特征。
02 研究背景
自动驾驶技术已被证实可为改善交通系统安全性、顺畅性、生态性、舒适性等问题带来新机遇。L3 级自动驾驶允许驾驶人在自动驾驶过程中将情景意识和控制力脱离驾驶任务,但须在自动驾驶系统即将失效或超出系统功能范围时快速恢复驾驶情景意识和控制力实现车辆的接管。传统以车辆为核心的测试方法不能满足自动驾驶技术安全测试的全部需求,亟需以场景和人因为核心的测试方法。驾驶模拟器面向自动驾驶中人因测试具有场景和事件可控、易于获取细粒度、多维度、高精度的驾驶操控和车辆运行数据等优势,其在人因研究中的有效性已得到国内外众多研究的证实。也有驾驶模拟相关研究表明,在人机共驾环境下,驾驶人的接管行为直接影响驾驶过程的安全性。鉴于此,北京工业大学驾驶行为实验室基于驾驶模拟器研发L3级自动驾驶接管实验测试平台,面向驾驶人和自动驾驶车辆提出自动驾驶技术的实验测试研究框架,以支撑自动驾驶技术面向人因的系列测试。
03 实验平台
面向驾驶人和自动驾驶车辆提出 L3 级自动驾驶实验测试研究框架,由 6 部分组成(图 1)。旨在系统性地分析驾驶人对自动驾驶技术的适应性以及自动驾驶车辆的性能。
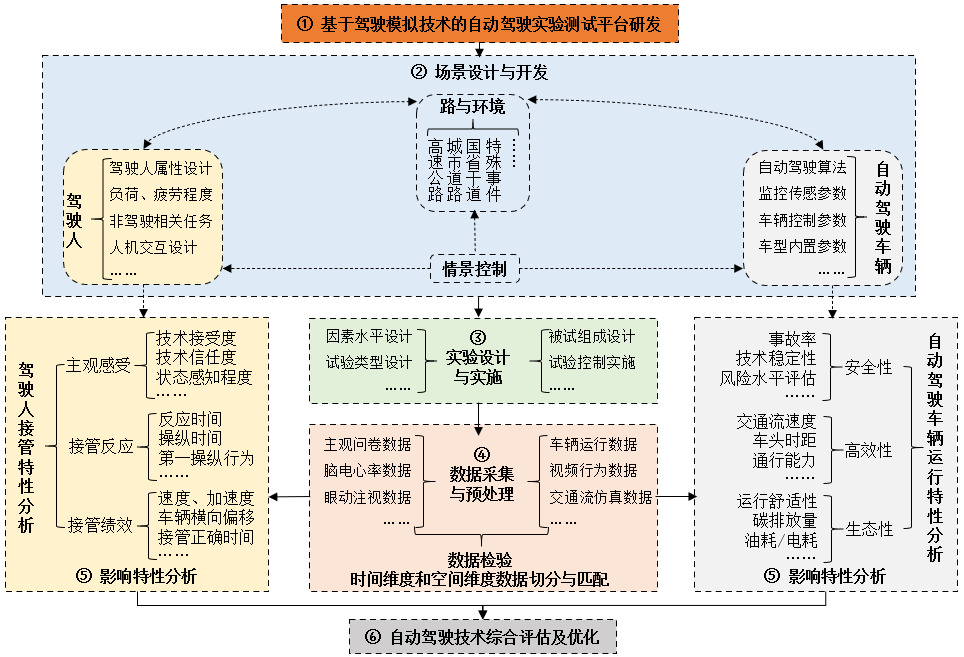
图1 自动驾驶实验测试研究框架
研究框架由图 1 所示六部分组成。
①基于驾驶模拟技术的自动驾驶实验测试平台,测试平台是自动驾驶技术实验测试的基础,可实现面向驾驶人和自动驾驶车辆的一般性测试。
②场景设计与开发,基于测试平台和 3D Max 等软件实现高速公路、城市道路等多种道路与环境的数字再现,仿真实现不同场景与事件;从驾驶人层面考虑不同人群属性、工作负荷、疲劳程度、非驾驶相关任务以及基于车载智能终端不同设计特点的人机交互功能;从自动驾驶车辆层面考虑设置自动驾驶算法和其它参数仿真不同种类的自动驾驶车辆,通过情景控制实现道路交通场景、驾驶人层面和自动驾驶车辆间的动态联动控制。
③实验设计与测试,通过合理设计实验支持探究多因素的作用特性和机理挖掘。
④数据采集与处理,在开展驾驶模拟实验前、中、后进行面向人因和车辆的数据采集,从主客观维度采集高精度、细粒度的数据,完成数据检验与预处理。
⑤影响特性分析,探究驾驶人对自动驾驶车辆的接管特性,测试评估自动驾驶车辆性能,深度挖掘自动驾驶车辆运行特性的影响机理。
⑥自动驾驶系统综合评估及优化,分别从驾驶人特性和车辆运行层面,实现自动驾驶系统的综合评估及优化。
图2展示了基于驾驶模拟技术的L3级自动驾驶接管实验测试平台的结构和设备组成。

(a) 平台结构
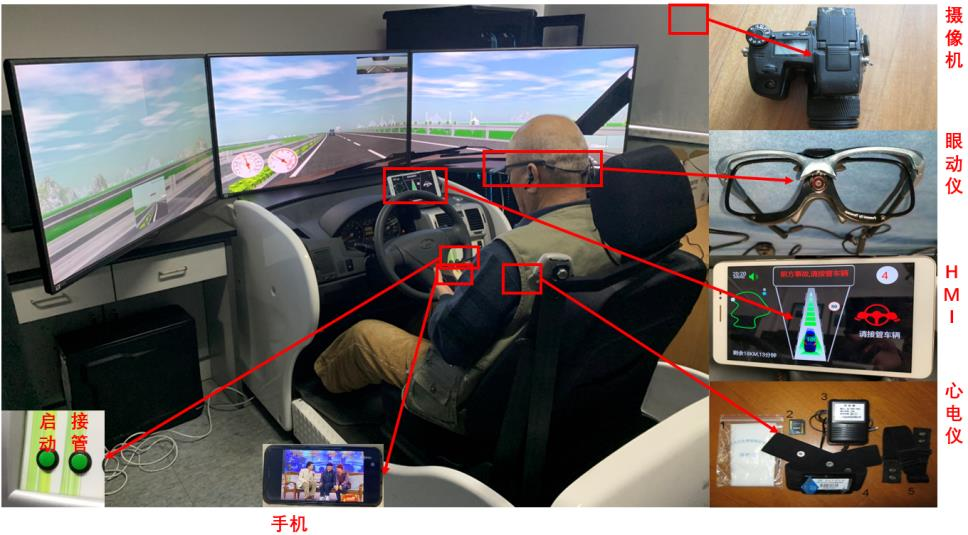
(b) 实验设备
图2 平台结构及实验设备
L3 级自动驾驶实验测试系统设备采用北京工业大学 AutoSimAS 驾驶模拟系统,硬件系统主要包括驾驶模拟设备、高性能计算机 6 台、华为平板、眼镜式眼动仪、心电仪等设备;软件系统主要是驾驶模拟器内置软件 SCANeR1.9 系统,结合场景开发软件、平板安卓系统等实现虚拟场景设计与开发,包含道路环境构建、系统参数设置、典型事件控制、人机交互系统等功能,虚拟场景植入驾驶模拟系统,通过应用程序接口(Application Program Interface, API)添加天气、交通量等场景要素。驾驶模拟系统可动态采集坐标、速度、横向偏移等车辆运行和操纵数据,数据采集频率设为 20Hz,结合眼动仪、心电仪、摄像机等数据采集设备实现测试数据的同步采集与预处理。基于用户数据协议接口(User Data Protocol Interface, UDP)实现驾驶模拟器中控平台与数据协同处理中心的数据交互,通过无线通信(Wi-Fi)实现数据协同处理中心与智能车载终端的信息传递与互联互通(图 2)。
04 实验设计
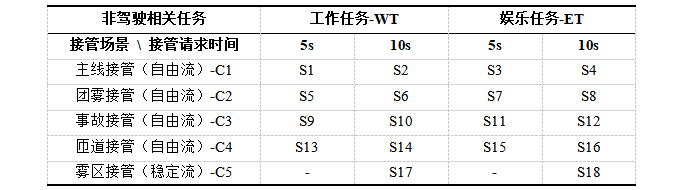
面向高速公路选择常见的4种场景(图 3):主线接管(C1)、团雾接管(C2)、事故接管(C3)、匝道接管(C4),C1-C4 设为自由流状态。为探究交通流状态的影响,在团雾接管场景中增设稳定流(C5),结合接管请求时间和非驾驶相关任务共组成 18 种接管情景(Scenario)组合(表 1)。雾区限速 60km/h,匝道限速 40km/h,普通路段限速 120km/h。自动驾驶车辆巡航速度为 100km/h,驾驶人接管车辆后根据道路限速行驶,由手动驾驶模式切换至自动驾驶模式后,车辆会逐渐恢复至速度100km/h。
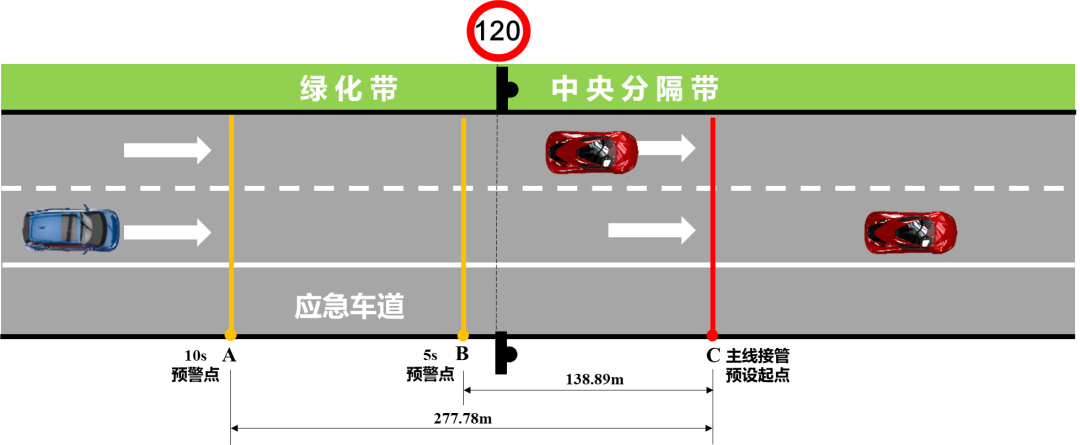
(a) 主线接管-C1
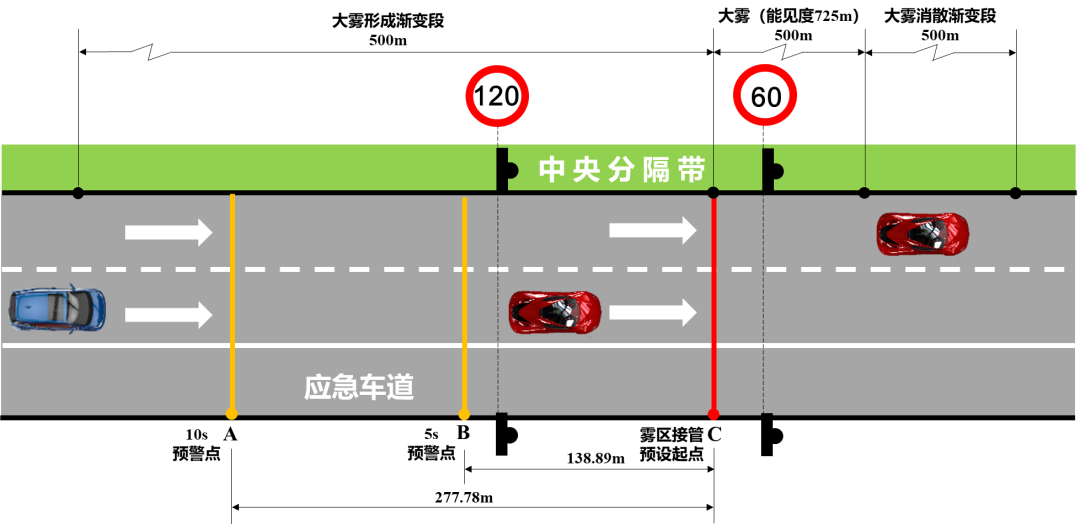
(b) 团雾接管-C2
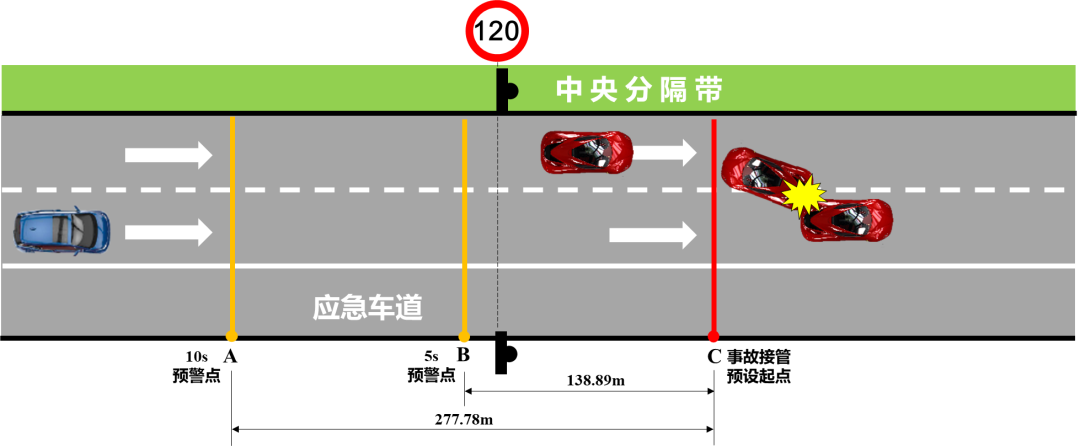
(c) 事故接管-C3
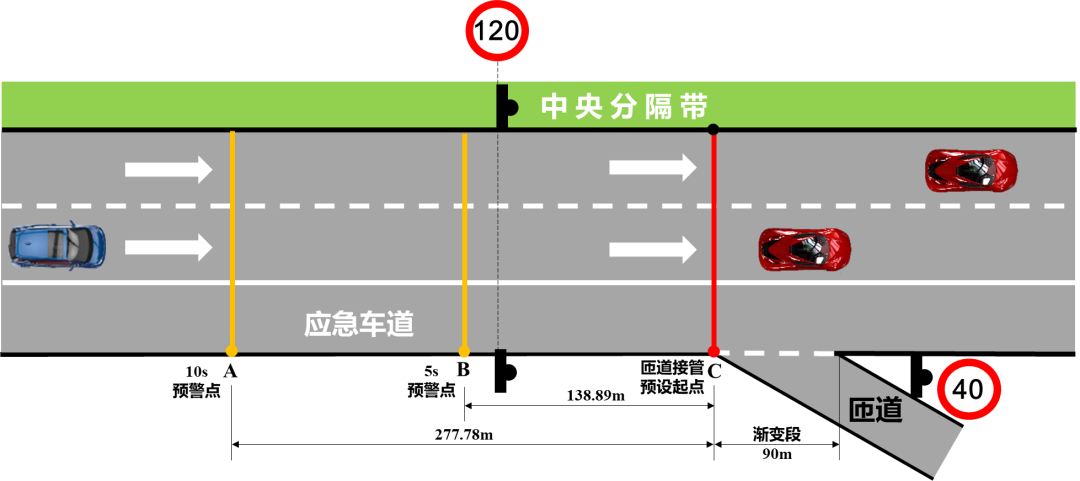
(d) 匝道接管-C4
图3 接管场景示意图
(道路结构仅为不同道路场景示意,非交通工程标准设计图)
表1 接管情景组合及编号
为降低场景关联度和驾驶人学习效应,18 个接管场景随机布设到2条路径(图4),路径1为内蒙古草原高速风格(22km),路径2为北京城郊高速风格(22km)。
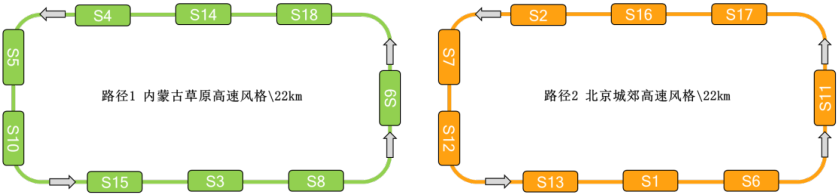
(a) 路径1 (b) 路径2
图4 路径1和路径2接管情景布设
基于平板开发人机交互界面(Human-Machine Interface,HMI)提供视觉和听觉结合的接管请求信息,共设计4种 HMI 界面类型(图 5)。共邀请42名视力、听力良好且有驾驶技能的被试开展驾驶模拟实验。
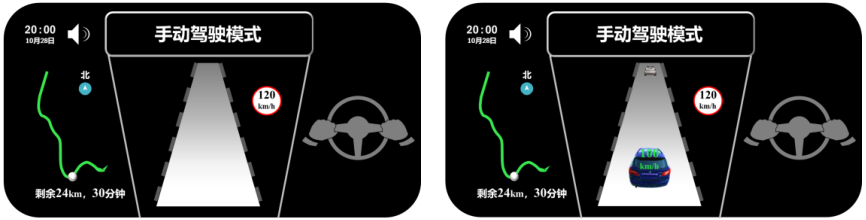
(a) 手动驾驶模式-自动驾驶功能不可用 (b) 手动驾驶模式-自动驾驶功能可用
(c) 自动驾驶模式-自动驾驶功能已激活 (d) 自动驾驶模式-请求接管预警
图5 HMI 界面设计
实验设计中两个重要变量为接管请求时间和非驾驶相关任务。接管请求时间是本车发出接管请求预警后与前方事件即将碰撞时间(Time to Collision,TTC),代表接管情景的紧急程度。非驾驶相关任务是指车辆在自动驾驶过程中驾驶人可进行的非驾驶任务的活动。研究中接管请求时间分别设定为 5s、10s 两种,非驾驶相关任务包括娱乐任务(看休闲娱乐视频)和工作任务(微信发语音汇报工作)。
05 案例研究一 :不同场景下自动驾驶接管行为综合评估
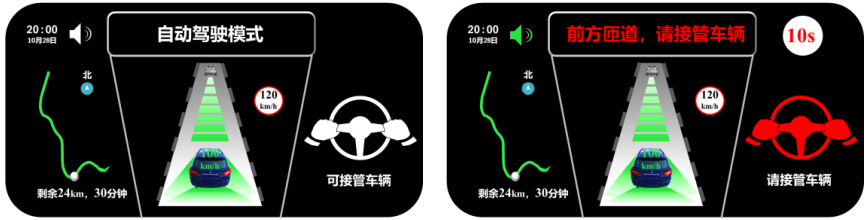
研究案例系统性地评估了驾驶人的接管行为及其影响因素,接管行为评估的指标提取、计算范围及评价指标体系如图6所示。分析中采用显著性检验方法探究驾驶人主观感受及接管行为差异。
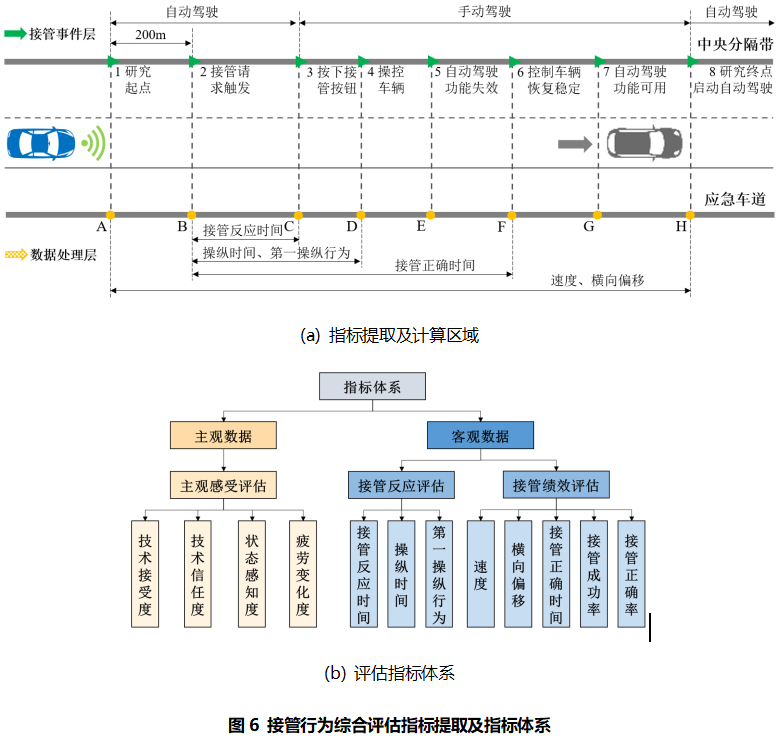
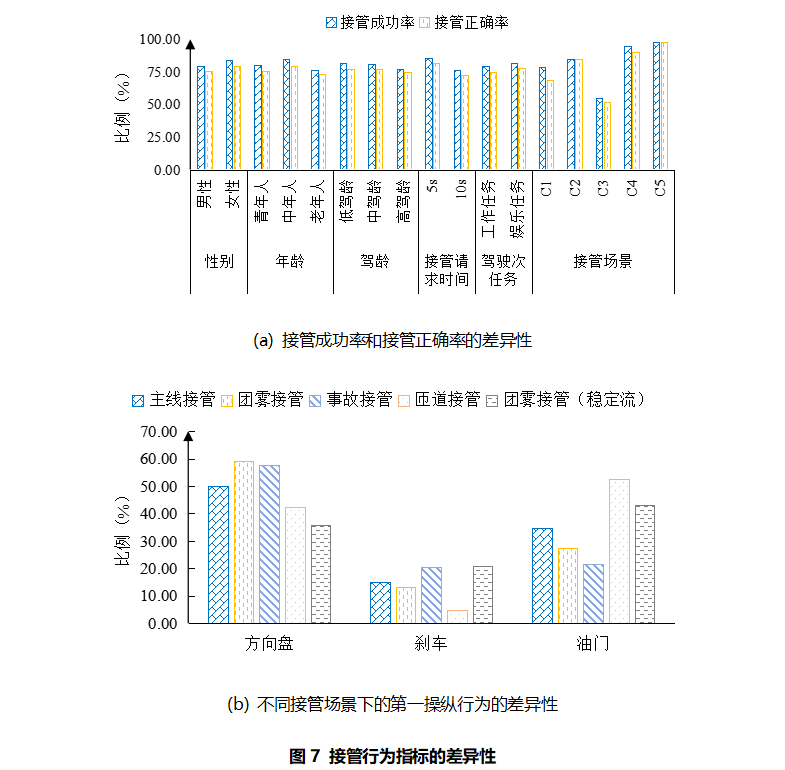
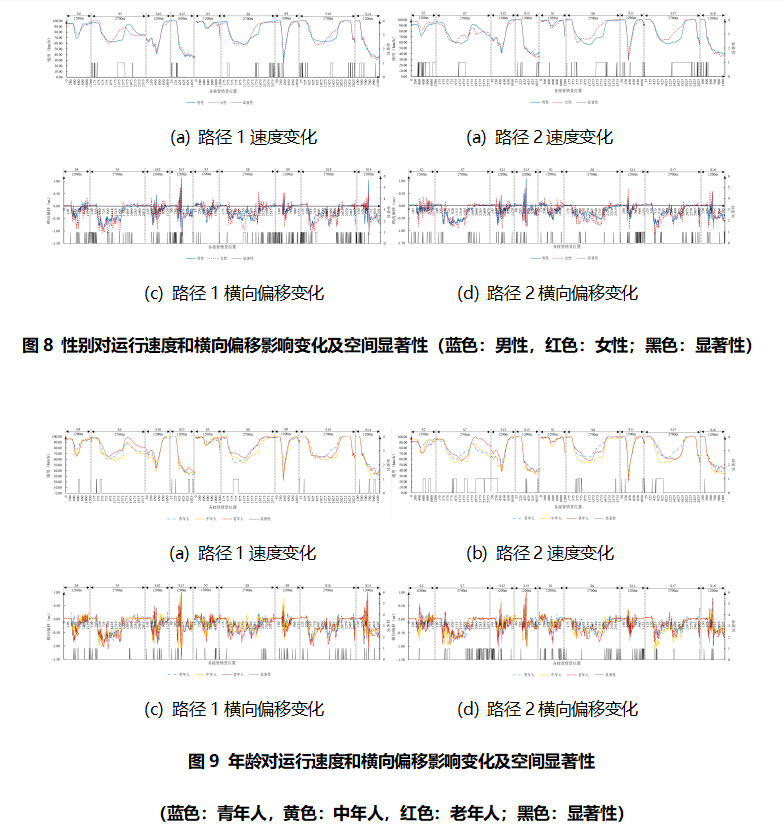
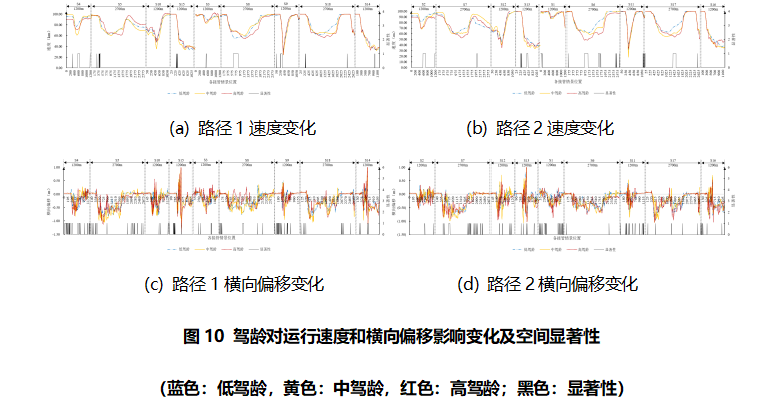
其中,接管成功率、接管正确率和第一操纵行为是评估驾驶人接管行为的直观指标,探究驾驶人属性(性别、年龄、驾龄)和接管情景因素(接管场景、接管请求时间、非驾驶相关任务)对接管成功率和接管正确率的影响差异;第一操纵行为是驾驶人为规避前方紧急事件而采取的第一反应和举措,图7给出了接管行为指标的差异性。为深入研究驾驶人属性因素(性别、年龄、驾龄)对接管过程指标的影响,图8-图10绘制路径1和路径2中各接管情景研究区域中,运行速度和横向偏移的时间变化曲线及空间显著性。
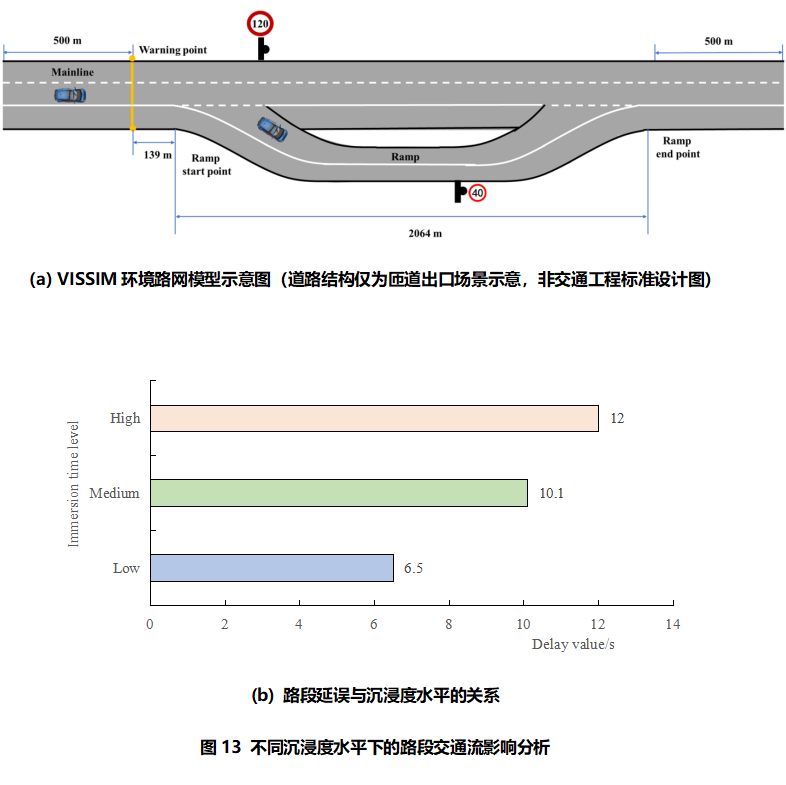
06 案例研究二:非驾驶相关任务沉浸度对匝道出口场景接管行为的影响
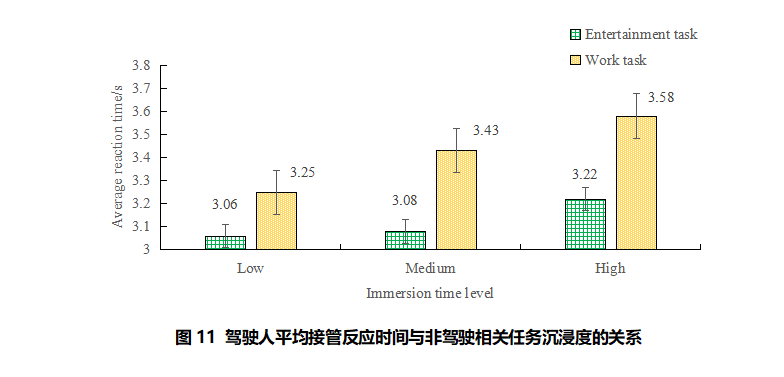
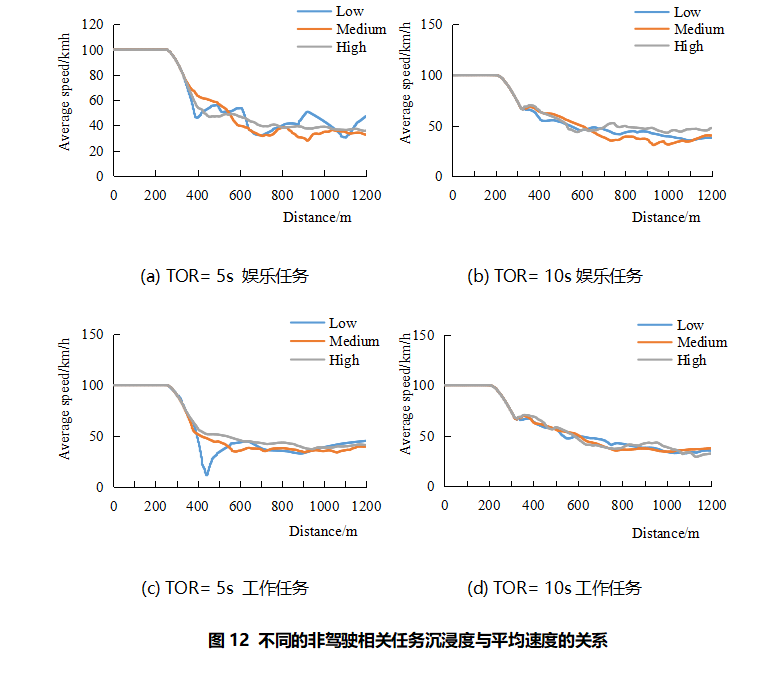
非驾驶相关任务是指自动驾驶状态下驾驶人所进行的非驾驶相关活动,非驾驶相关任务沉浸度是自动驾驶状态下驾驶人所进行的非驾驶相关的生心理沉浸程度,当车辆发出接管请求时驾驶人需将注意力脱离非驾驶任务恢复驾驶情景意识接管车辆。探究非驾驶相关任务沉浸度对接管过程的影响是L3级自动驾驶接管行为研究的重要内容。针对匝道出口场景的接管行为得到含有不同接管反应时间和接管请求时间的驾驶模拟实验数据。可用非驾驶任务的持续沉浸时间对沉浸度(Low,低沉浸度;Medium,中沉浸度;High,高沉浸度)进行表征和度量,基于K-means算法,对不同沉浸时间的非驾驶相关任务进行聚类。选取运行速度、横向偏移量和油门踏板深度三个指标描述接管性能。分析沉浸时间对接管反应时间的影响(图11),通过标定不同沉浸度下的接管反应时间并嵌入VISSIM仿真参数,建立VISSIM仿真模型分析不同沉浸时间对路段交通运行状态的影响。接管过程中,不同沉浸度的驾驶人接管性能不同(图12)。在接管过程中,驾驶人的接管速度和油门踏板操作强度与接管紧迫性呈负相关。非驾驶相关任务的沉浸时间对路段交通运行效率有不同程度的影响。随着沉浸度的提高,车辆在路段上的平均延误也有所增加(图13)。
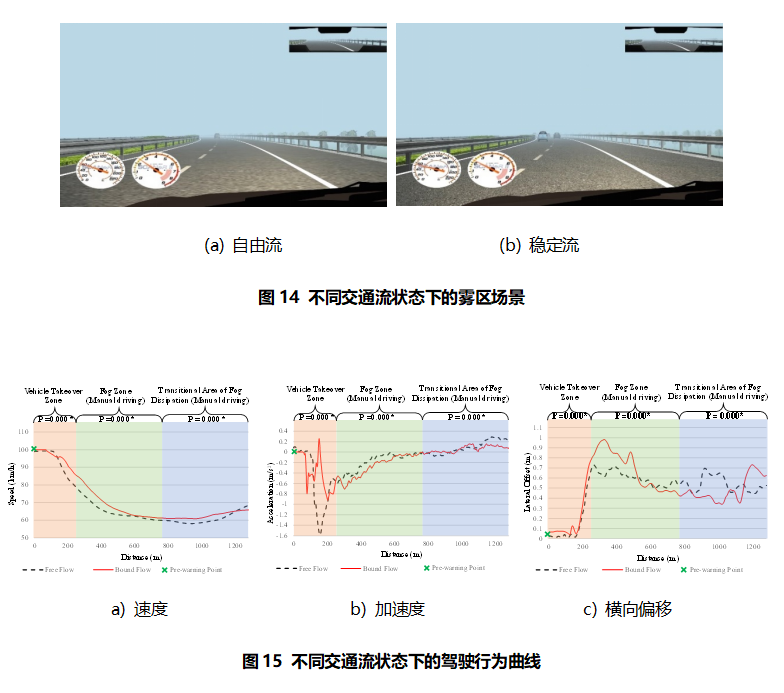
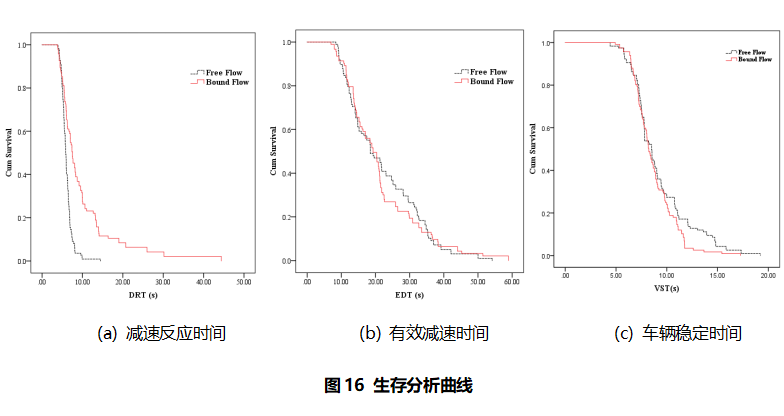
07 案例研究三:不同交通流条件对高速公路雾区场景接管行为的影响
自由流和稳定流是两种典型的交通流状态,自由流车辆几乎不受跟驰约束,车辆可以在道路基于期望速度自由行驶,稳定流车辆受到前车行为约束,时而处于跟驰状态。实验设置自由流密度为6 pcu/km/lane,稳定流密度为20 pcu/km/lane。研究不同交通流状况(自由流和稳定流)下L3级自动驾驶车辆的驾驶人在高速公路雾区路段的驾驶行为。基于驾驶模拟实验,提取2种交通运行状况和2项非驾驶相关任务下的驾驶行为数据(图14),采用Wilcoxon符号秩检验和生存分析探讨其对驾驶人接管行为的影响。结果表明,不同非驾驶相关任务对驾驶行为的影响主要集中在接管过程;自由流的减速反应时间(6.04s)明显小于稳定流状态的减速反应时间(9.40s);在稳定流条件下,驾驶人更倾向于让车辆自由减速,踩刹车踏板和油门踏板行为减少(图15)。本研究的潜在应用领域包括有条件自动驾驶的安全评估和自动驾驶政策的制定。从生存分析结果来看(图16),雾区稳定流条件下驾驶人不减速的概率始终高于自由流条件下。不同交通流条件对EDT(有效减速时间)和VST(车辆稳定时间)的影响不显著。综上所述,L3级自动驾驶车辆在雾区场景接管时,自由流行驶的安全性高于稳定流场景。
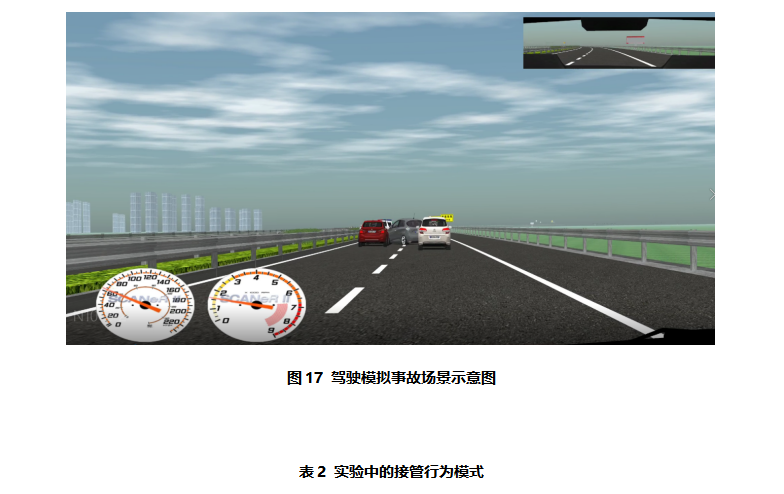
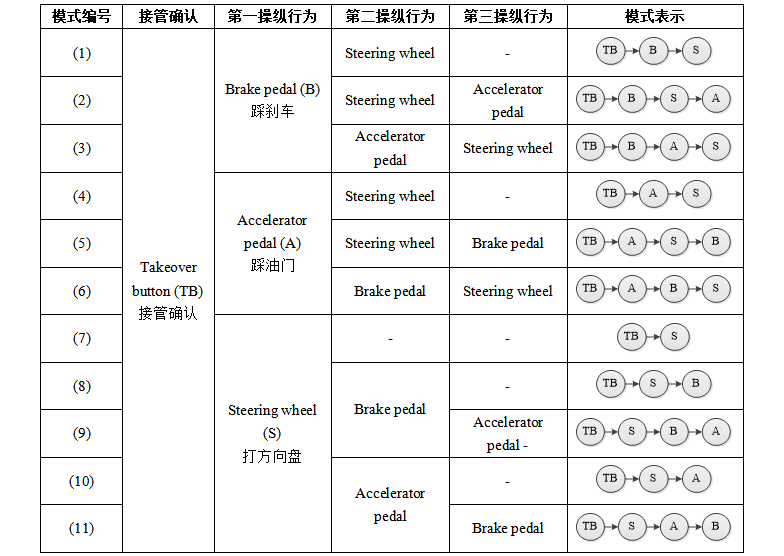
08 案例研究四:事故场景下L3级自动驾驶接管行为模式研究
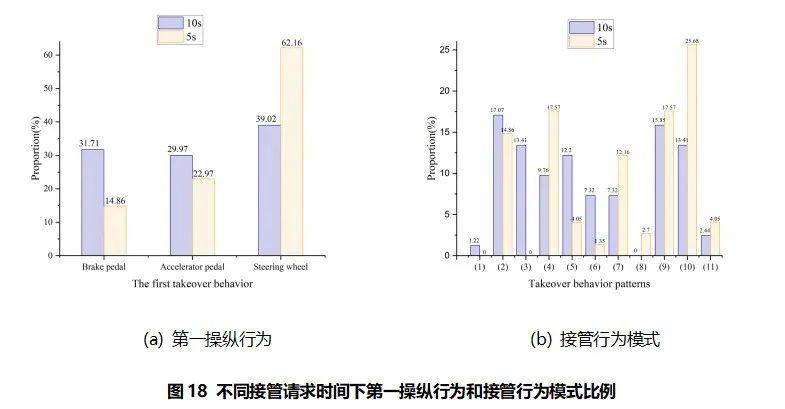
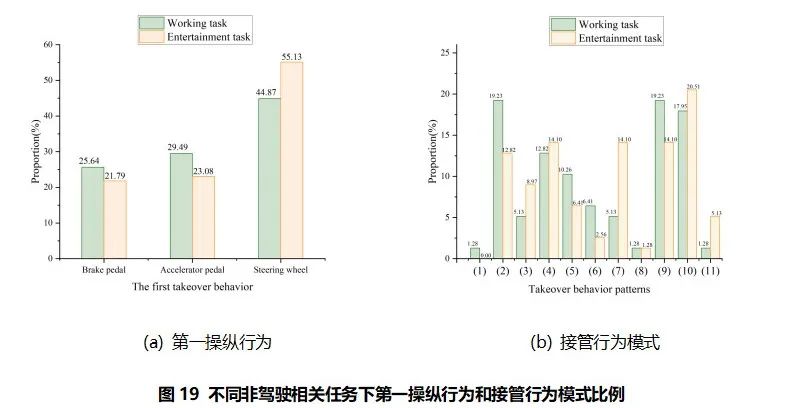
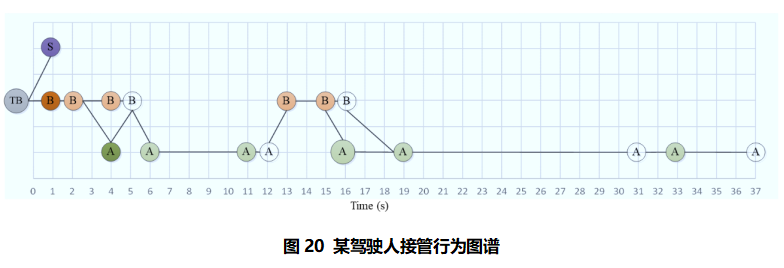
接管行为模式是指驾驶人从自动驾驶接管车辆至手动驾驶过程中开始刹车、加速或转向的行为顺序和组合模式。定义并识别L3级自动驾驶的接管行为模式有助于解释驾驶人接管行为模式和影响机理。研究事故场景影响下接管行为模式(图17),通过驾驶模拟实验,总结3种第一操纵行为和11种接管行为模式(表2、图18、图19)。结果表明,第一操纵行为对第一操纵反应时间、速度、横向偏移量和最小TTC有显著影响,但对接管正确时间无显著影响。接管请求时间对接管行为模式和第一操纵行为有显著影响,而非驾驶相关任务对接管行为模式和第一操纵行为没有显著影响。同时,研究构建了接管操纵行为映射模型,更直观地展示了接管过程中的行为变化。以时间为横轴,以不同的驾驶行为为纵轴,构建了事故场景影响下的接管模式转移图,以直接描述驾驶人在不同模式下的接管行为(图20)。
09 总结
北京工业大学驾驶行为研究团队提出了L3级自动驾驶接管实验测试研究框架,介绍了基于驾驶模拟技术构建自动驾驶技术实验测试平台的技术方法,可为相关领域研究学者提供参考,并为自动驾驶测试提供支持。以实际案例分析接管行为的影响因素及影响模式,研究结论为深度挖掘自动驾驶接管行为作用机理奠定基础。研究团队将进一步深入挖掘驾驶模拟技术对于自动驾驶测试的研究支撑,攻克多模拟器联动等关键技术,充分考虑自动驾驶中的人因因素,围绕自动驾驶接管绩效、人机交互、类人决策、通行规则、混驾编队等研究内容,驾驶模拟技术与交通仿真系统相结合,开展多级别自动驾驶的综合评测及优化,探索提升道路交通系统的安全性、生态性、顺畅性、舒适性的技术方法与管控策略。
文稿:李海舰、赵晓华、李振龙、陈浩林
审校:荣建
联系人:
李海舰(lihaijian@bjut.edu.cn)
李振龙(lzl@bjut.edu.cn)
更多结果请参考如下文献:
[1]赵晓华,陈浩林,李振龙*,李海舰,巩建国,付强.不同情景下自动驾驶接管行为的影响特征[J].中国公路学报,2022,35(09):195-214.
[2]王彦峰,陈浩林,赵晓华*,李海舰,李振龙,付强.驾驶次任务沉浸等级对接管行为的影响分析[J].交通信息与安全,2022,40(01):135-143.
[3]Haijian Li, Junjie Zhang, Zhonghua Liu, Jianguo Gong, Xiaohua Zhao*. Impact of Secondary Task Immersion Duration on Take-Over Process of Conditional (L3) Automated Vehicles in an Off-Ramp Area. Transportation Research Record Journal of the Transportation Research Board, 2022, 1-14.
[4]Haijian Li, Yuxuan Li, Kaiqun Chen, Qiuhong Wang, Xiaohua Zhao*. Driving Behavior of L3 Autonomous Vehicle Drivers in Fog Zones under Different Traffic Flow Conditions. Measurement, 2022.
[5]Haijian Li, Haina Zhao, Chong Li, Qiuhong Wang, Xiaohua Zhao*. Takeover behavior patterns for autonomous driving in crash scenarios. Journal of Transportation Safety & Security, 2022.
[6]Haolin Chen, Xiaohua Zhao, Zhenlong Li*, Jianguo Gong, Qiuhong Wang. Studying Driver's Situational Awareness Arousal and Takeover Performance in Autonomous Driving, TRB Annual Meeting, 2023.
扫描加入免费的「智慧城市之智慧交通」知识星球可了解更多行业资讯和资料。
欢迎加入智能交通技术群!
联系方式:微信号18515441838

















 2603
2603

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









