







带有纯延迟的单回路控制系统如图1所示,其闭环传递函数为:

其特征方程为:


图1 有纯延迟的单回路控制系统
可见,特征方程中出现了纯延迟环节,使系统稳定性降低,如果 足够大,系统将不稳定,这就是大延迟过程难于控制的本质。而
足够大,系统将不稳定,这就是大延迟过程难于控制的本质。而 之所以在特征方程中出现,是由于反馈信号是从系统的a点引出来的,若能将反馈信号从b点引出,则把纯延迟环节移到控制回路的外边,如图2所示,经过的延迟时间后,被调量Y将重复X同样的变化。
之所以在特征方程中出现,是由于反馈信号是从系统的a点引出来的,若能将反馈信号从b点引出,则把纯延迟环节移到控制回路的外边,如图2所示,经过的延迟时间后,被调量Y将重复X同样的变化。
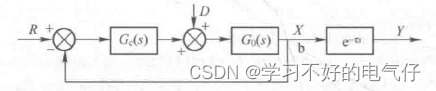
图2 改进的有纯延迟的单回路控制系统
由于反馈信号X没有延迟,系统的响应会大大地改善。但在实际系统中,b点或是不存在,或是受物理条件的限制,无法从b点引出反馈信号来。针对这种问题,Smith提出采用人造模型的方法,构造如图3所示的控制系统。
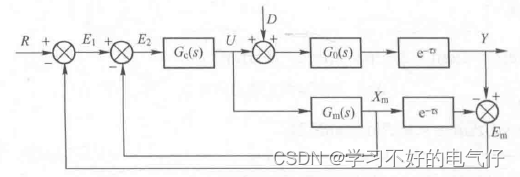
图3 Smith预估控制系统
如果模型是精确的,即 G0(s)=Gm(s), ,且不存在负荷扰动(D=0),则Y=Ym,Em=Y-Ym=0,X=Xm,则可以用Xm代替X作第一条反馈回路,实现将纯延迟环节移到控制回路的外边。如果模型是不精确的或是出现负荷扰动,则X就不等于Xm,Em=Y-Ym≠0,控制精度也就不能令人满意。为此,采用E实现第二条反馈回路。这就是Smith预估器的控制策略。
,且不存在负荷扰动(D=0),则Y=Ym,Em=Y-Ym=0,X=Xm,则可以用Xm代替X作第一条反馈回路,实现将纯延迟环节移到控制回路的外边。如果模型是不精确的或是出现负荷扰动,则X就不等于Xm,Em=Y-Ym≠0,控制精度也就不能令人满意。为此,采用E实现第二条反馈回路。这就是Smith预估器的控制策略。
实际上预估模型不是并联在过程上,而是反向并联在控制器上的,因此,将图3变换可得到 Smith预估控制系统等效图,如图4所示。
显然,Smith 控制方法的前提是必须确切地知道被控对象的数学模型,在此基础上才能建立精确的预估模型。
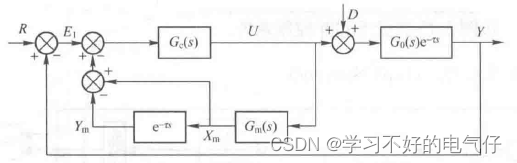
图4 Smith预估控制系统等效图
仿真实例:
被控对象为:

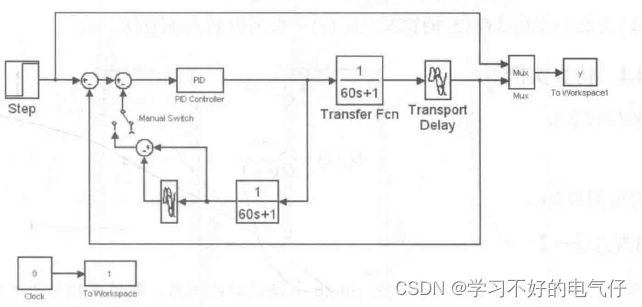
采用 Smith控制方法,按图3的结构进行设计。在 PI控制中,取k。=4.0,k=0.022,假设预测模型精确,阶跃指令信号取100。Simulink仿真程序及仿真结果如图5和图6所示,仿真结果表明,Smith控制方法具有很好的控制效果。
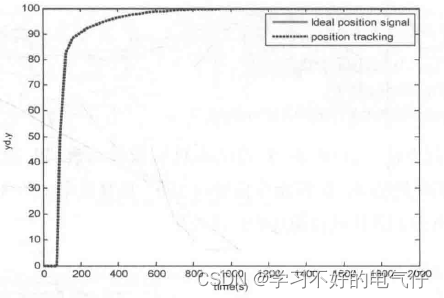
图5 采用Smith补偿的阶跃响应
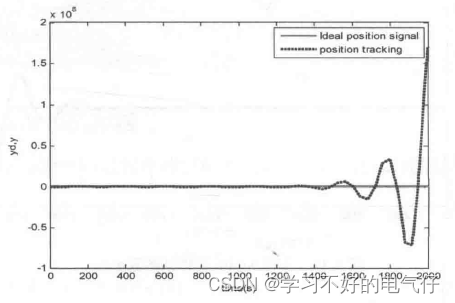
图6 不要Smith补偿的阶跃响应
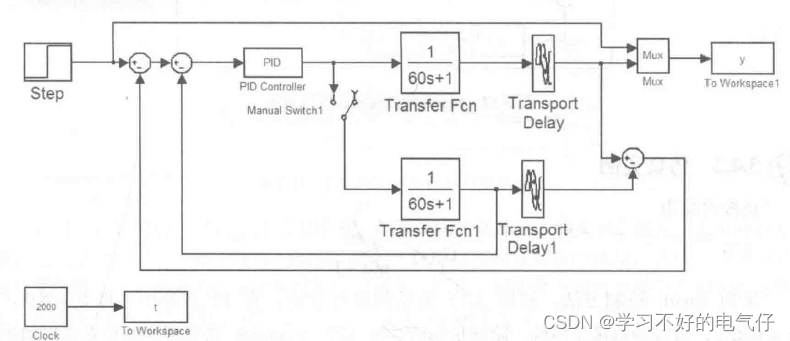
按照图3设置的Smith控制系统:
作图程序:chap3_4plot.m
close all;figure(1);
plot(t,y(:,1),t',tY(:,2),k:' linewidth', 2);xlabel('time(s)':ylabel('yd,y');
legend('ldeal position signal','position tracking');
采用Smith控制方法,按图 4的结构进行设计。在PI控制中,取kp=4.0 ,ki=0.022,假设预测模型精确,阶跃指令信号取100。仿真结果如图7和图8所示,仿真结果表明,Smith控制方法具有很好的控制效果。
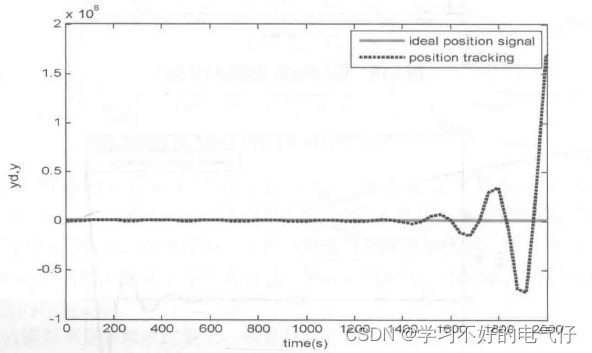
图7 不要Smith补偿的阶跃响应
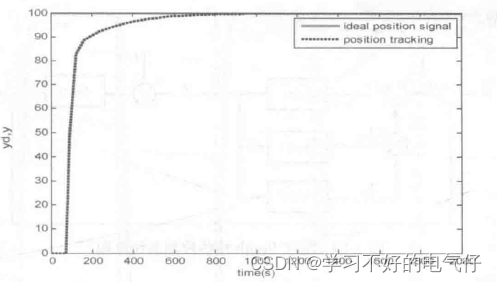
图8 采用Smith补偿的阶跃响应
按照图4设计Smith控制系统:
作图程序:chap3_5plot.m
close all;figure(1);
plot(L,y(:,1),'r',t,y(:,2),'k:',linewidth',2);xlabel('time(s)');ylabel('yd.y');
legend( 'ideal position signal','position tracking');



















 2675
2675

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











