






 本文介绍了Smith预估补偿原理,用于解决控制系统中的延迟问题,特别是网络控制系统。通过Matlab Simulink搭建模型,展示了Smith预估补偿如何改善系统稳定性,即使在存在控制和传感器延迟的情况下。实验结果表明,加装Smith补偿的控制系统能保持稳定,但存在滞后。然而,该方法对模型匹配和延迟的精确性要求较高,鲁棒性不足,适合于模型精确的系统。
本文介绍了Smith预估补偿原理,用于解决控制系统中的延迟问题,特别是网络控制系统。通过Matlab Simulink搭建模型,展示了Smith预估补偿如何改善系统稳定性,即使在存在控制和传感器延迟的情况下。实验结果表明,加装Smith补偿的控制系统能保持稳定,但存在滞后。然而,该方法对模型匹配和延迟的精确性要求较高,鲁棒性不足,适合于模型精确的系统。
前言
实际设计控制器时,不可避免会有延迟,包括控制延迟和传感器延迟,当延迟比较大时,可能会造成控制器失稳。因此在控制器设计时,需要考虑延迟的影响。这个问题在网络控制系统(Networked Control system)尤为普遍,相应的解决方法也有很多。文章采用一个简单经典的解决办法——Smith预估补偿,先介绍原理,再在Simulink中实现
Smith 预估补偿原理
一个典型的控制环节如图1所示,
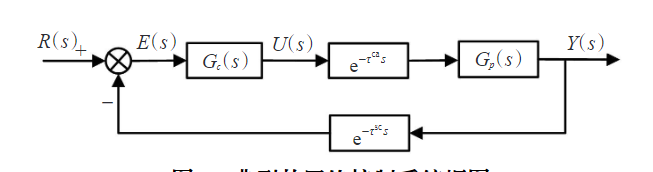
图1: 典型控制系统
系统延迟包括控制延迟
τ
c
a
\tau^{ca}
τca和传感器延迟KaTeX parse error: Undefined control sequence: \rau at position 1: \̲r̲a̲u̲^{sc}闭环传递函数为:
Y
(
s
)
R
(
s
)
=
G
c
(
s
)
G
p
(
s
)
e
−
τ
c
a
s
1
+
G
c
(
s
)
G
p
(
s
)
e
−
τ
s
c
s
e
−
τ
c
a
s
\frac{Y(s)}{R(s)}=\frac{G_{c}(s) G_{p}(s) \mathrm{e}^{-\tau^{c a_{s}}}}{1+G_{c}(s) G_{p}(s) \mathrm{e}^{-\tau^{sc}s} \mathrm{e}^{-\tau^{\mathrm{ca} }s}}
R(s)Y(s)=1+Gc(s)Gp(s)e−τscse−τcasGc(s)Gp(s)e−τcas
这里执行器以一阶系统为例,其传递函数为:
G
p
(
s
)
=
1
s
+
1
G_p(s)=\frac{1}{s+1}
Gp(s)=s+11
采用PID算法,器传递函数为:
G
c
(
s
)
=
K
p
(
(
K
d
K
p
)
s
2
+
s
+
(
K
i
K
p
)
)
s
=
K
p
(
T
d
s
+
1
+
1
T
i
s
)
G_{c}(s)=\frac{K_{\mathrm{p}}\left(\left(\frac{K_{\mathrm{d}}}{K_{\mathrm{p}}}\right) s^{2}+s+\left(\frac{K_{\mathrm{i}}}{K_{\mathrm{p}}}\right)\right)}{s}=K_{\mathrm{p}}\left(T_{\mathrm{d}} s+1+\frac{1}{T_{\mathrm{i}} s}\right)
Gc(s)=sKp((KpKd)s2+s+(KpKi))=Kp(Tds+1+Tis1)
其中,
K
p
,
T
d
,
T
i
K_p,T_d,T_i
Kp,Td,Ti分别为比例增益,微分时间常数和积分时间常数。选取控制器参数为
K
p
=
17.2
,
T
d
=
0
;
T
i
=
0.2
K_p=17.2,T_d=0;T_i=0.2
Kp=17.2,Td=0;Ti=0.2。
在系统中引入Smith估计器减少延迟的影响,控制框图如图2所示:

图2:Smith predictor结构
图中
τ
p
\tau_p
τp为系统总延迟,有
τ
p
=
τ
c
a
+
τ
s
c
\tau_p=\tau^{ca}+\tau^{sc}
τp=τca+τsc。
G
p
′
(
s
)
e
−
τ
p
′
s
G_{p}^{\prime}(s) e^{-\tau_{p}^{\prime} s}
Gp′(s)e−τp′s为引入的预估补偿传递函数。该结构的系统闭环传递函数为:
Y
(
s
)
R
(
s
)
=
G
c
(
s
)
G
p
(
s
)
e
−
τ
c
a
s
1
+
G
c
(
s
)
G
p
′
(
s
)
+
G
c
(
s
)
(
G
p
(
s
)
e
−
τ
p
s
−
G
p
′
(
s
)
e
−
τ
p
′
s
)
\frac{Y(s)}{R(s)}=\frac{G_{c}(s) G_{p}(s) e^{-\tau^{ca} s}}{1+G_{c}(s) G_{p}^{\prime}(s)+G_{c}(s)\left(G_{p}(s) e^{-\tau_{p} s}-G_{p}^{\prime}(s) e^{-\tau_{p}^{\prime} s}\right)}
R(s)Y(s)=1+Gc(s)Gp′(s)+Gc(s)(Gp(s)e−τps−Gp′(s)e−τp′s)Gc(s)Gp(s)e−τcas
当不存在模型失配,即
G
p
′
(
s
)
=
G
p
(
s
)
,
τ
p
′
=
τ
p
G_p^{\prime}(s)=G_{p}(s),\tau_{p}^{\prime}=\tau_{p}
Gp′(s)=Gp(s),τp′=τp,系统闭环传递函数简化为:
Y
(
s
)
R
(
s
)
=
G
c
(
s
)
G
p
(
s
)
1
+
G
c
(
s
)
G
p
(
s
)
e
−
τ
c
a
s
\frac{Y(s)}{R(s)}=\frac{G_{c}(s) G_{p}(s)}{1+G_{c}(s) G_{p}(s)} e^{-\tau^{ca} s}
R(s)Y(s)=1+Gc(s)Gp(s)Gc(s)Gp(s)e−τcas
观察可以发现,此时系统与没有延迟的系统相比,传递函数只是多乘上了
e
−
τ
c
a
s
e^{-\tau^{ca} s}
e−τcas。也就相当于闭环回路中不含滞后项,滞后环节也不会影响系统的特征方程,此时系统简化图如图3所示。也就是说经过Smith预测补偿后的系统与无延迟的系统相比,只是将控制过程推迟了时间
e
−
τ
c
a
s
e^{-\tau^{ca} s}
e−τcas。

图3: 简化后系统模型
Matlab实现
在Simulink中把加smith补偿和没加的都搭出来方便对比。由于比较简单,就不过多赘述,直接上图。
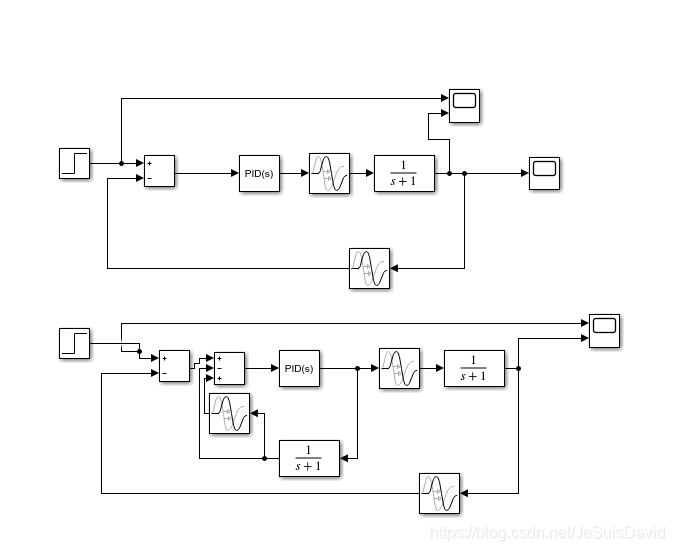
图4:Simulink实现
设置控制延时和传感器延时均为0.05s,仿真结果如图5所示。可以看到未加smith补偿的控制系统(左图)已经失稳,而加上smith补偿的控制系统的响应时稳定,只是有了0.05s的滞后。
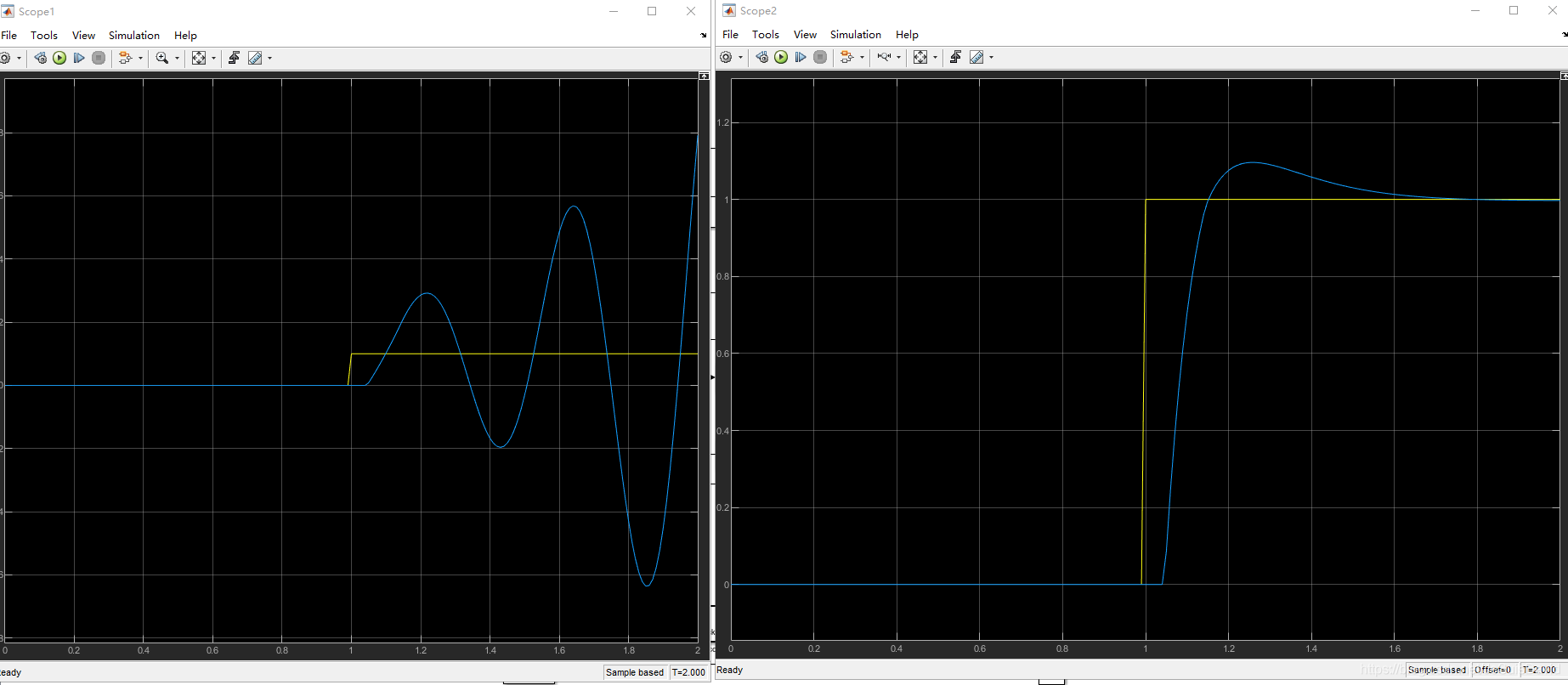
图5:两个模型节约二响应(左图:未加smith补偿,右图:添加smith补偿)
总结
由于上述的Smith 预估补偿器是建立在被控对象和网络延迟的精确数学模型之上,而在实际应用中,延迟有可能是随机的,并且Smith 预估模型可能存在扰动,使其不能完全和被控对象模型相匹配,因此这个方法的鲁棒性不强。改进方案也有很多,大致可以分为结构改进和参数整定两类,具体可以参考我下最后列出来的论文。
另外,除了Smith补偿控制,也有很多其他的方法,比如随机最优控制方法,增广状态确定性离散事件模型方法,缓冲队列方法等等。
参考文献
[1]张海涛,李珍.基于Smith预估补偿的网络控制系统仿真研究[J].计算机工程与应用,2012,48(08):243-245.
[1]李珍. 网络化控制系统的延迟补偿研究[D].河南科技大学,2011.

















 601
601

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









