






本次实验为基于stm32f103c8t6开发板,利用高级定时器的TIM1_CH1(输出比较)输出指定pwm个数(占空比为50%)。
一、实验电路图
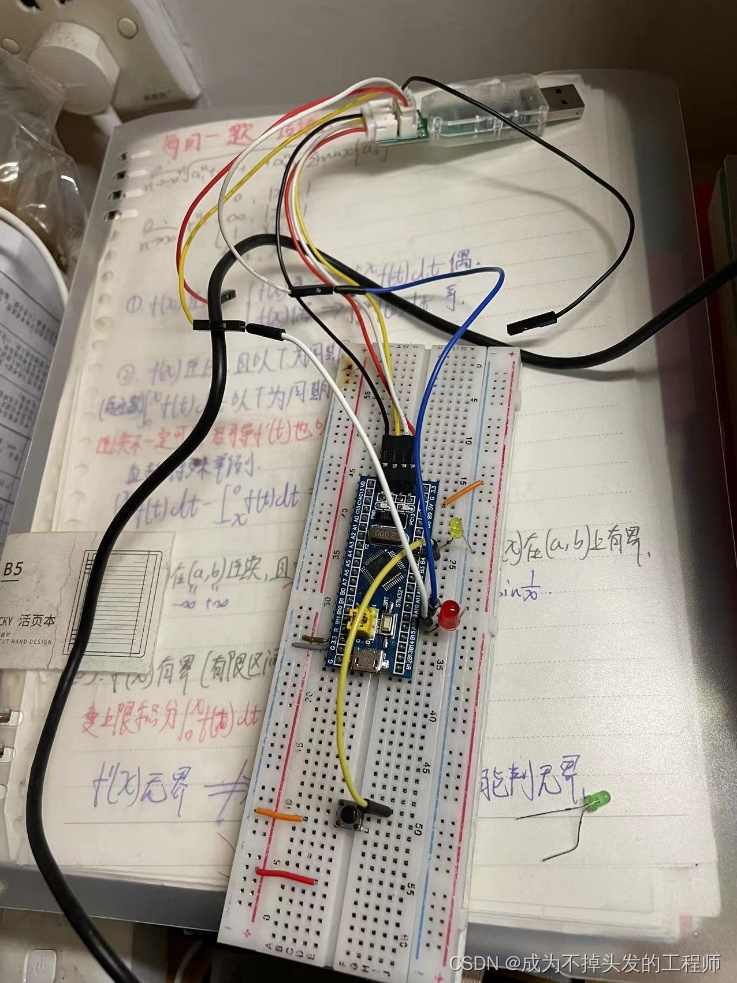
存在问题:按照指定的pwm波数量5次闪完之后,不知道为什么不会熄灭,理应最后是低电平状态输出,灯泡一直保持高电平状态。——20240124
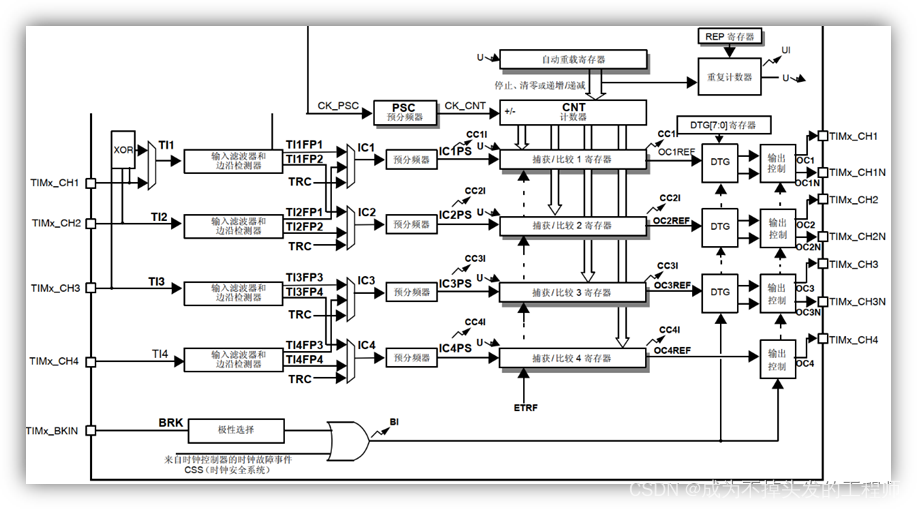
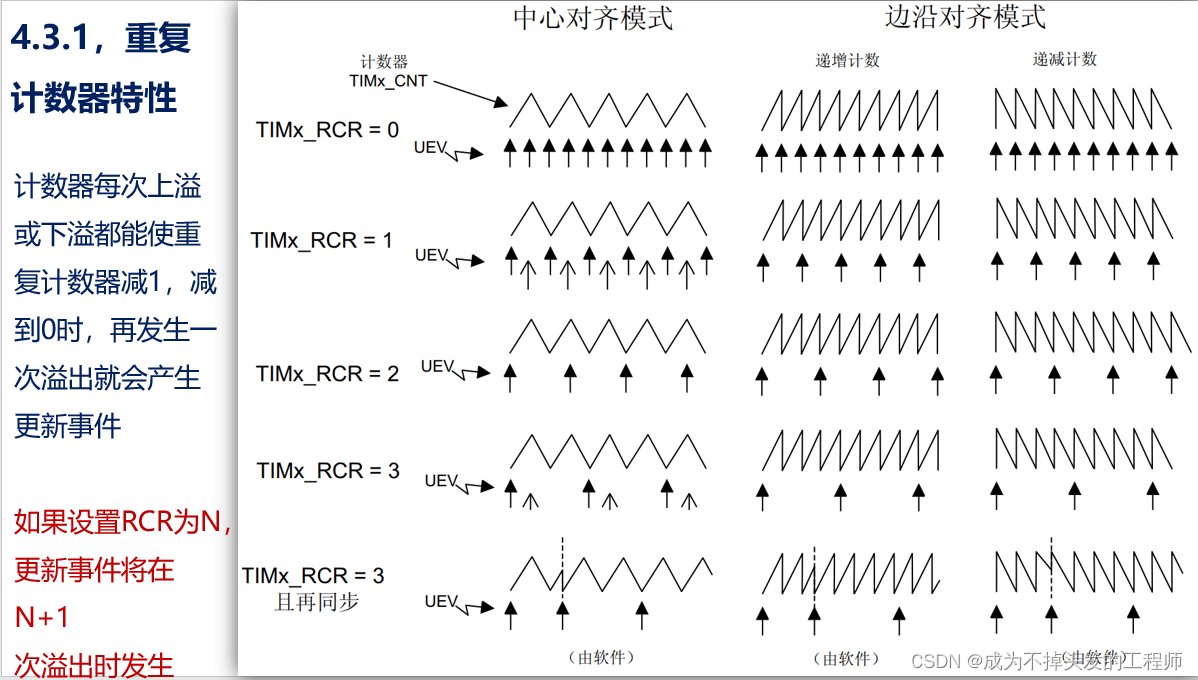
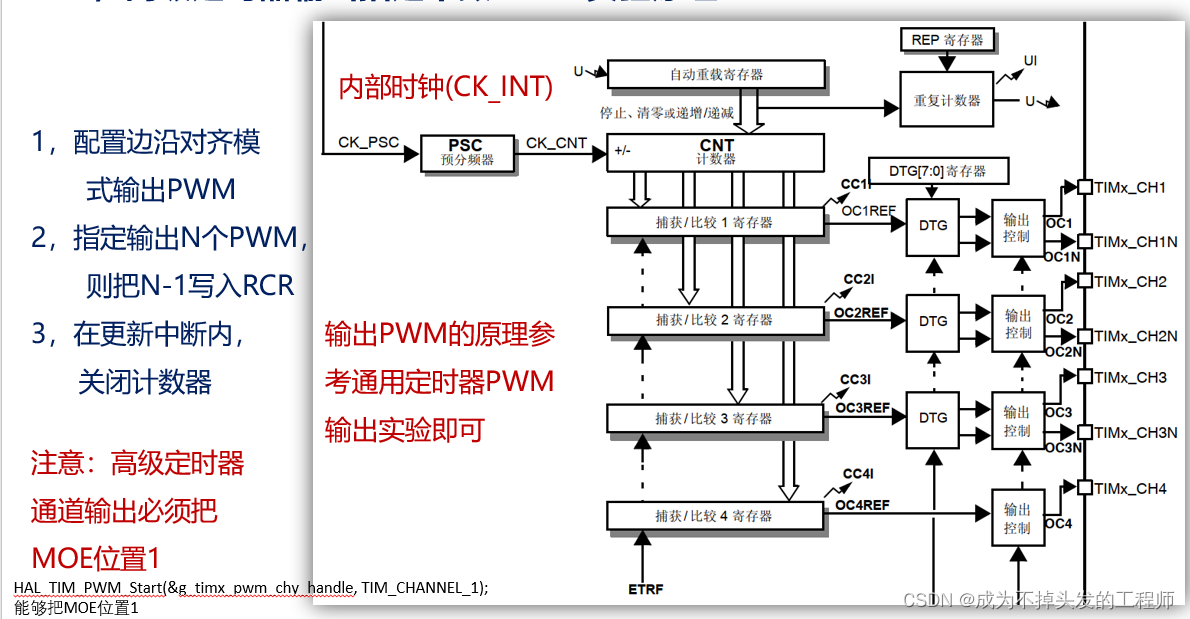
二、相关原理
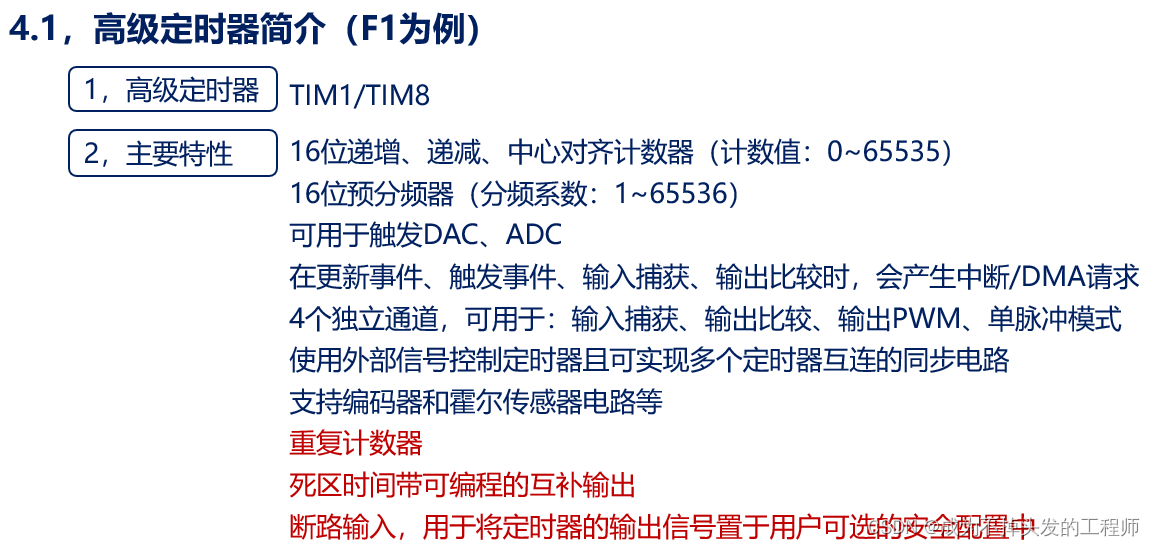
红色字体部分为高级定时器相比于其他定时器所特有的功能。
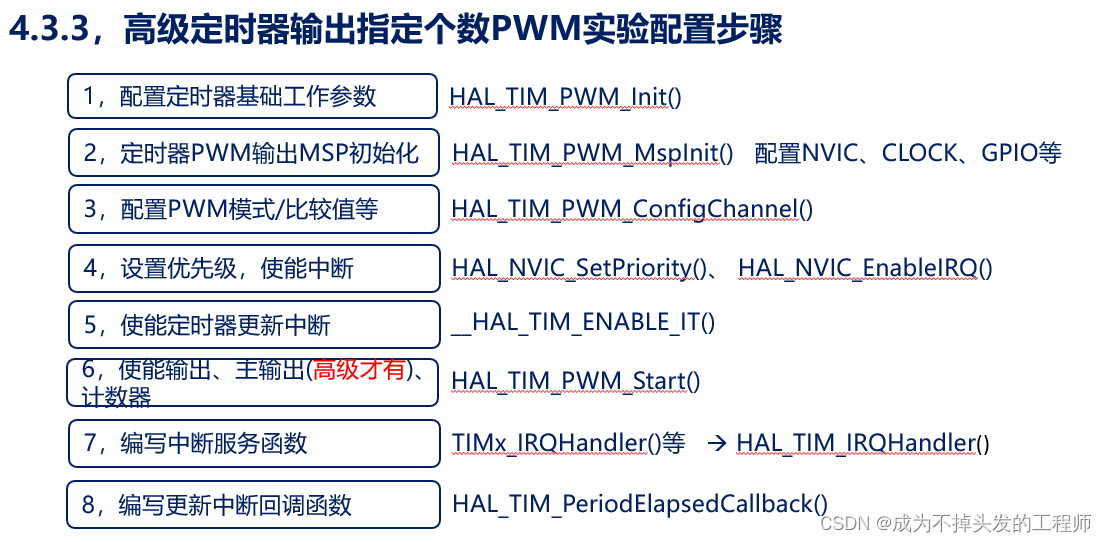
三、配置步骤
1、gtim.c文件
#include "./BSP/TIMER/gtim.h"
TIM_HandleTypeDef g_timx_pwm_chy_handle;
static uint8_t g_npwm_remain = 0;
/* 通用定时器PWM输出初始化函数 */
void gtim_timx_pwm_chy_init(uint16_t psc,uint16_t arr)
{
TIM_OC_InitTypeDef timx_oc_pwm_chy = {0};
g_timx_pwm_chy_handle.Instance = TIM1;
g_timx_pwm_chy_handle.Init.Prescaler = psc;
g_timx_pwm_chy_handle.Init.Period = arr;
g_timx_pwm_chy_handle.Init.CounterMode = TIM_COUNTERMODE_UP; /* 向上计数模式 */
g_timx_pwm_chy_handle.Init.RepetitionCounter = 0; /* 重复计数器初始值 */
HAL_TIM_PWM_Init(&g_timx_pwm_chy_handle);
timx_oc_pwm_chy.OCMode = TIM_OCMODE_PWM1; /* 模式选择PWM1 */
timx_oc_pwm_chy.Pulse = arr / 2; /* 设置比较值CCRx,此值用来确定占空比 */
/* 这里默认设置比较值为自动重装载值的一半,即占空比为50% */
timx_oc_pwm_chy.OCPolarity = TIM_OCPOLARITY_HIGH; /* 设定CCxP的值,低电平有效 */
HAL_TIM_PWM_ConfigChannel(&g_timx_pwm_chy_handle,&timx_oc_pwm_chy, TIM_CHANNEL_1); /* 配置TIM1通道1 */
__HAL_TIM_ENABLE_IT(&g_timx_pwm_chy_handle, TIM_IT_UPDATE); /* 允许更新中断 */
HAL_TIM_PWM_Start(&g_timx_pwm_chy_handle, TIM_CHANNEL_1); /* 开启对应PWM通道,其中有使能MOE位 */
}
/* 定时器输出PWM MSP初始化函数 */
/* 1、使能TIM时钟;2、使能IO时钟及引脚复用. */
void HAL_TIM_PWM_MspInit(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM1)
{
GPIO_InitTypeDef g_init_struct;
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_TIM1_CLK_ENABLE();
g_init_struct.Pin = GPIO_PIN_8;
g_init_struct.Mode = GPIO_MODE_AF_PP; /* 复用推挽输出功能 */
g_init_struct.Pull = GPIO_PULLUP; /* 上拉 */
g_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; /* 高速 */
HAL_GPIO_Init(GPIOA, &g_init_struct);
HAL_NVIC_SetPriority(TIM1_UP_IRQn, 1, 3);
HAL_NVIC_EnableIRQ(TIM1_UP_IRQn);
}
}
/* 高级定时器TIMX NPWM设置的PWM个数函数 */
void atim_timx_npwm_chy_set(uint8_t npwm)
{
if(npwm == 0) return;
else{
g_npwm_remain = npwm;
HAL_TIM_GenerateEvent(&g_timx_pwm_chy_handle, TIM_EVENTSOURCE_UPDATE); /* 产生软件更新事件 */
__HAL_TIM_ENABLE(&g_timx_pwm_chy_handle); /* 启动计数器 */
}
}
void TIM1_UP_IRQHandler(void)
{
HAL_TIM_IRQHandler(&g_timx_pwm_chy_handle);
}
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM1)
{
if(g_npwm_remain)
{
TIM1->RCR = g_npwm_remain - 1;
HAL_TIM_GenerateEvent(&g_timx_pwm_chy_handle, TIM_EVENTSOURCE_UPDATE);
__HAL_TIM_ENABLE(&g_timx_pwm_chy_handle);
g_npwm_remain = 0;
}
else
{
TIM1->CR1 &= ~(1 << 0); /* 禁用计数器 */
}
}
}
2、main.c文件
#include "./SYSTEM/sys/sys.h"
#include "./SYSTEM/usart/usart.h"
#include "./SYSTEM/delay/delay.h"
#include "./BSP/LED/led.h"
#include "./BSP/KEY/key.h"
#include "./BSP/TIMER/gtim.h"
extern TIM_HandleTypeDef g_timx_pwm_chy_handle;
int main(void)
{
uint8_t t = 0;
HAL_Init(); /* 初始化HAL库 */
sys_stm32_clock_init(RCC_PLL_MUL9); /* 设置时钟, 72Mhz */
delay_init(72); /* 延时初始化 */
led_init();
key_init();
usart_init(115200); /* 初始化串口 */
gtim_timx_pwm_chy_init(7200 - 1, 5000 - 1);
atim_timx_npwm_chy_set(3);
while(1)
{
delay_ms(10);
t++;
if(key_scan())
{
atim_timx_npwm_chy_set(5);
}
if(t > 20)
{
t = 0;
LED1_TOGGLE();
}
}
}
四、注意事项
- stm32f103系列仅有TIM1一个定时器,并且需要对TIM1对应引脚进行复用。
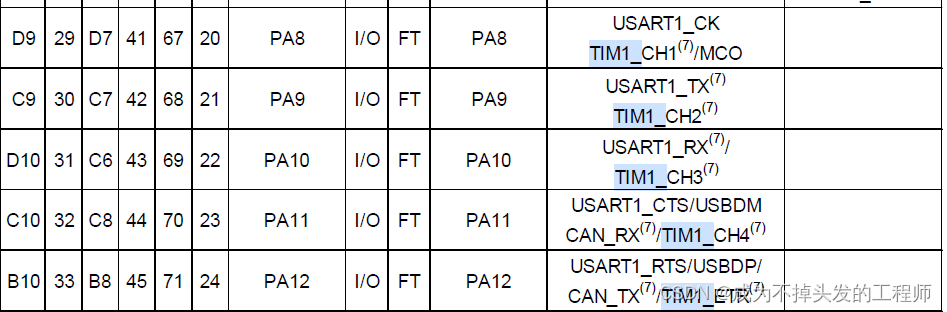
五、复用与重映射的区别
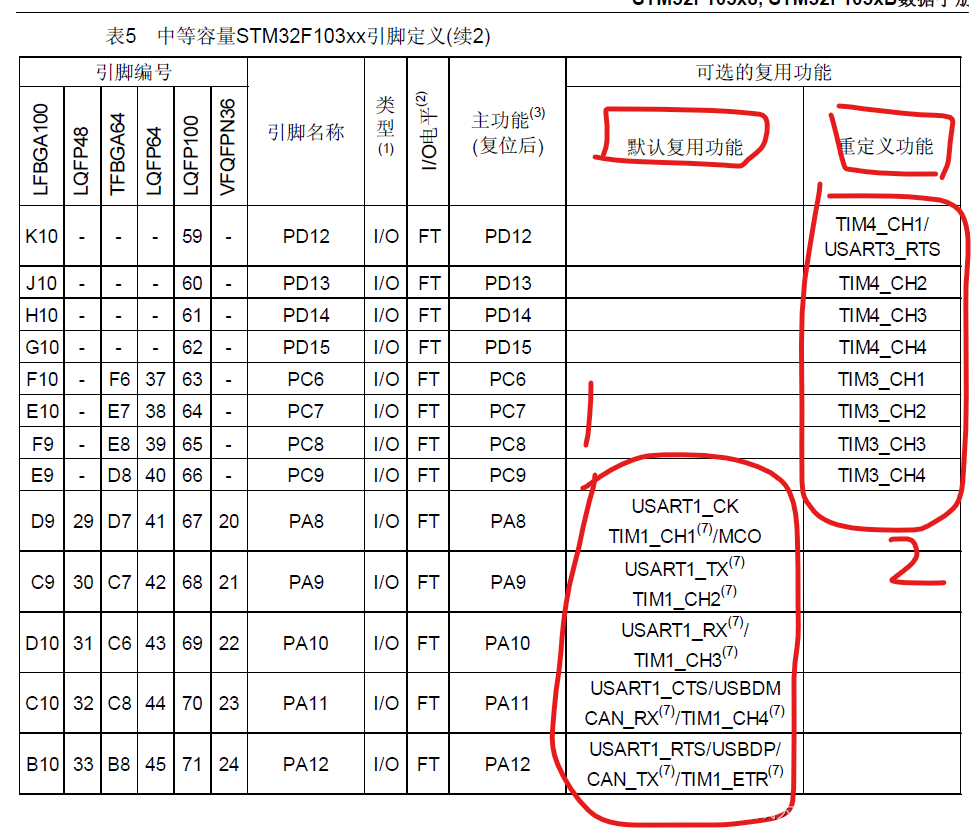
复用与重映射本质上应该都是叫IO引脚的复用功能(AFIO),操作的寄存器不一样,以hal库为例,默认复用功能,也即①中的复用功能,可通过gpio_init_struct.Mode = GPIO_MODE_AF_PP;进行定义为“复用推挽输出“。
![]()
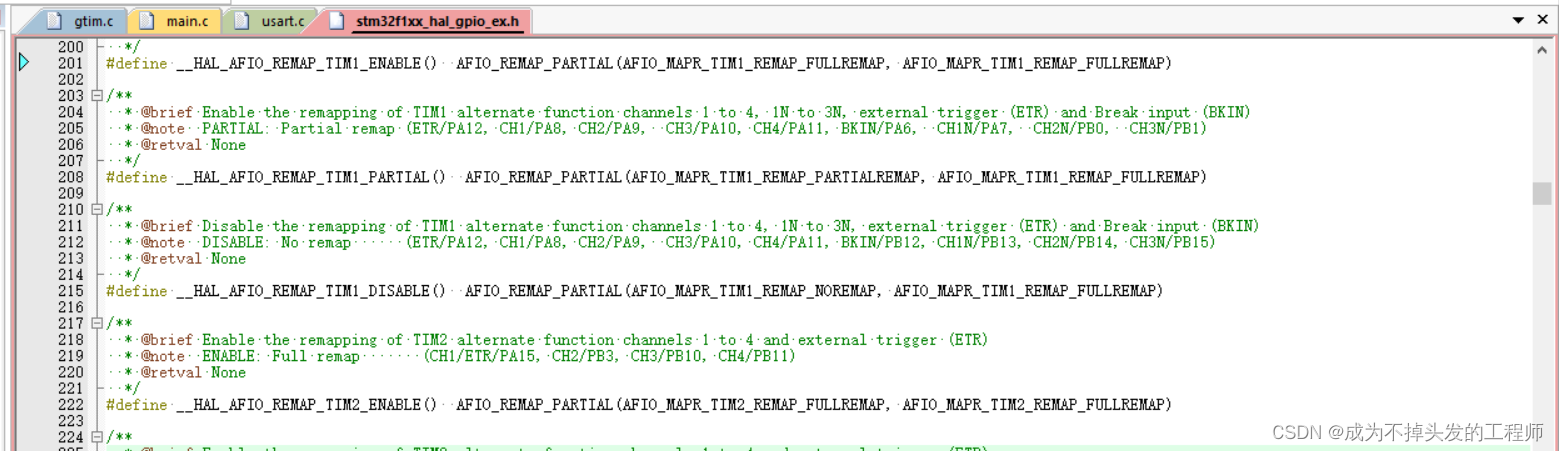
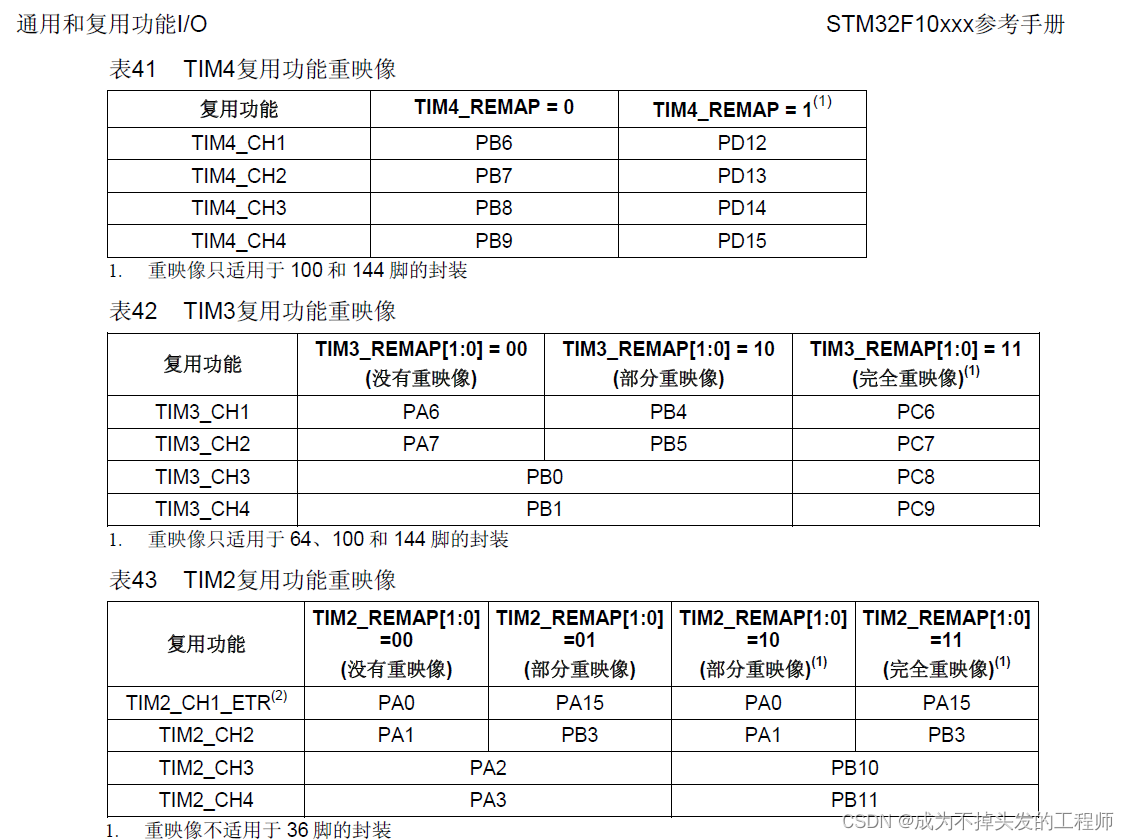
而②中的重映射需要通过下列函数进行相关操作(以TIMx为例),参考STM32F10XXX中文数据手册。
六、认识与了解
1、定时器输出PWM MSP初始化函数void HAL_TIM_PWM_MspInit(TIM_HandleTypeDef *htim)
以及
终端回调函数void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
并非必须定义的,MSP初始化函数可以直接在Init函数里面直接编写初始化,回调函数的内容可以直接在中断函数中void TIM1_UP_IRQHandler(void)编辑使用。
2、面包板最底下那一块也是分两边使用的,必须引地线过去才能使用。


















 1178
1178

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











