










本文讲解一下如何在windows环境下配置ORB_SLAM2并且运行,希望能够帮助到大家,制作不易,希望大家能够点个赞,给个关注!
在讲本篇文章,首先大家一定要关闭掉所有杀毒软件,windows自带的也要关闭
如下:

首先,先把整个工程以及要用到的安装包附上大家自行下载:
整个工程以及要用到的安装包链接如下:
链接:https://pan.baidu.com/s/195EHUwiEAO7sU3_Tvdrmig
提取码:ctky
VS2017安装包如下:
链接:https://pan.baidu.com/s/1o9XESFGGqJOHror7bwd6dw
提取码:jec8
一、vs2017安装教程
1.安装VS2017,在将我给大家准备好的压缩包下载过后应该是这个软件

下面我们双击打开它,出现如下界面:
我们等待它安装完成,安装完成后出现界面:
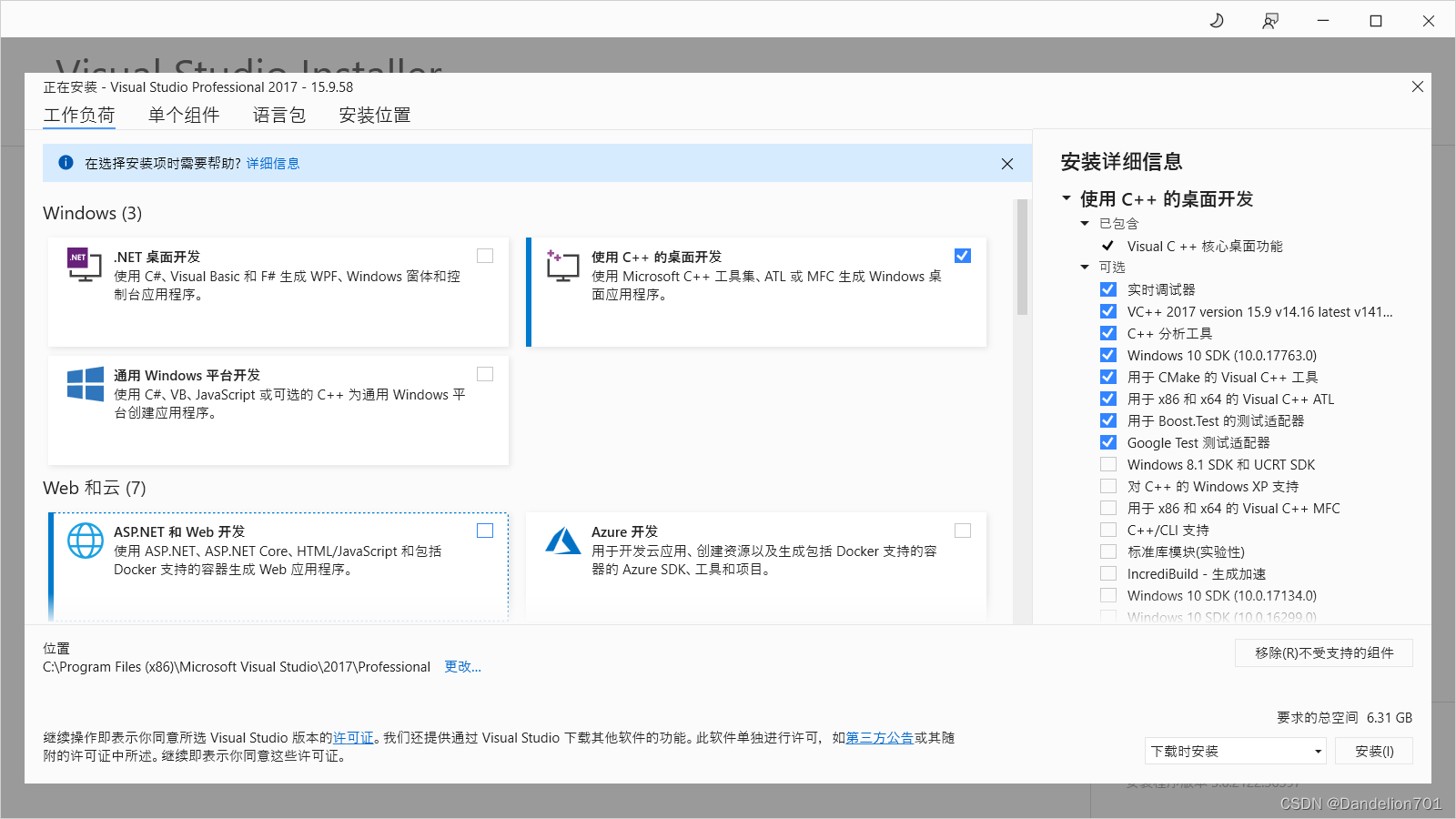
点击这里,更改VS2017的位置,C盘内存小的同学,最好不要安装在C盘: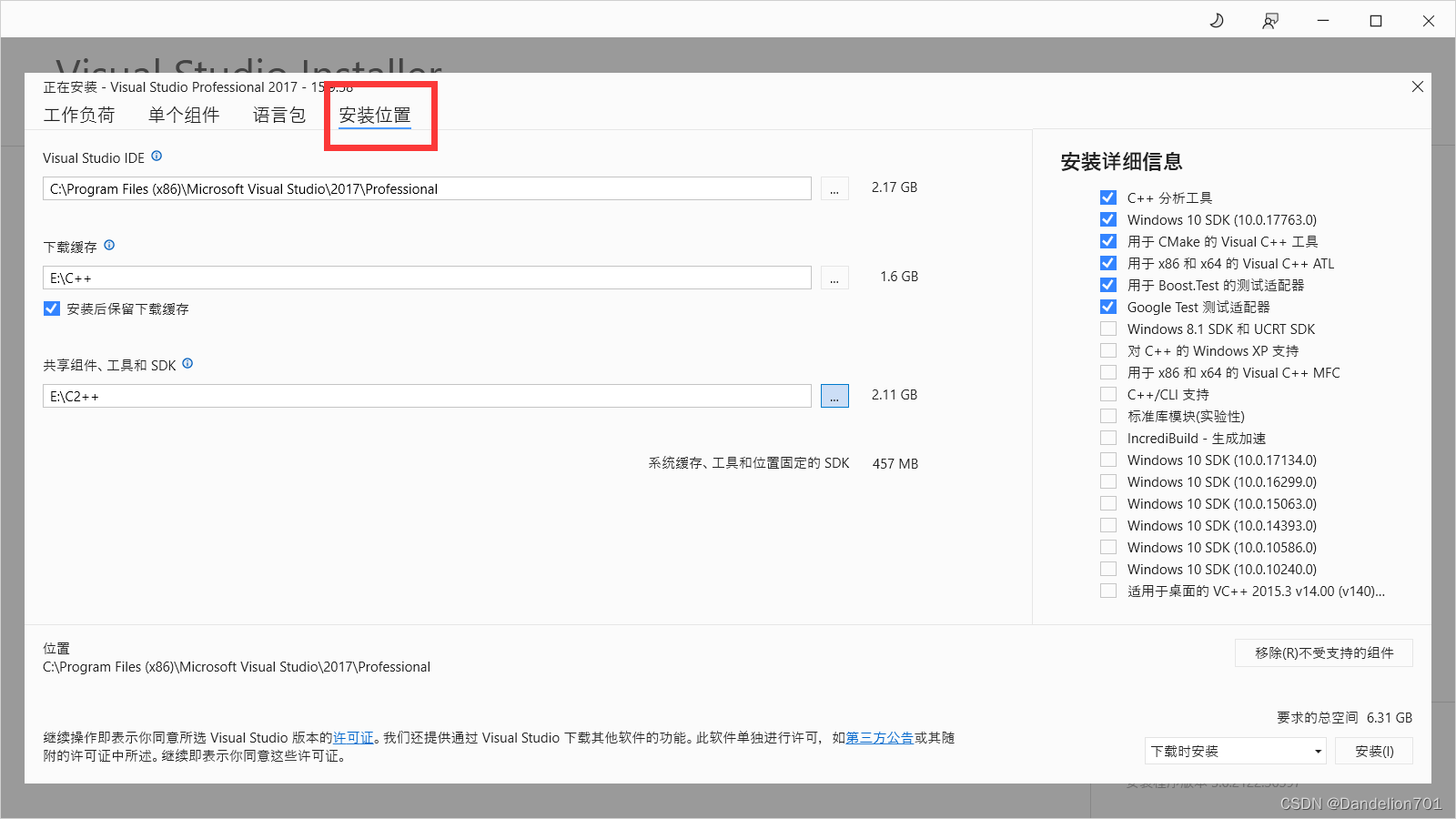 勾选好这些选项过后,点击安装,等待安装完成
勾选好这些选项过后,点击安装,等待安装完成
此时VS2017已经安装完成
软件启动过后,我们选择Visual C++,然后启动Visual Studio
启动过后来到这个界面:
然后我们退出软件,至此,VS2017软件安装完成。
二、Cmake软件的安装
下载工程压缩包,下载过后进行解压,来到这个文件夹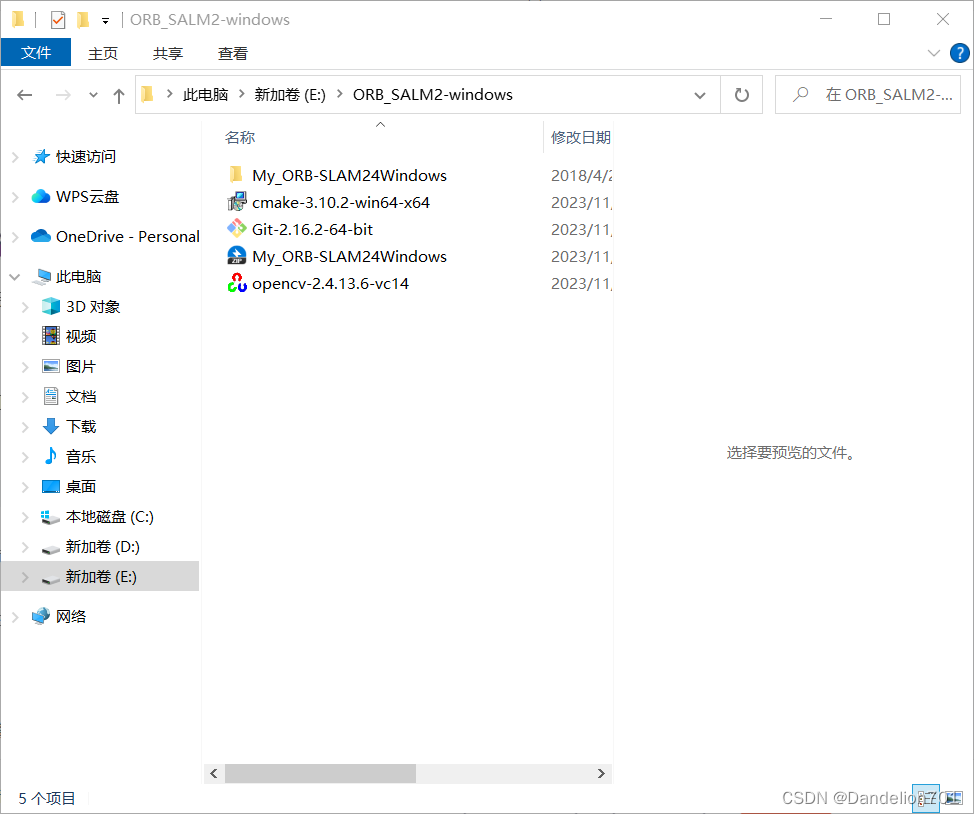 直接双击cmake打开它,点击next,一直到这一步:
直接双击cmake打开它,点击next,一直到这一步:
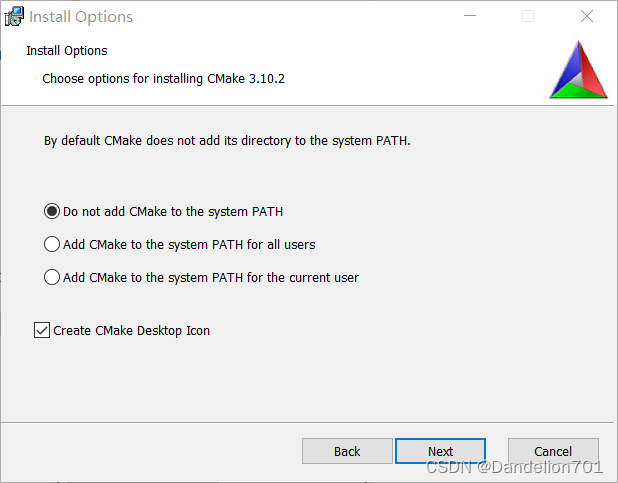
选择自己的安装路径,不要安装在C盘,然后点击next,直接进行安装。
现在已经安装完成,能够看到桌面也有cmake软件的快捷方式,
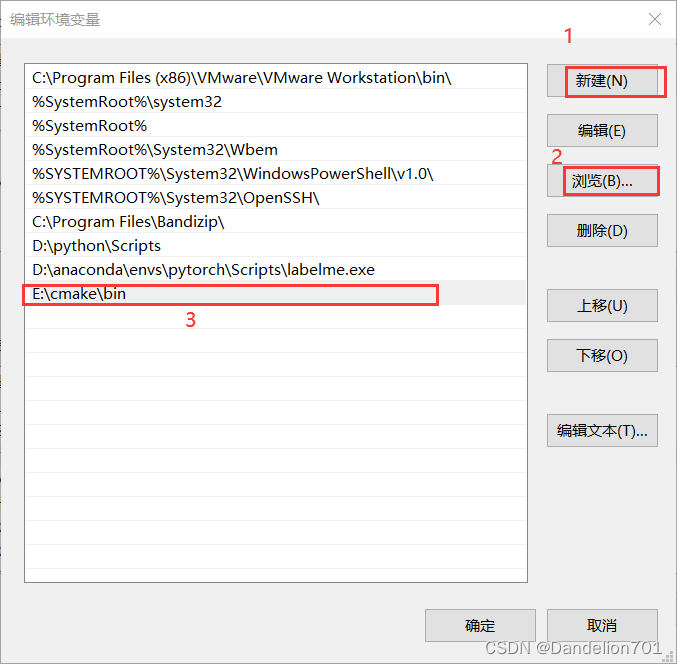
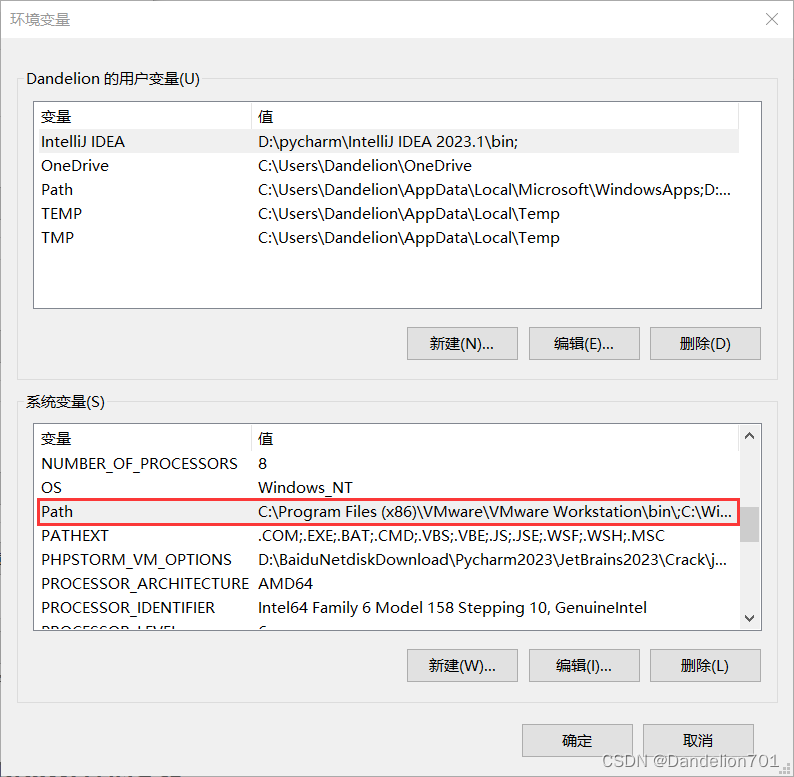
然后我们配置cmake的环境变量,点击环境变量,
找到系统变量的Path,进行编辑,
点击新建,点击浏览,然后找到cmake里面的bin文件夹,把它添加进去
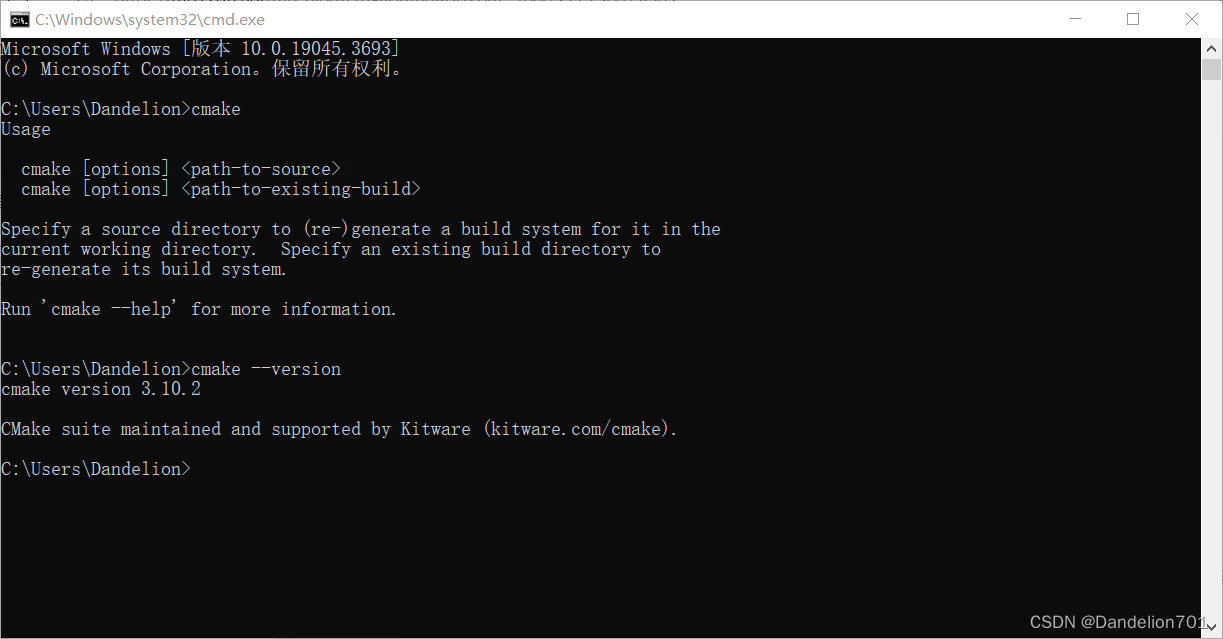
然后使用windows+R,进入命令终端,输入cmd,再输入cmake和cmake --version,出现以下画面代表你的cmake已经安装成功了。
至此,cmake软件安装完成。
三、Git软件安装
双击打开压缩包里面的Git,同样,还是不要安装在C盘里面,

然后一路next就行,直到安装完成,
至此,Git软件我们已经安装完成了。
四、关于配置ORB_SLAM2的第三方库的安装
1.OpenCV库的配置
我们双击打开压缩包里面的opecv进行安装
自己创建一个OpenCV文件夹,把opencv安装进去
安装完OpenCV后,还需要配置环境变量,同样在Path路径下添加以下三个路径;
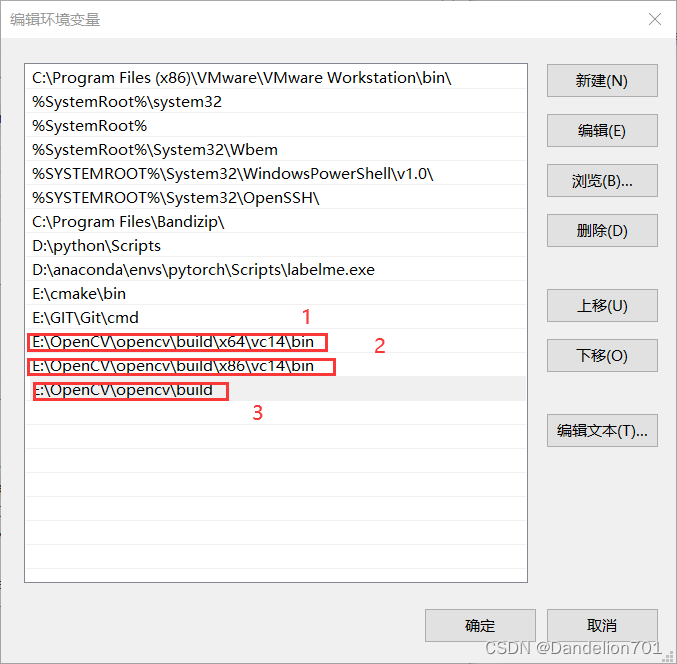
至此,Opencv的安装就算完成了。
2.DBoW2库的配置
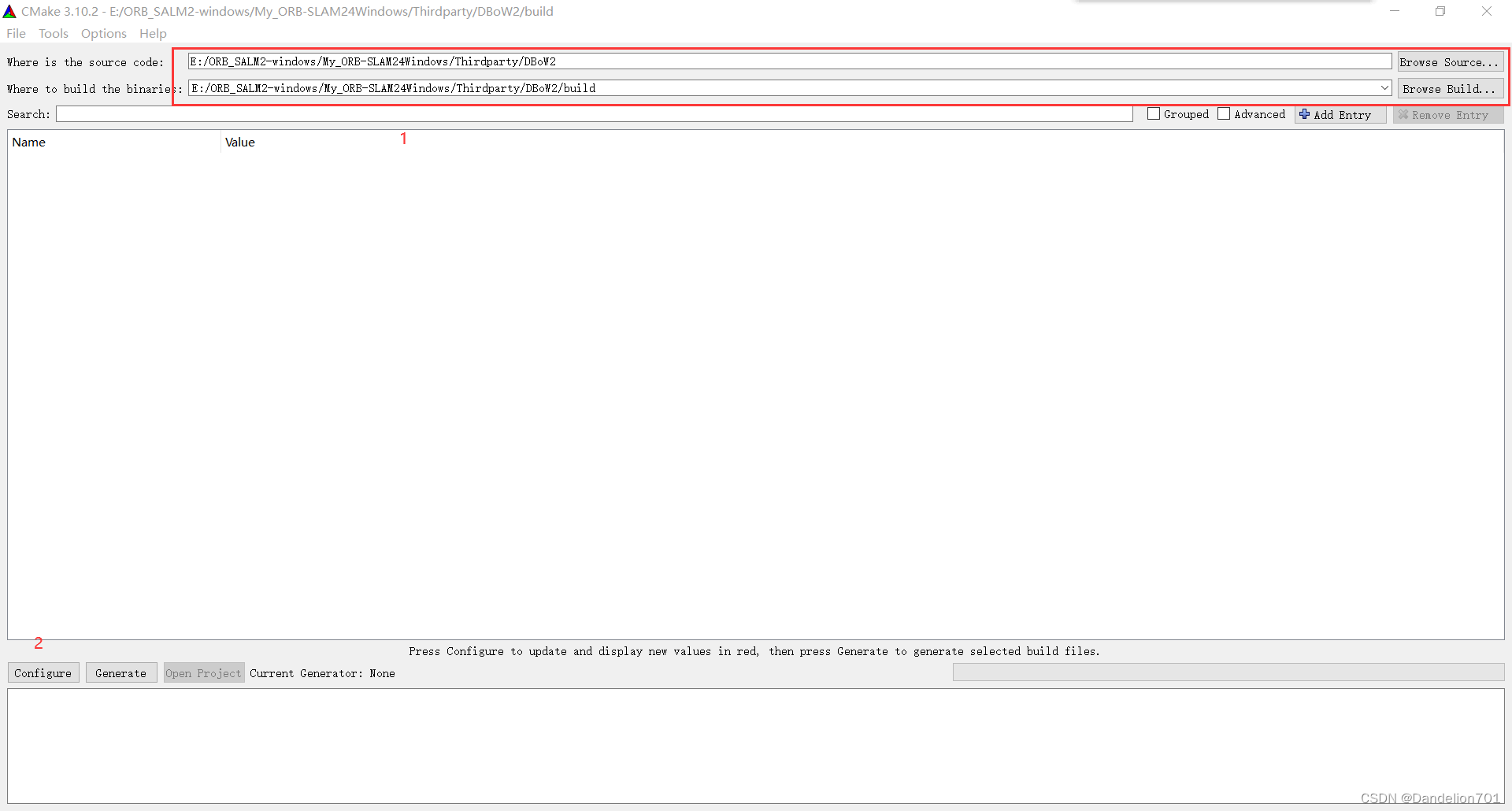
以管理员身份运行cmake软件,在E:/ORB_SALM2-windows/My_ORB-SLAM24Windows/Thirdparty/DBoW2(根据自己的目录来)目录下创建一个build文件夹,操作如下,配置好Browse后,点击config;
点击configure后出现以下界面,这里选择VS17 WIN64,然后点击Finish

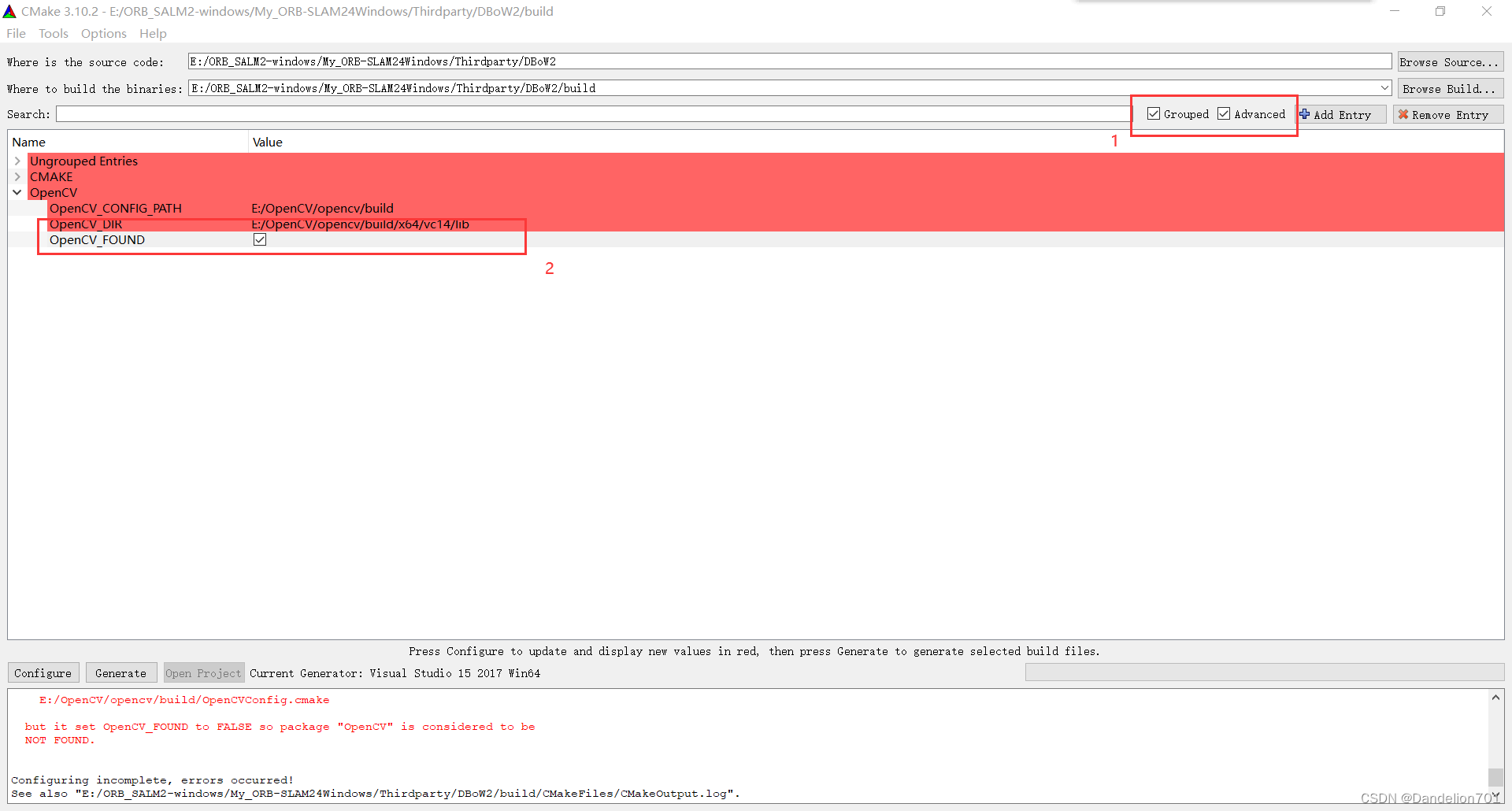
然后就会报以下错误:
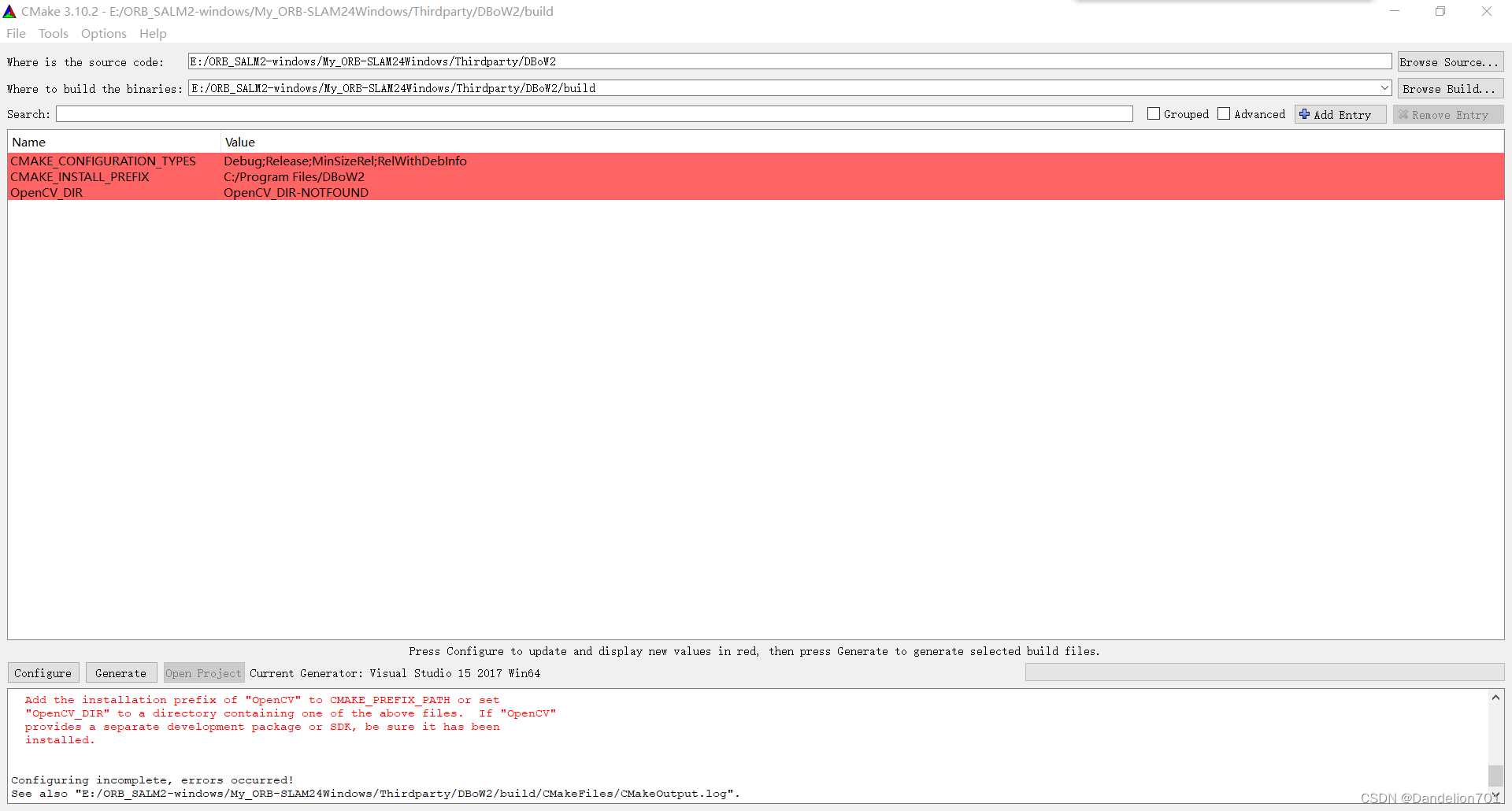
这个错误是因为没有找到OpenCV的lib库,我们勾选Grouped和Advanced选项;并点击OpenCV一栏,选择lib目录(此处目录根据自己安装的OpenCV路径而定),并将OpenCV_FOUND 后面的框打上勾,如下;(这里要是没有出现OpenCV文件夹的同学,把cmake卸载了重装,如果还没效果,就看我的另外一篇博客在windows下运行ORB-SLAM2时用cmake编译DBow2不出现OpenCV选项-CSDN博客)
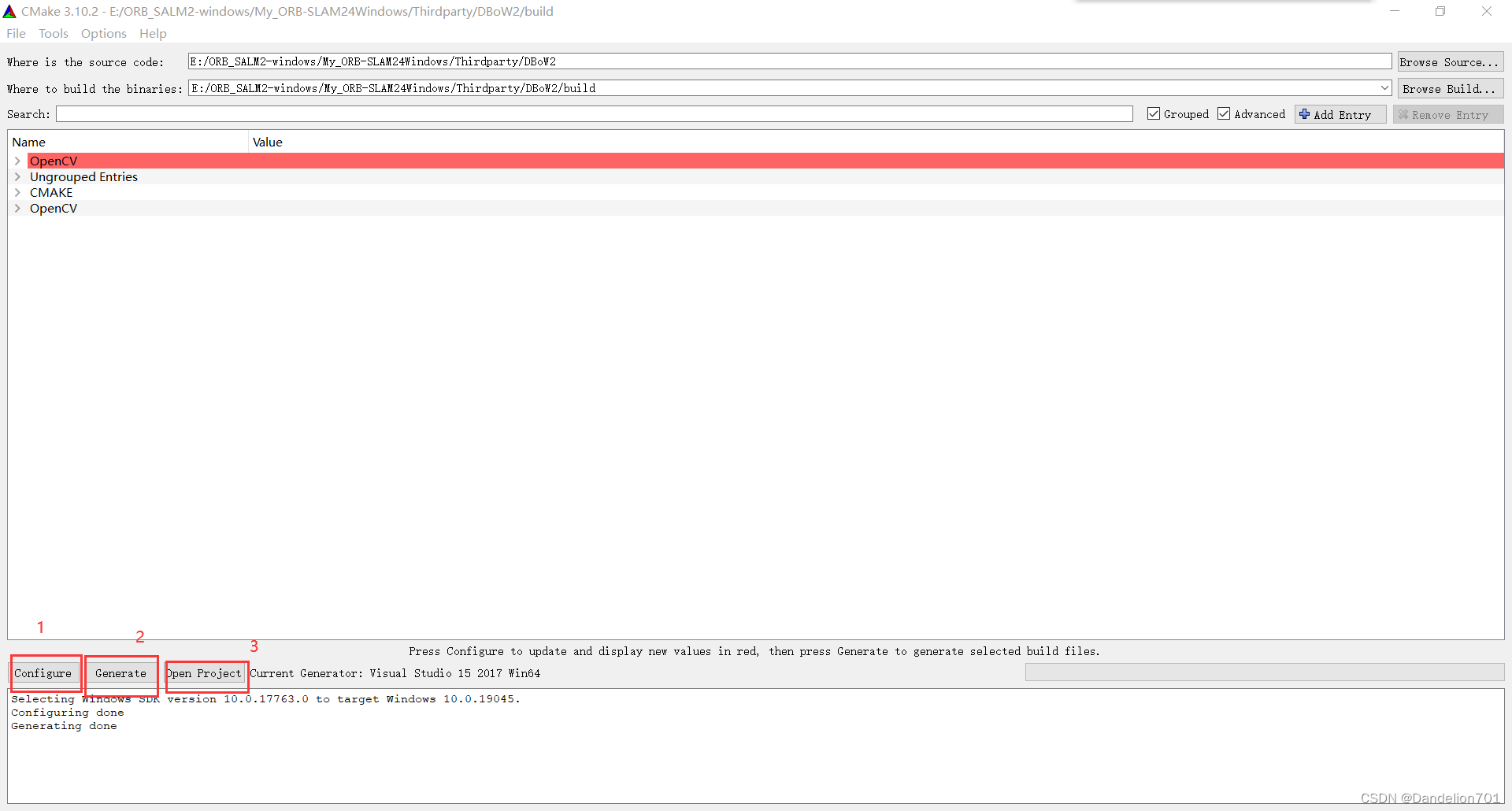
然后再依次点击configure,generate, open project;
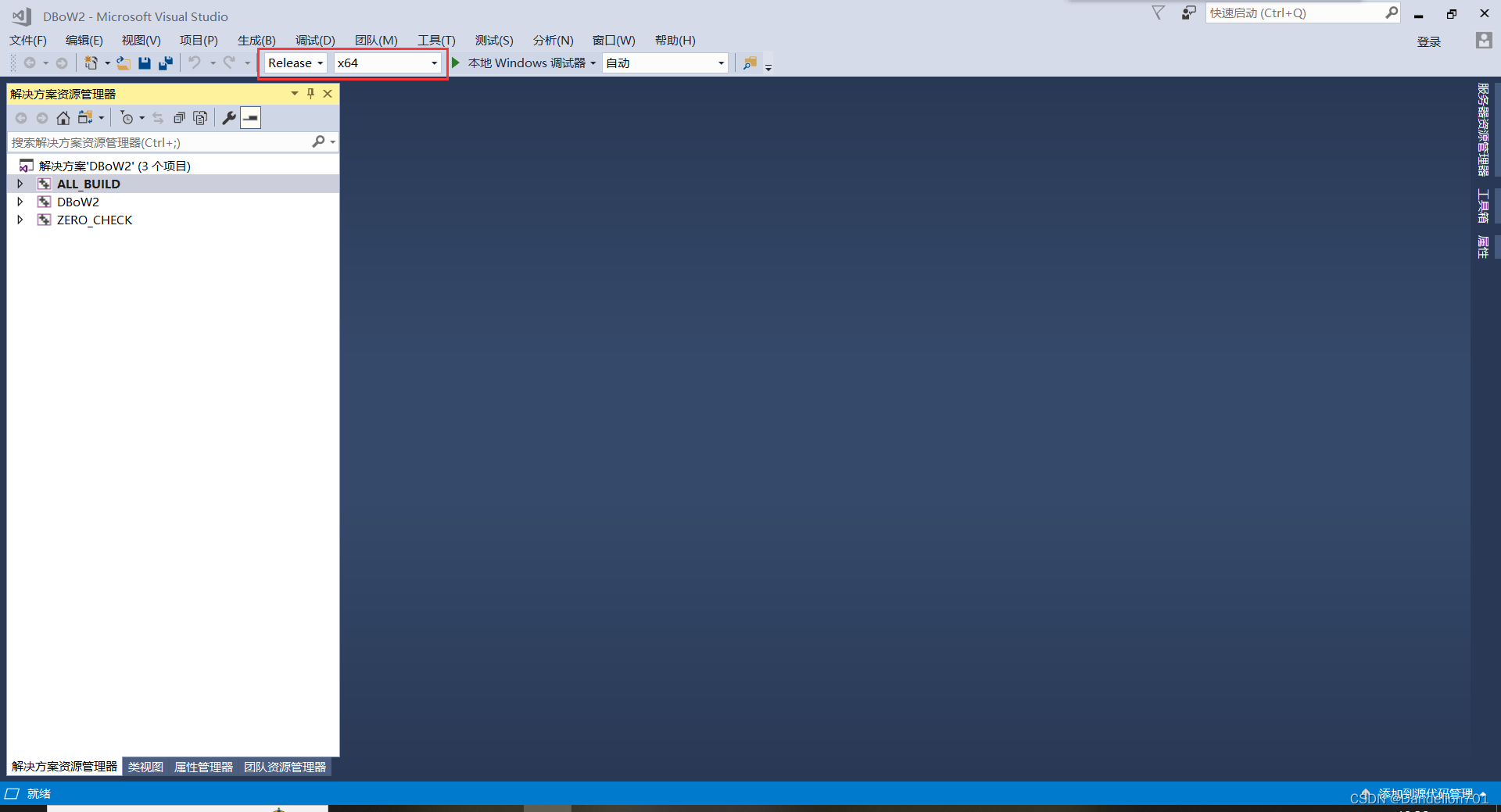
然后进入整个工程,来到VS2017界面,这里配置好Release,X64;
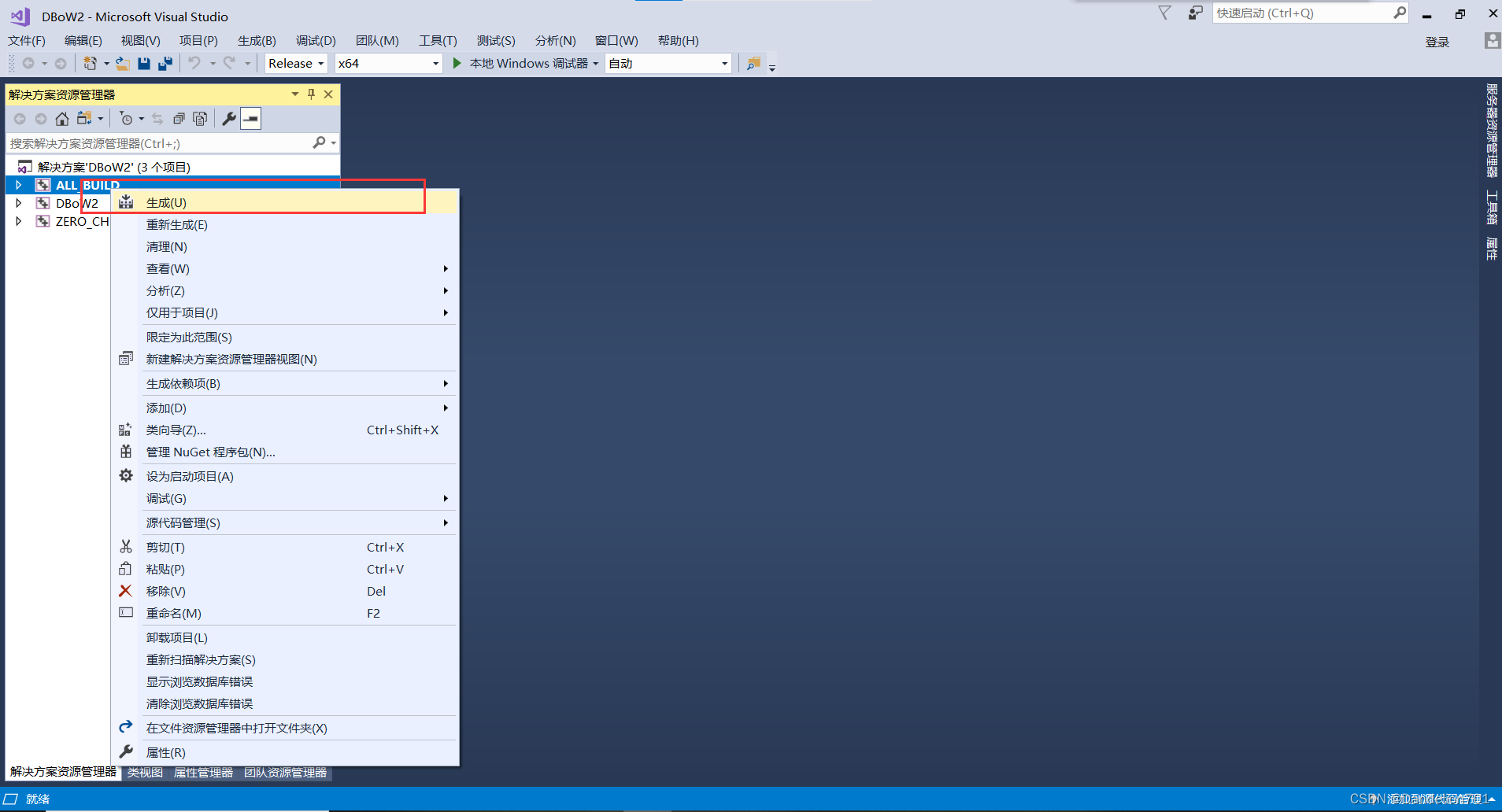
然后右键ALL_BUILD,点击生成 ;
显示成功3个;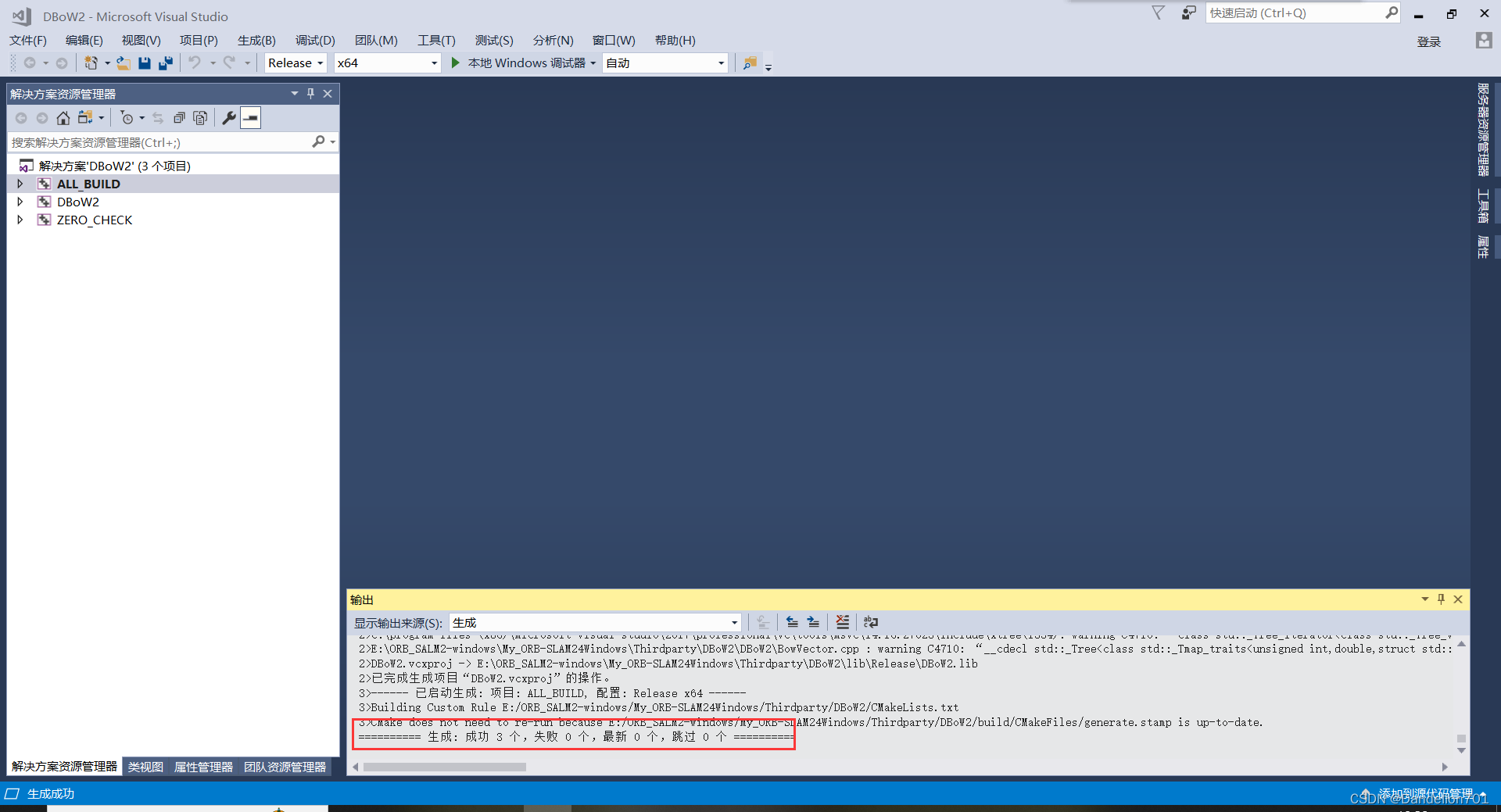
此时,在E:\ORB_SALM2-windows\My_ORB-SLAM24Windows\Thirdparty\DBoW2\lib\Release路径下,能够看到如下的DBoW2.lib文件,代表已经生成完成;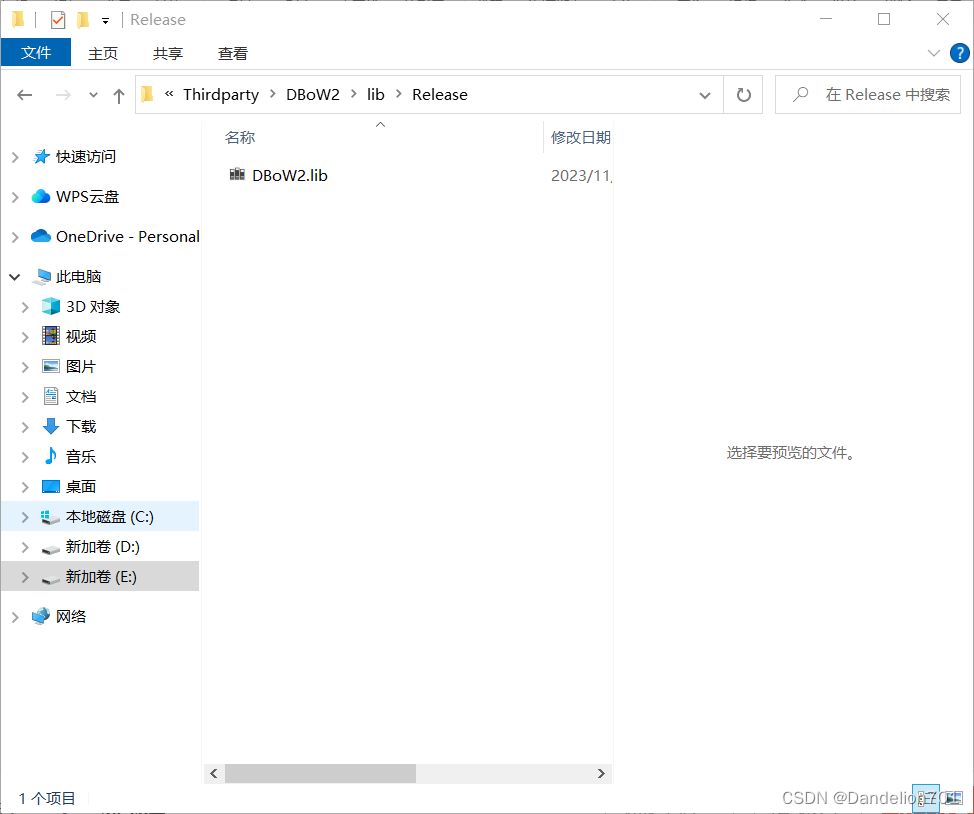
至此,DBoW2库的配置完成。
3.g2o库的配置
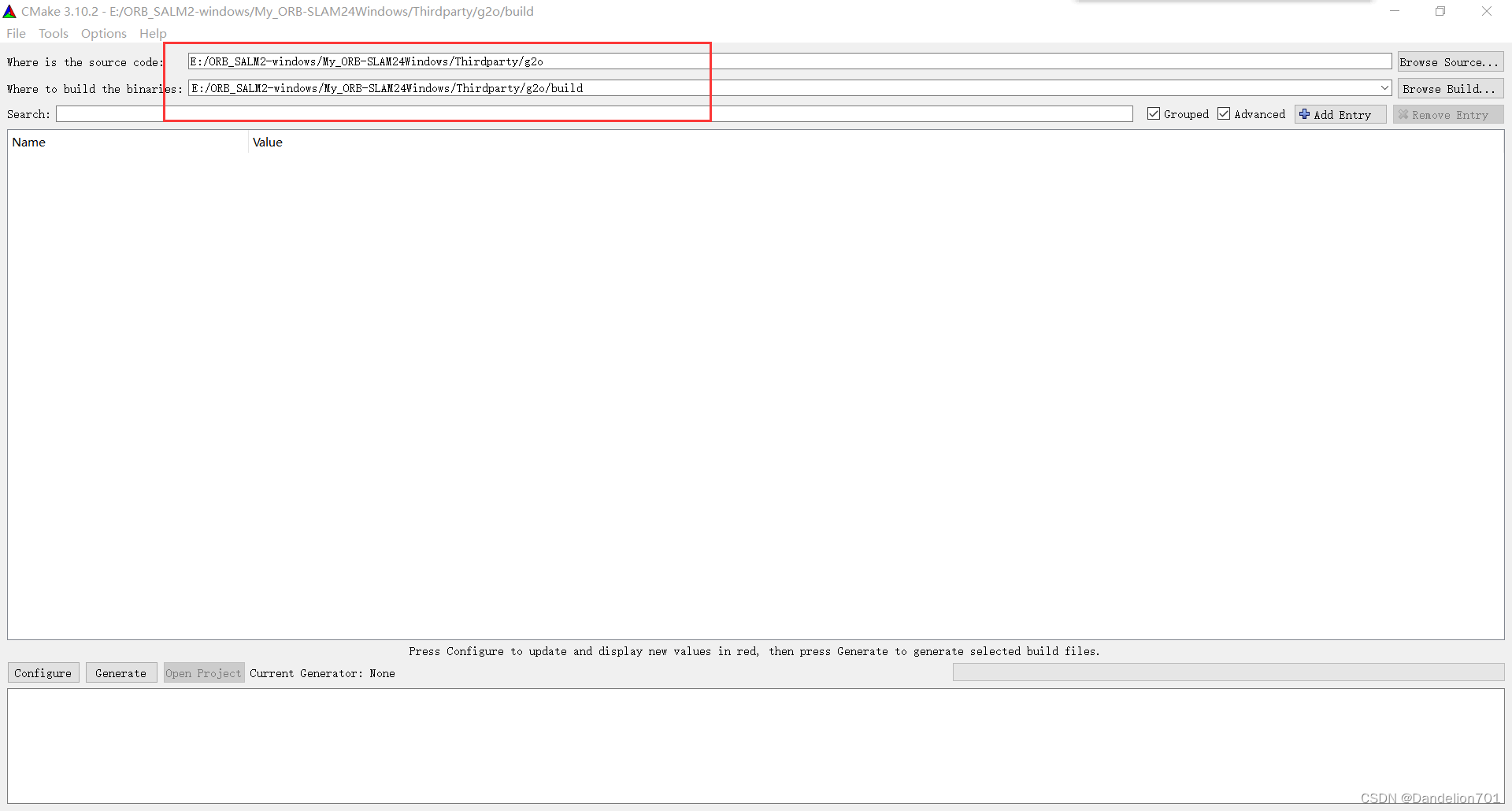
以管理员身份运行cmake软件,在g2o文件夹下创建build文件夹;
然后点击configure,配置都与DBoW2的配置一样,此时会有一些警告,我们不用管,出现Configuring done就行了;
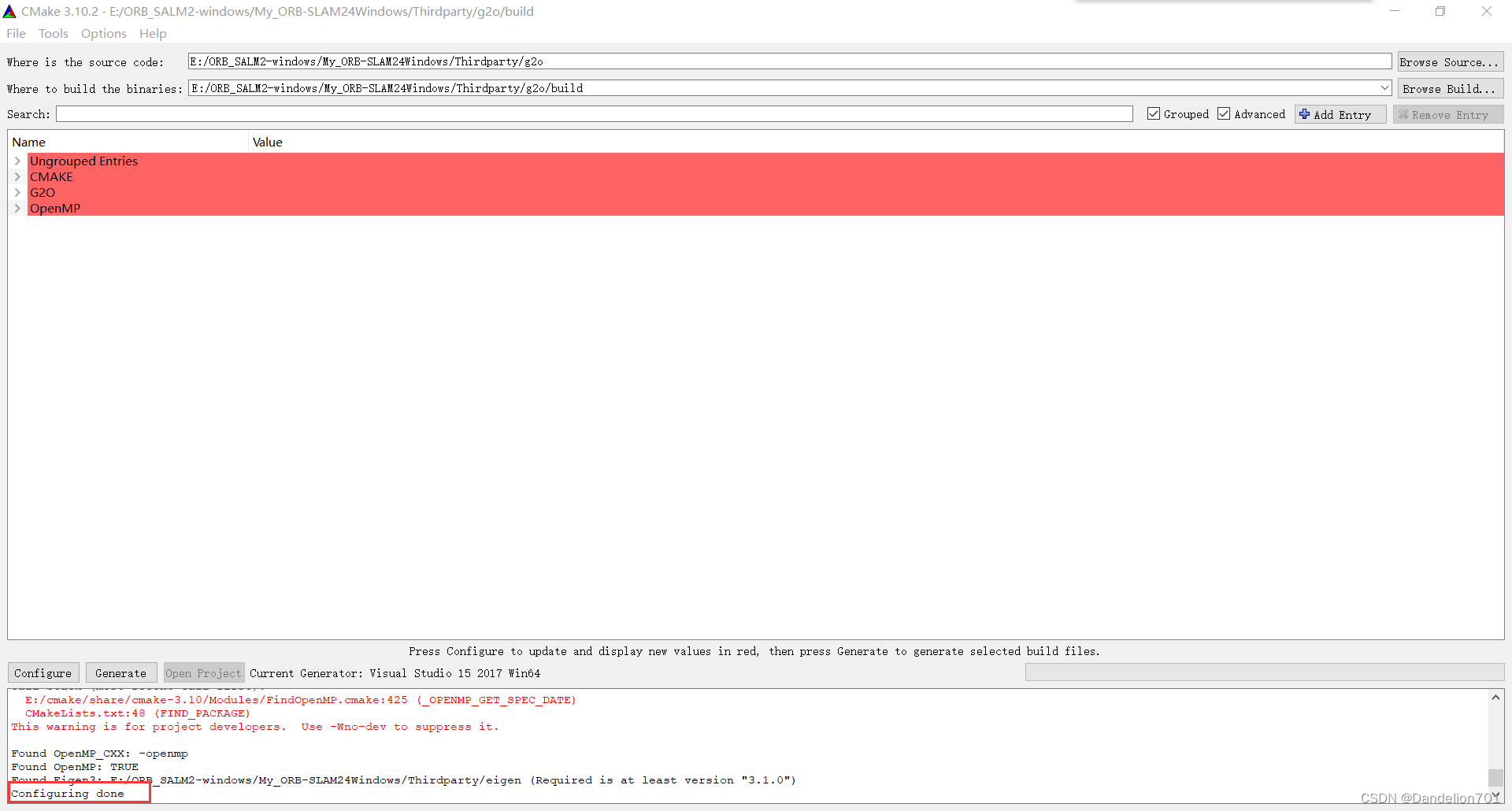
然后点击Generate,点击Open Project打开工程;
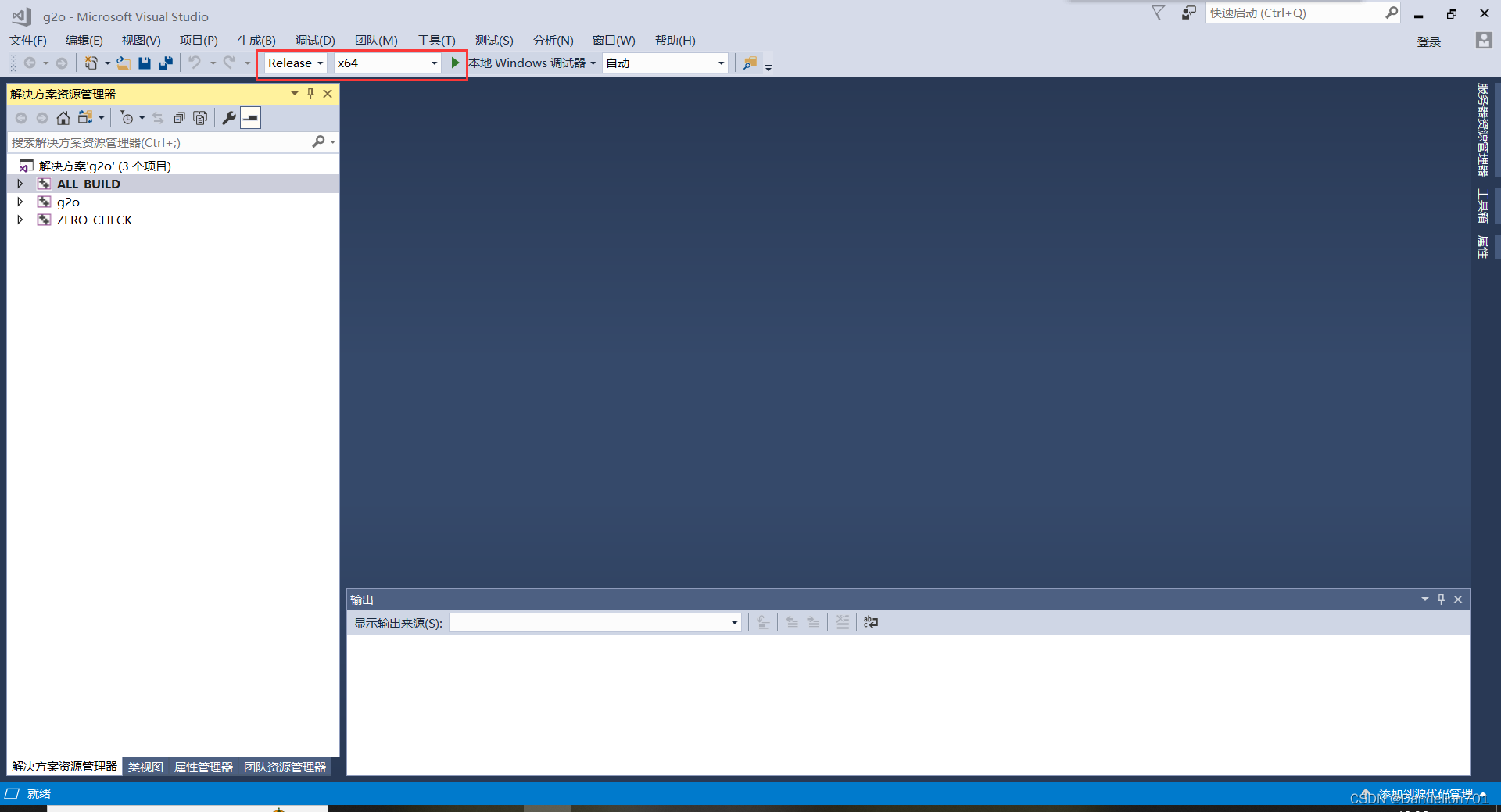
同样为Release和x64模式,我们右键g2o项目,点击属性;
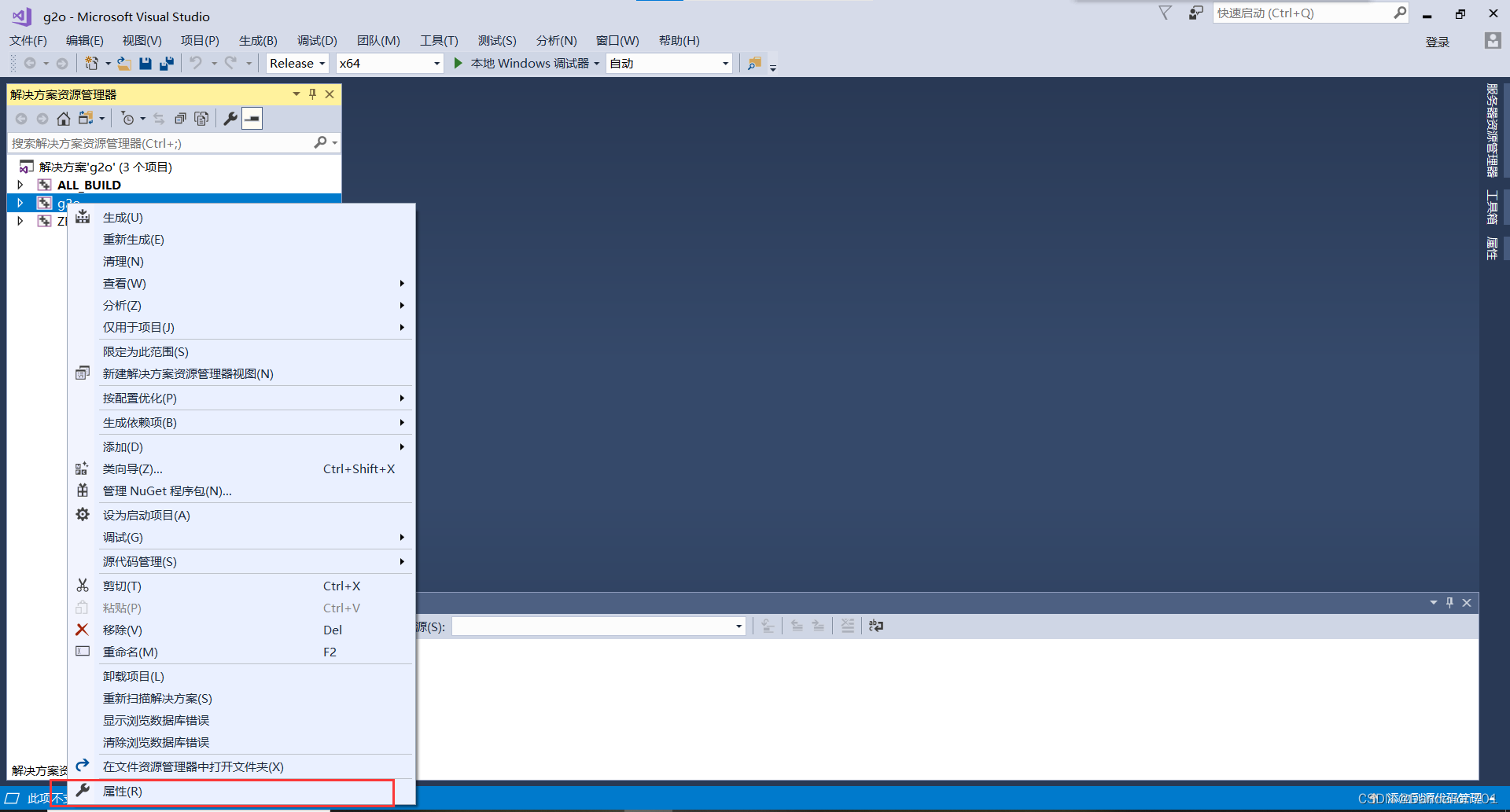
保证配置是Release和x64模式,然后按照如下操作,在预处理器一栏增加WINDOWS;
然后右键ALL_BUILD,点击生成;
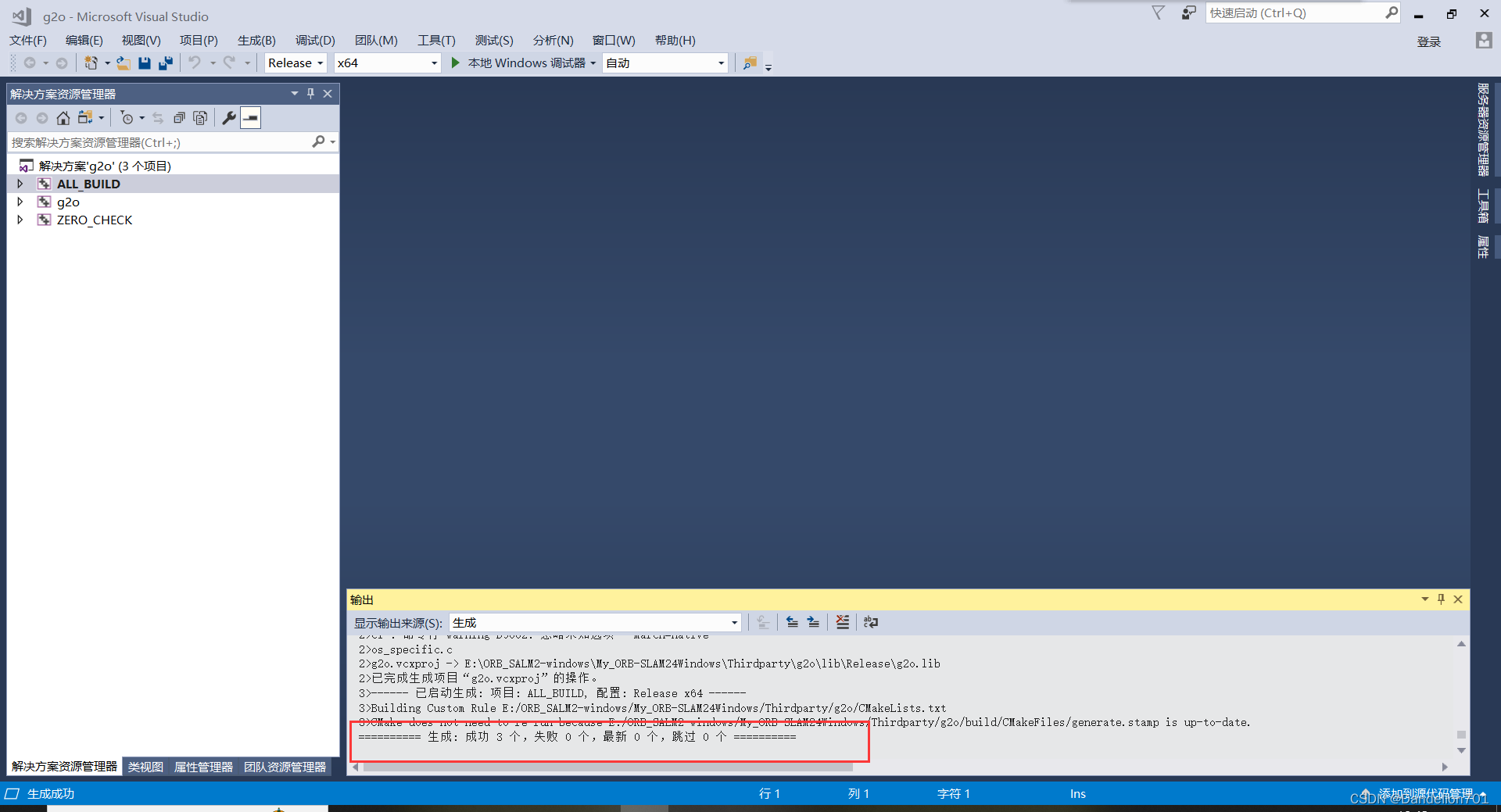 显示成功3个,再看看文件路径E:\ORB_SALM2-windows\My_ORB-SLAM24Windows\Thirdparty\g2o\lib\Release下,生成了g2o.lib文件,代表g2o库已经配置完成;
显示成功3个,再看看文件路径E:\ORB_SALM2-windows\My_ORB-SLAM24Windows\Thirdparty\g2o\lib\Release下,生成了g2o.lib文件,代表g2o库已经配置完成;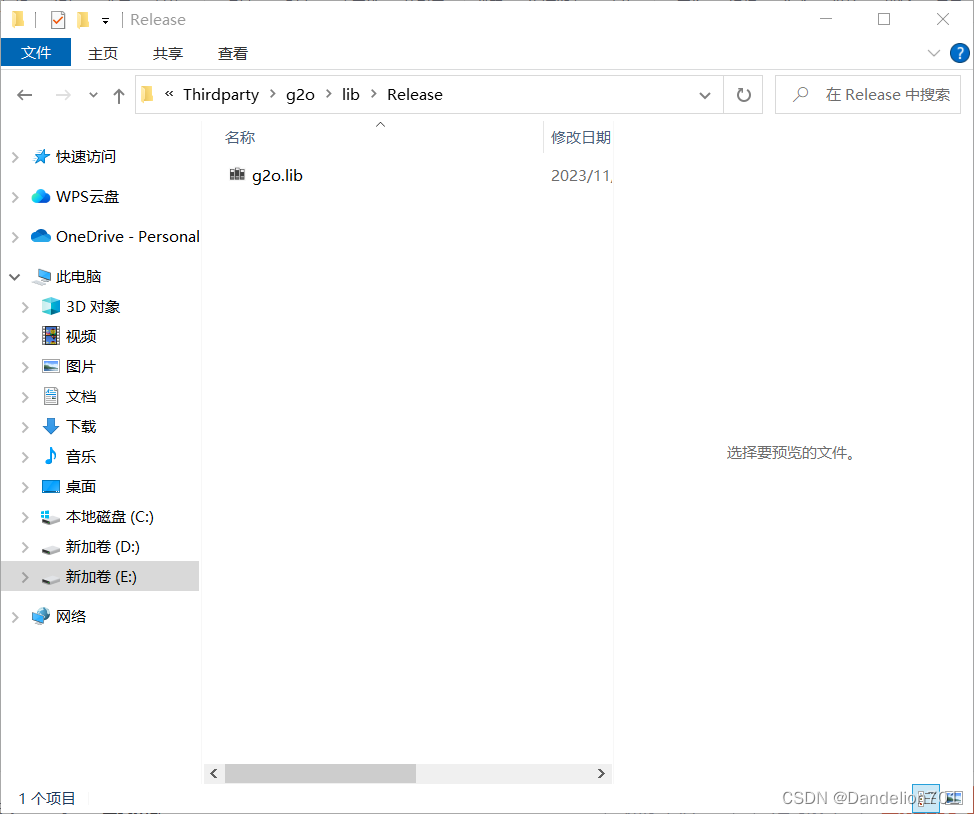 至此,g2o库已经配置完成了。
至此,g2o库已经配置完成了。
4.Pangolin库的配置
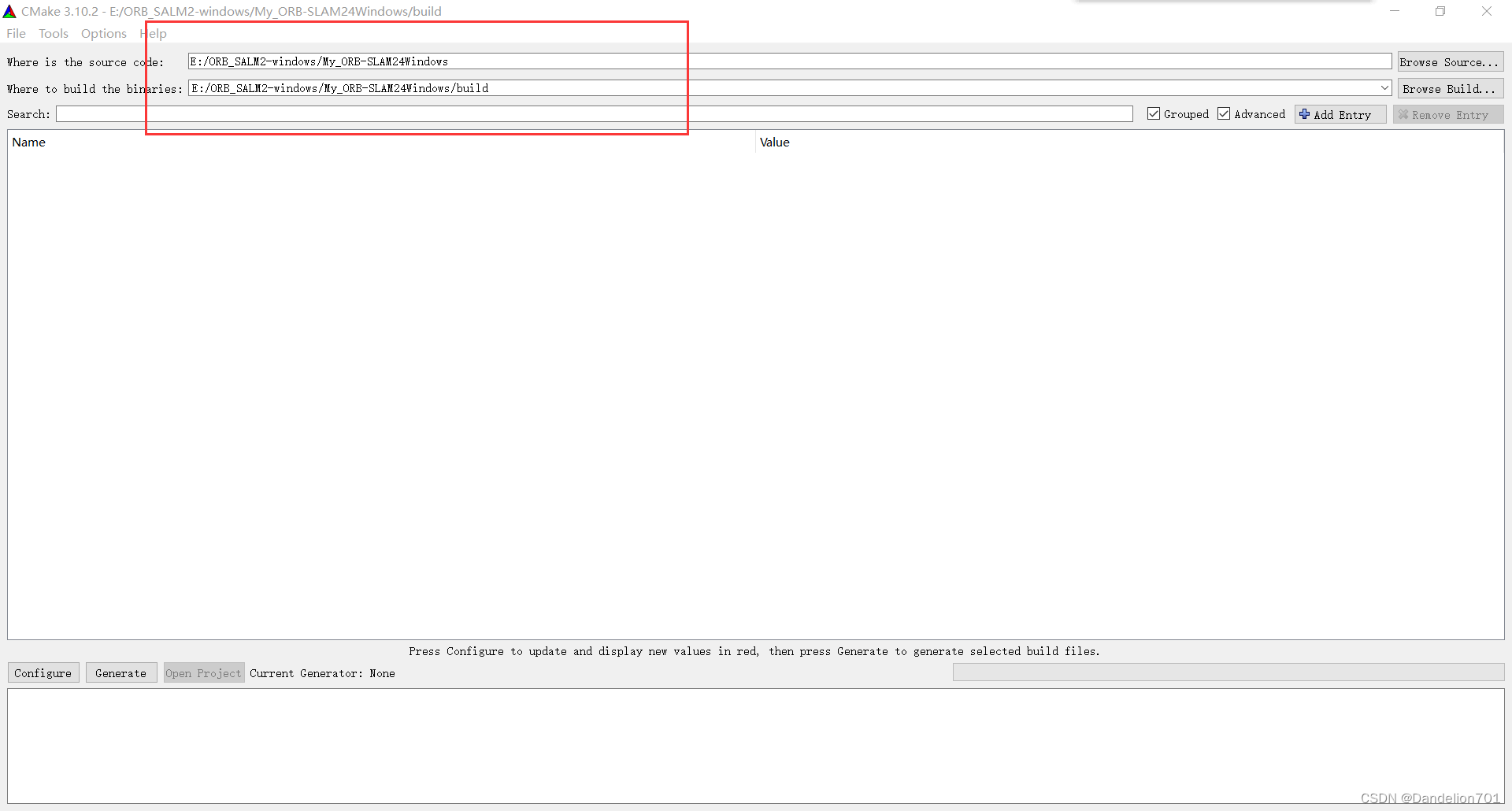
与上面两个库的配置顺序一样,以管理员身份运行cmake软件,创建build文件夹,然后点击configure;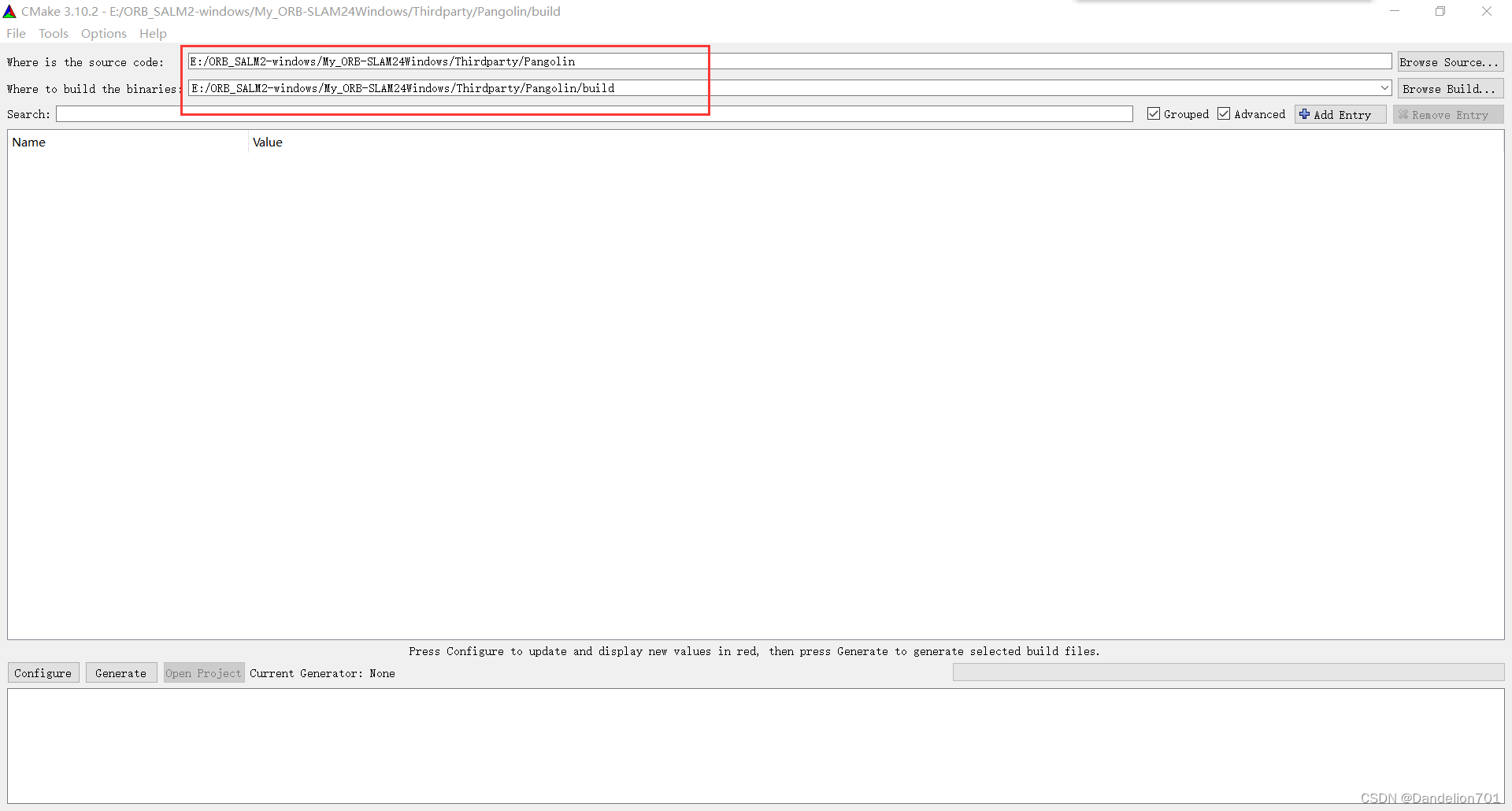
显示如下界面:
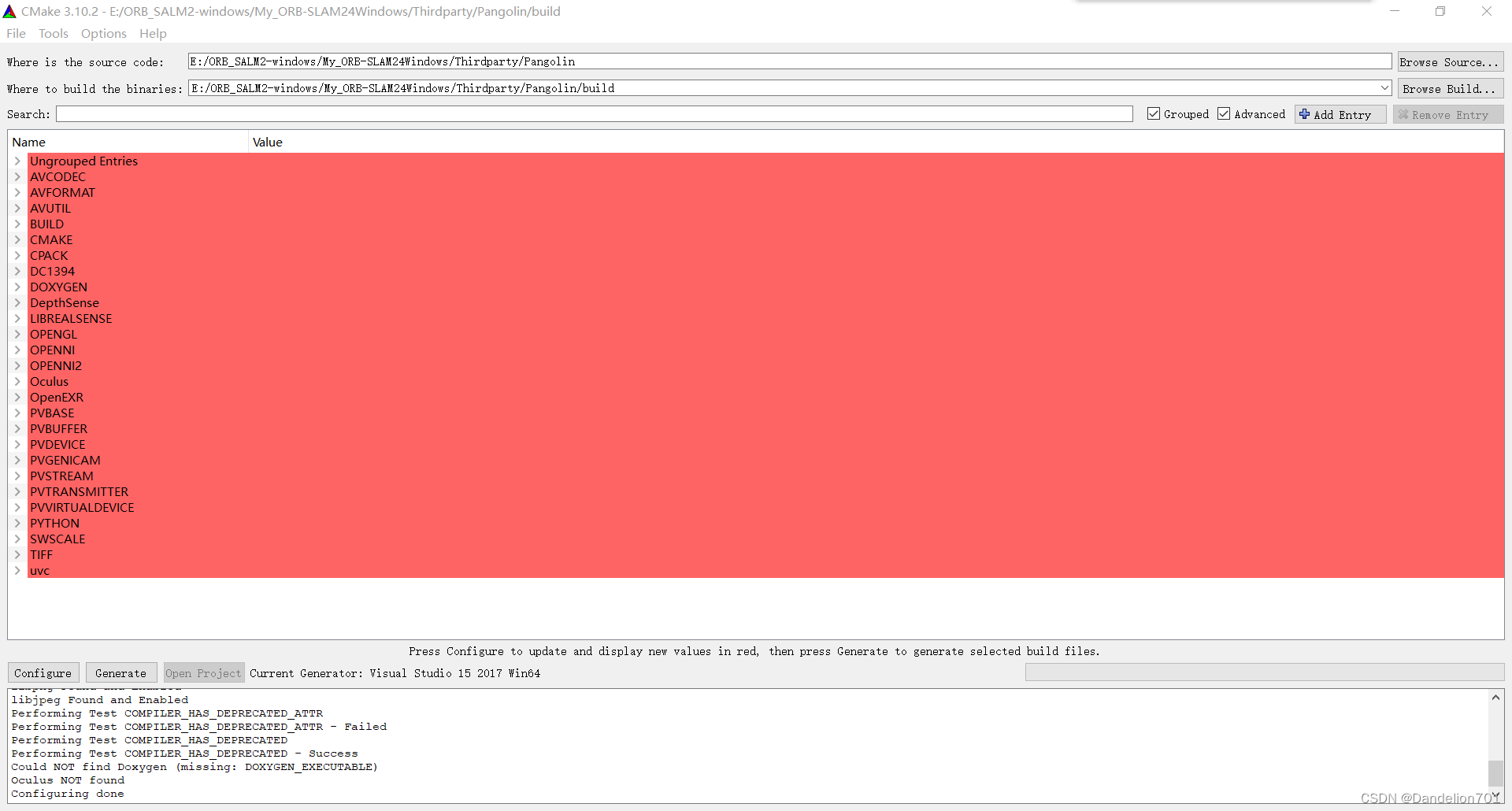
然后点击Generate,Open project,进入VS2017;
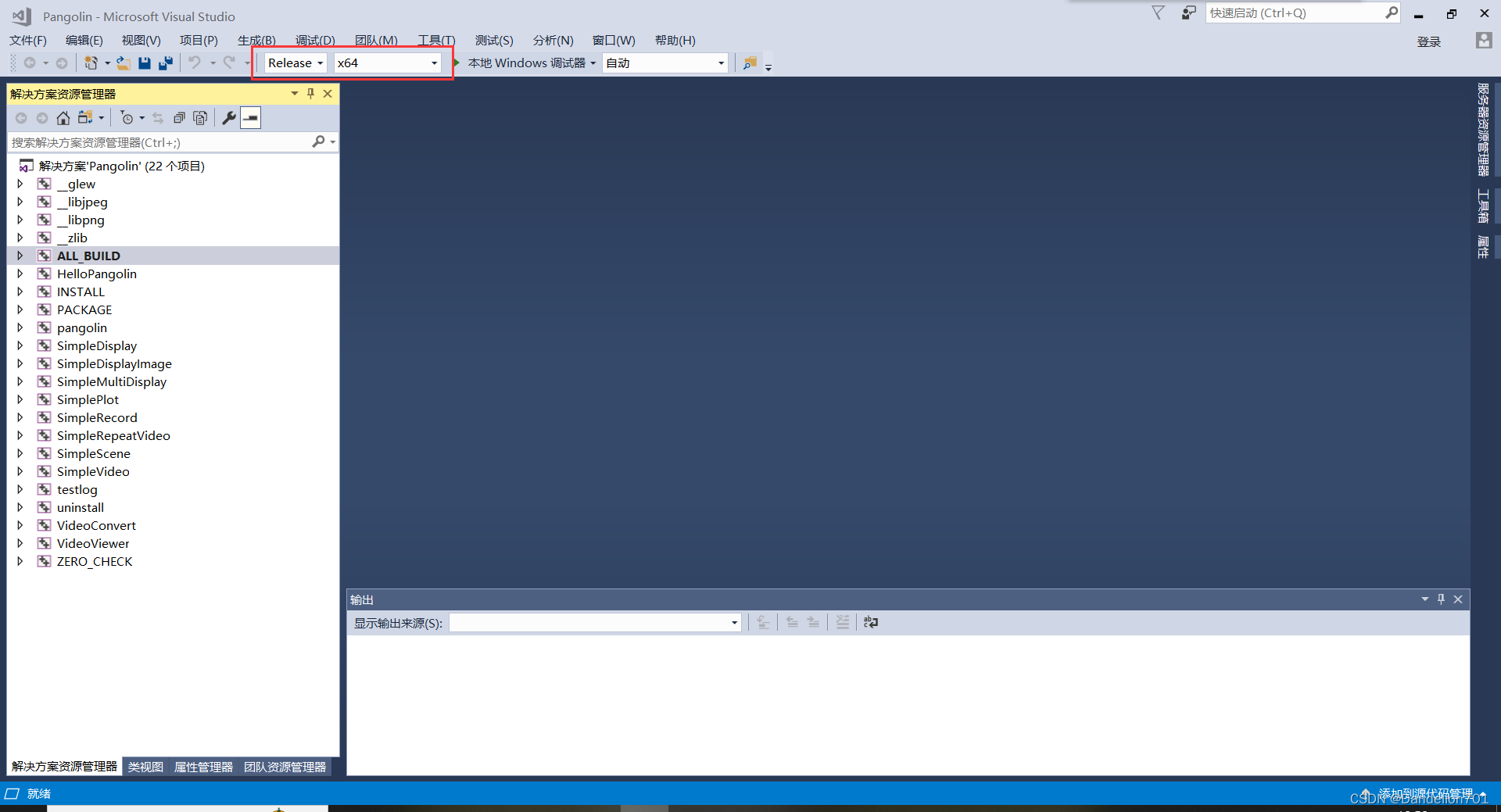
同时保证配置为VS2017和x64模式,由于Pangolin库编译的时候需要再git上下载一些依赖,现在我们打开Git软件,还需要某软件,这里发不出来,就不细讲了,然后根据你自己的IP,git软件上输入以下命令git config --global http.proxy 'socks5://127.0.0.1:7890'(不同ip只需要改最后一个就行了)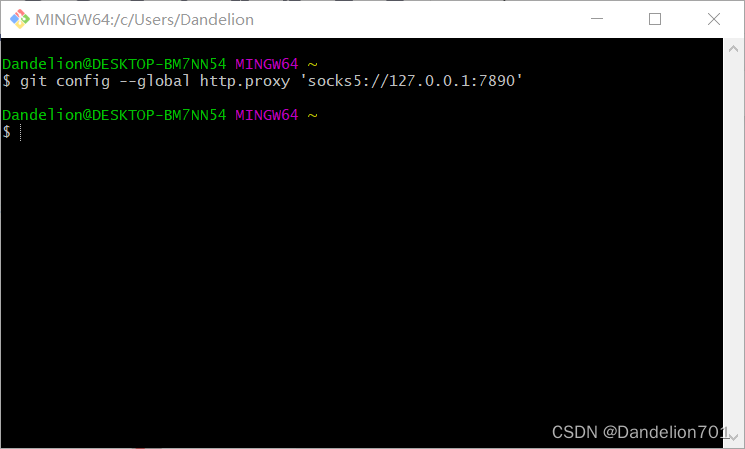
这里配置完成后我们再打开VS2017软件打开的工程,直接右键ALL_BUILD,点击生成;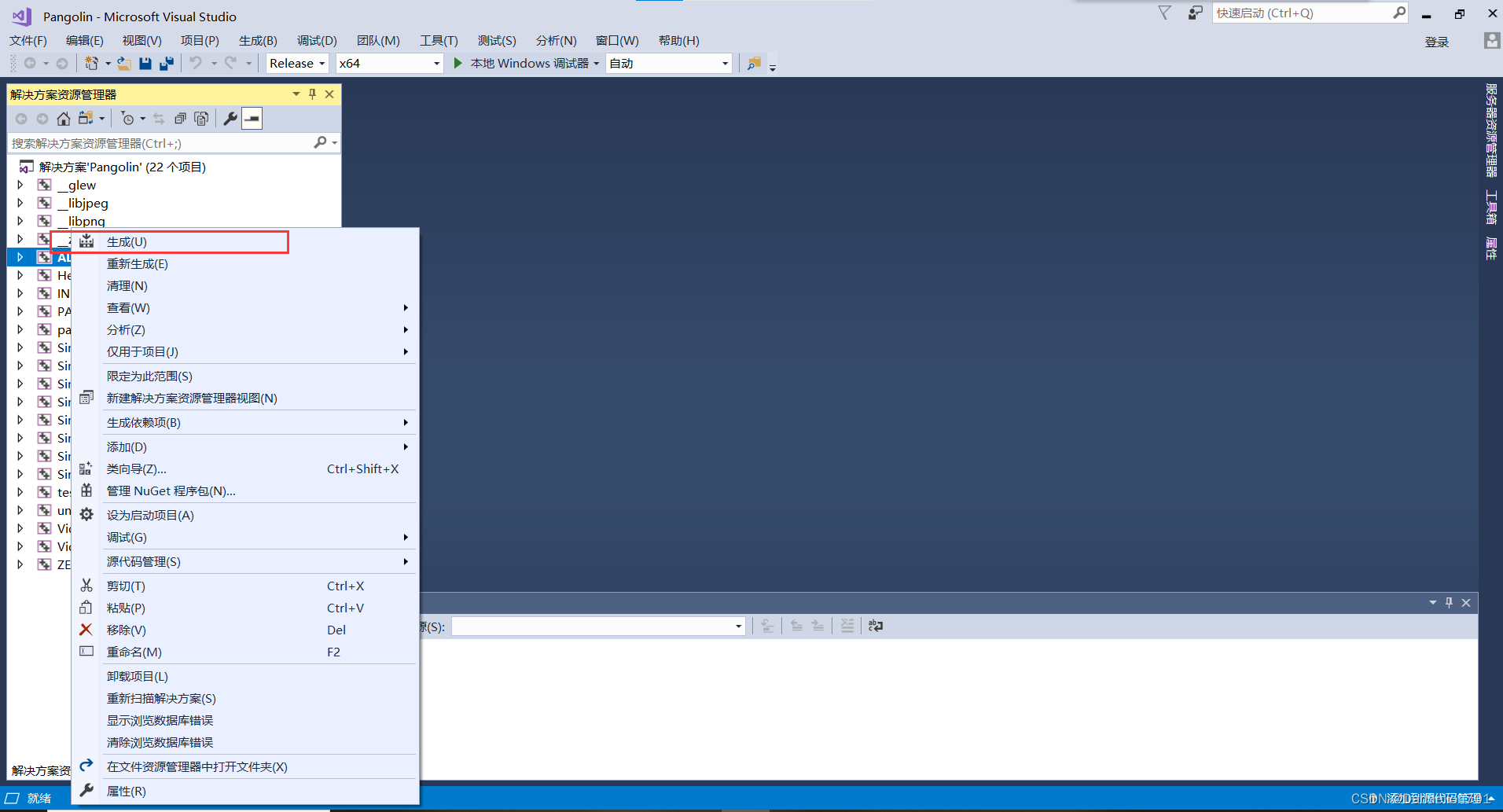
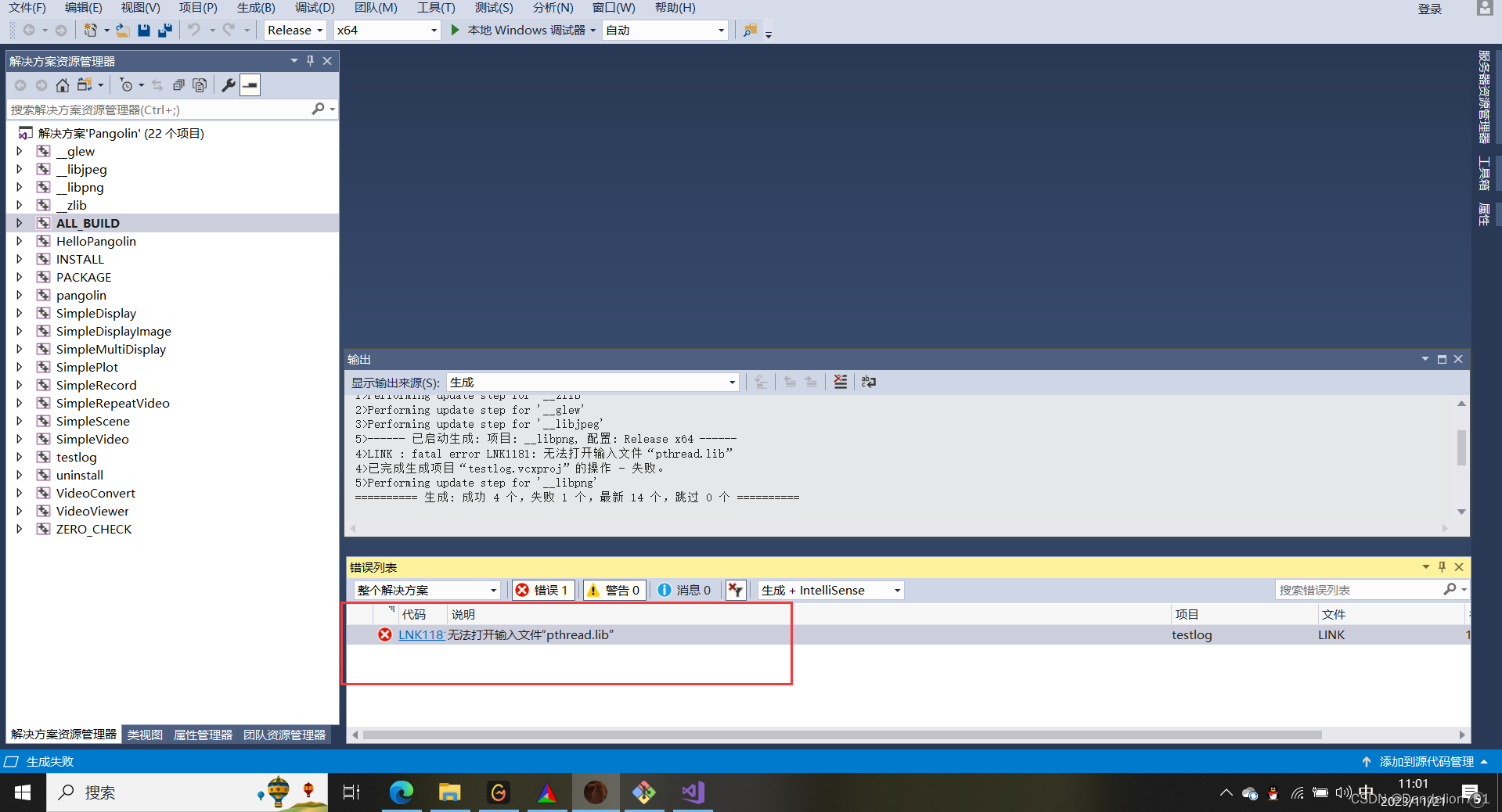
然后这里显示配置成功18个,有一个咱们不管,是pthread.lib;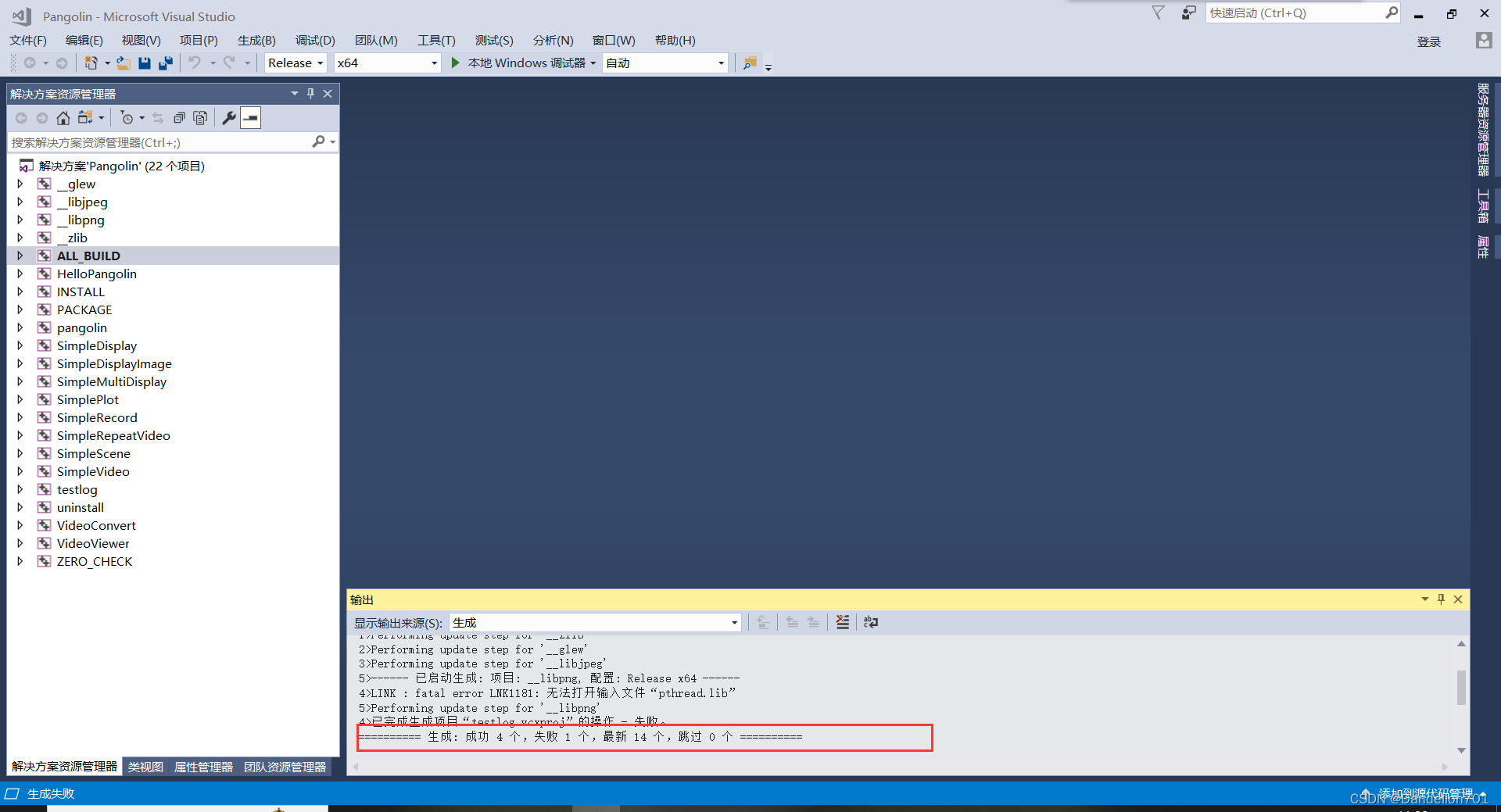
至此,Pangolin库的配置就已经完成了。
五、ORB_SLAM2工程的配置、编译使用
在E:\ORB_SALM2-windows\My_ORB-SLAM24Windows路径下创建一个build文件夹,以管理员身份运行cmake软件,如下配置;
点击configure进行配置,然后报如下错误;
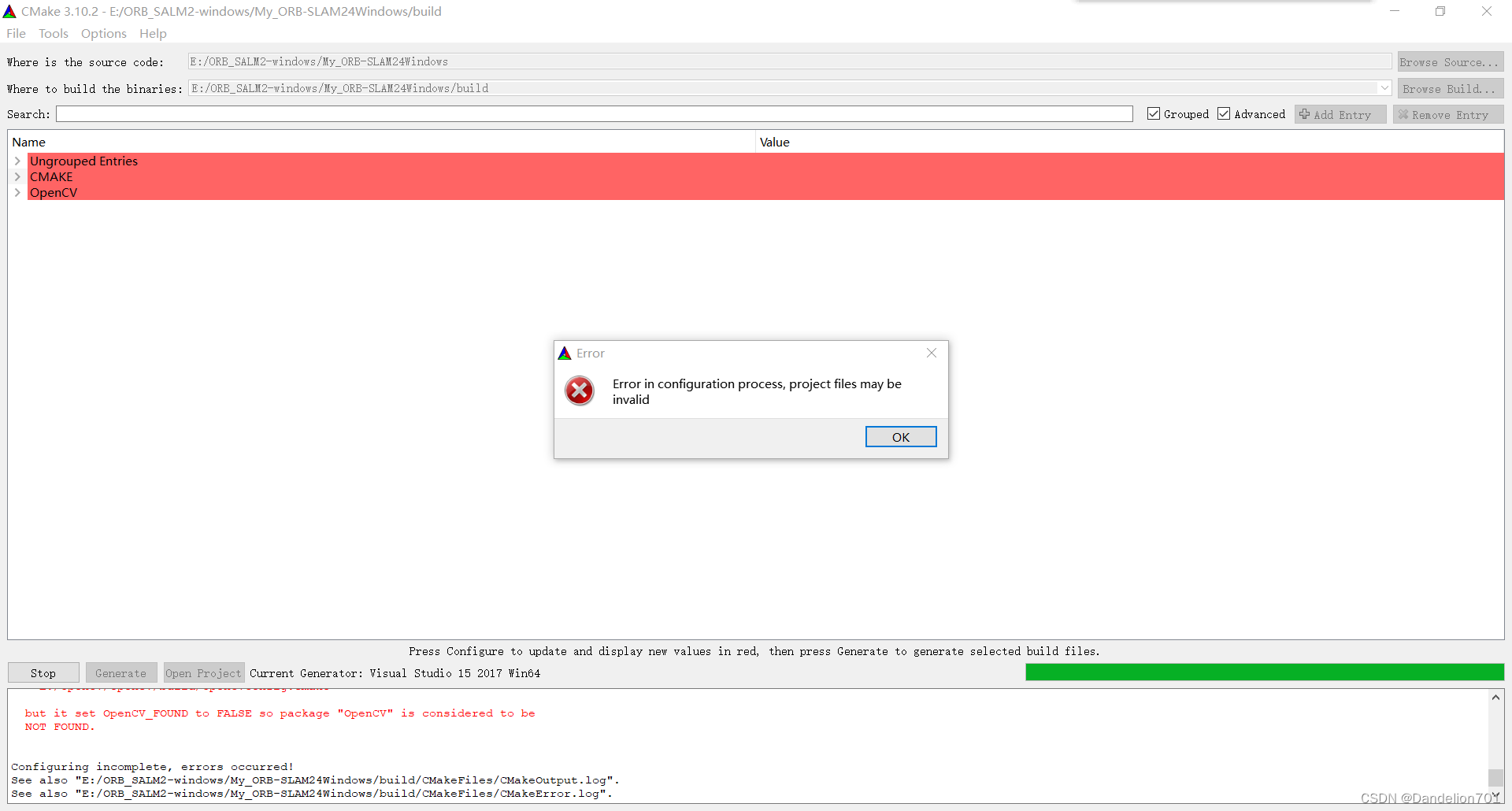
这是因为Opencv库没有找好的原因。按图中步骤修改Opencv的库目录,然后点击Config 和 Generate按钮。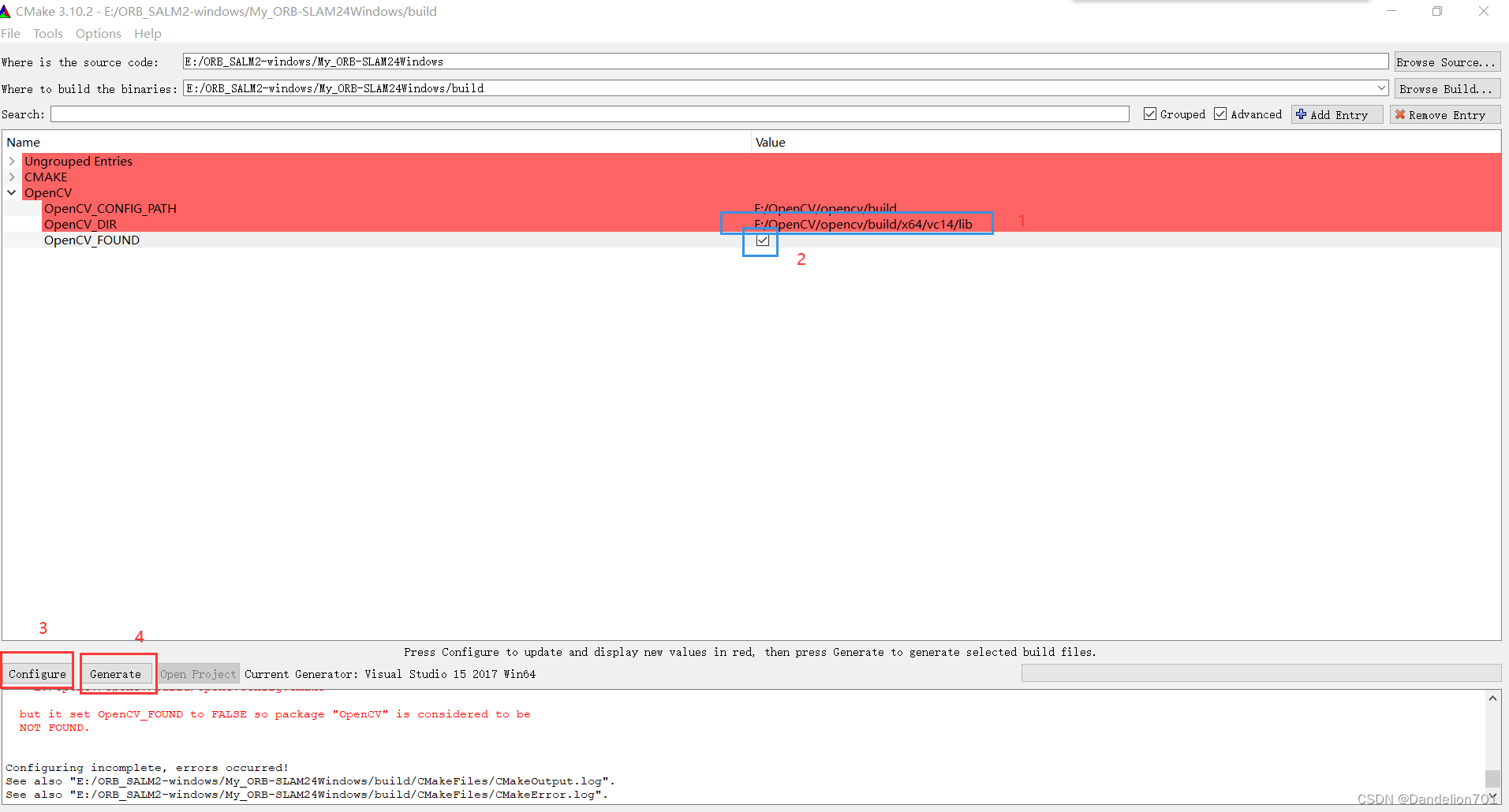
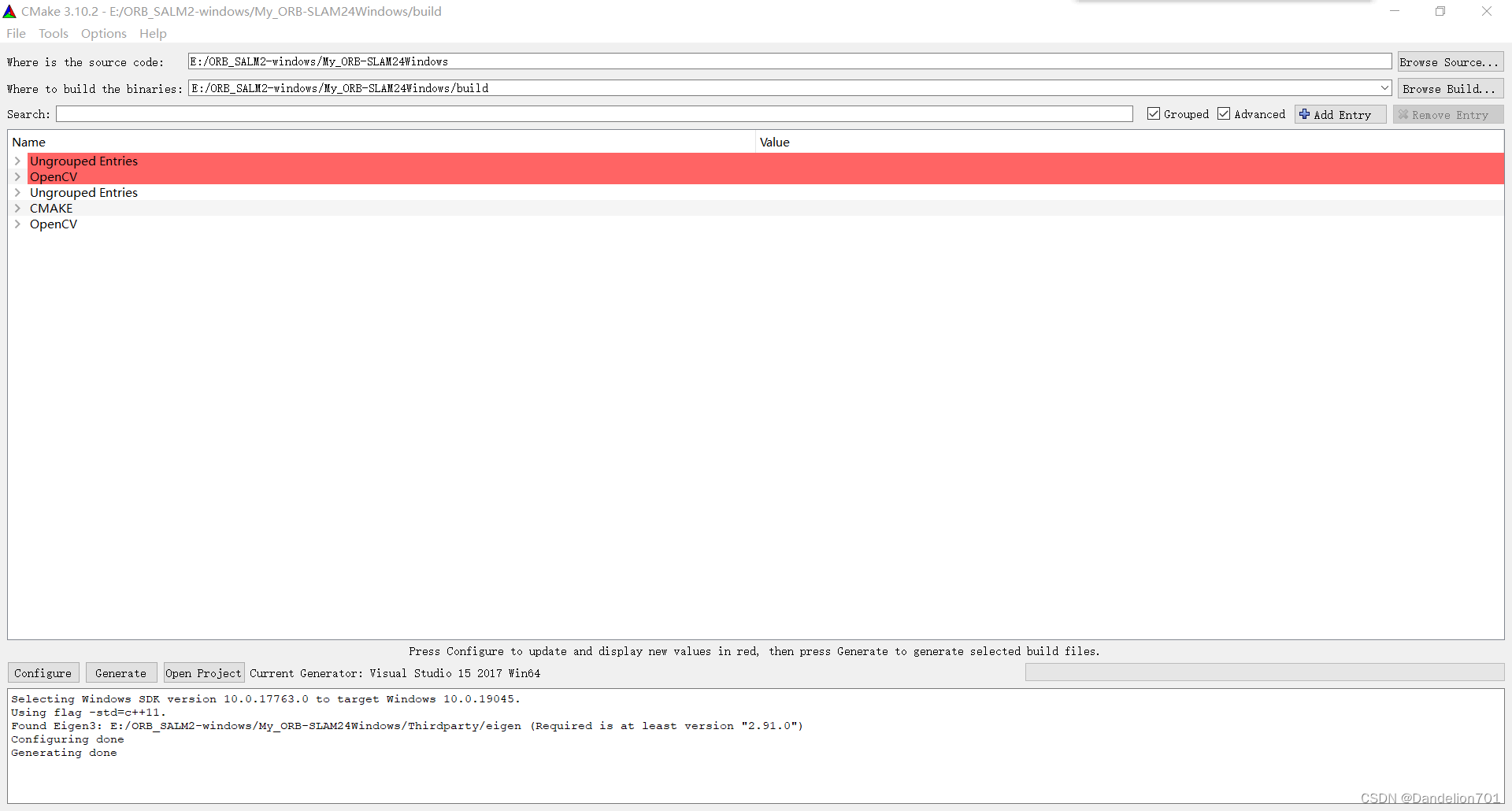
然后Open Project,进入VS2017,同样确保Release和x64模式;
然后右键ALL_BUILD点击生成,我们会发现会报很多错,如下:
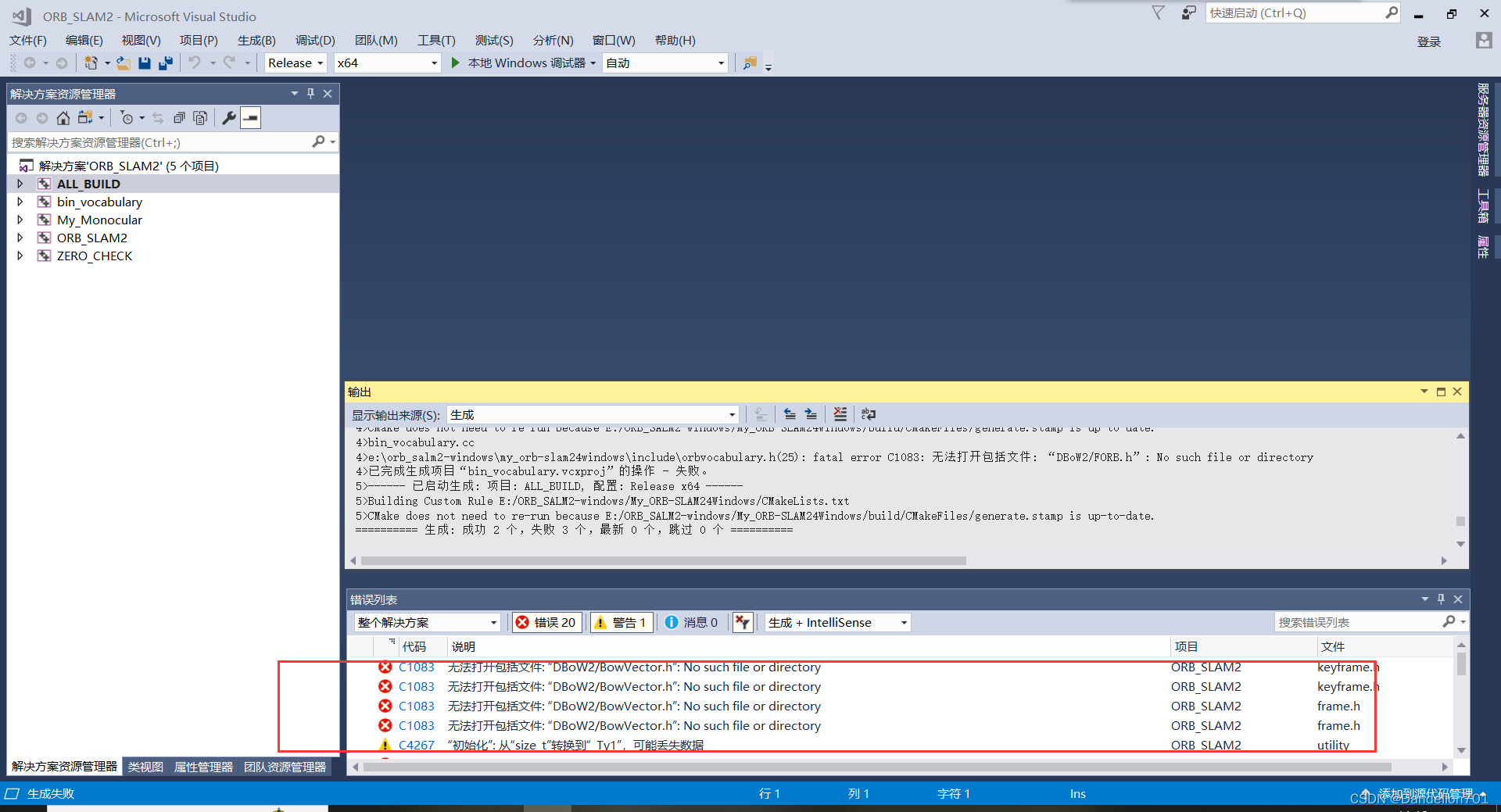
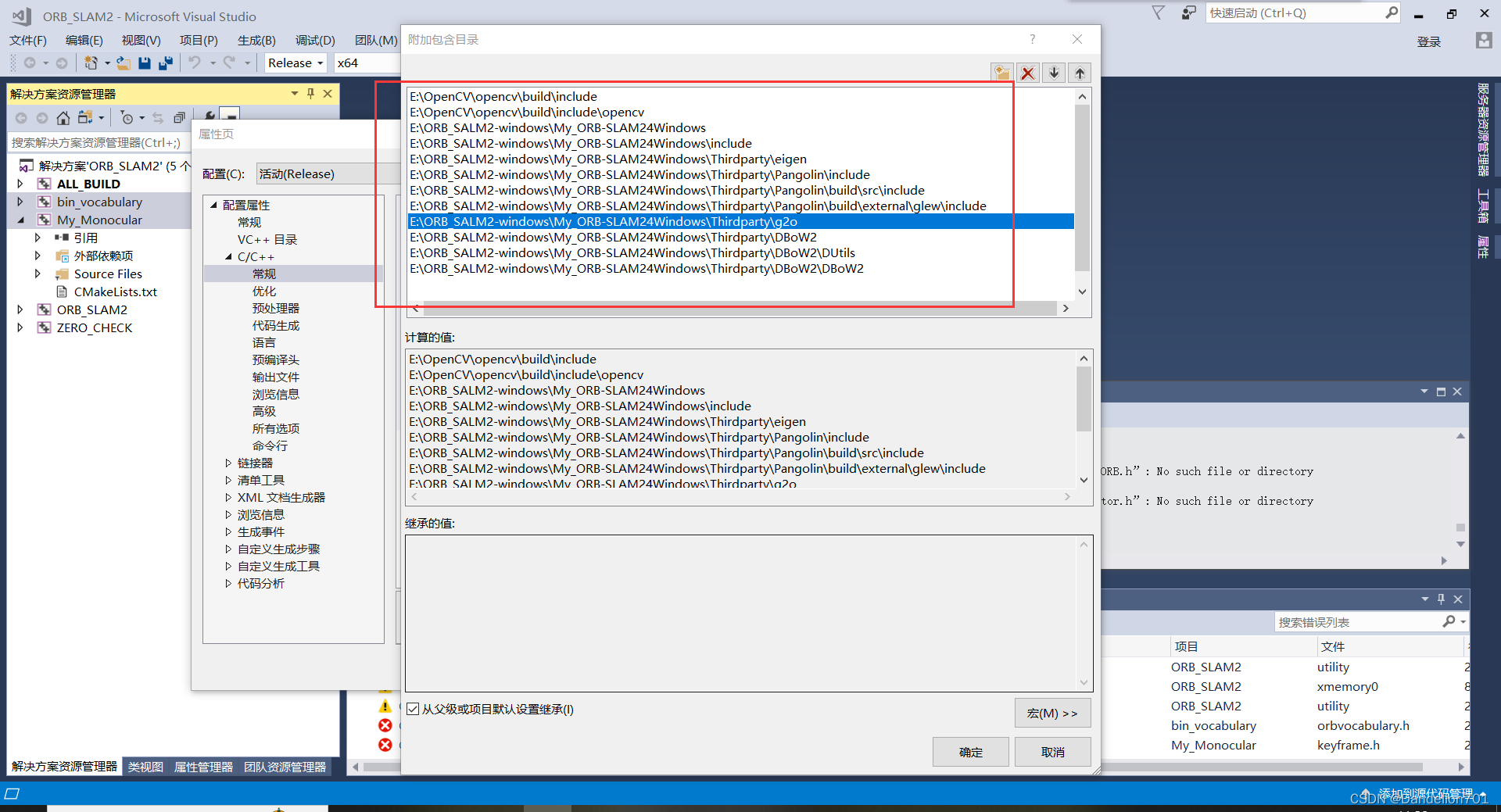
这是因为头文件没有配置好,于是我们对头文件进行配置:右键ORB-SLAM2,点击属性,然后按照图示操作进行库文件的添加(缺哪个库,添加哪个库);

然后再右键ORB-SLAM2点击生成,我们会发现还是报错;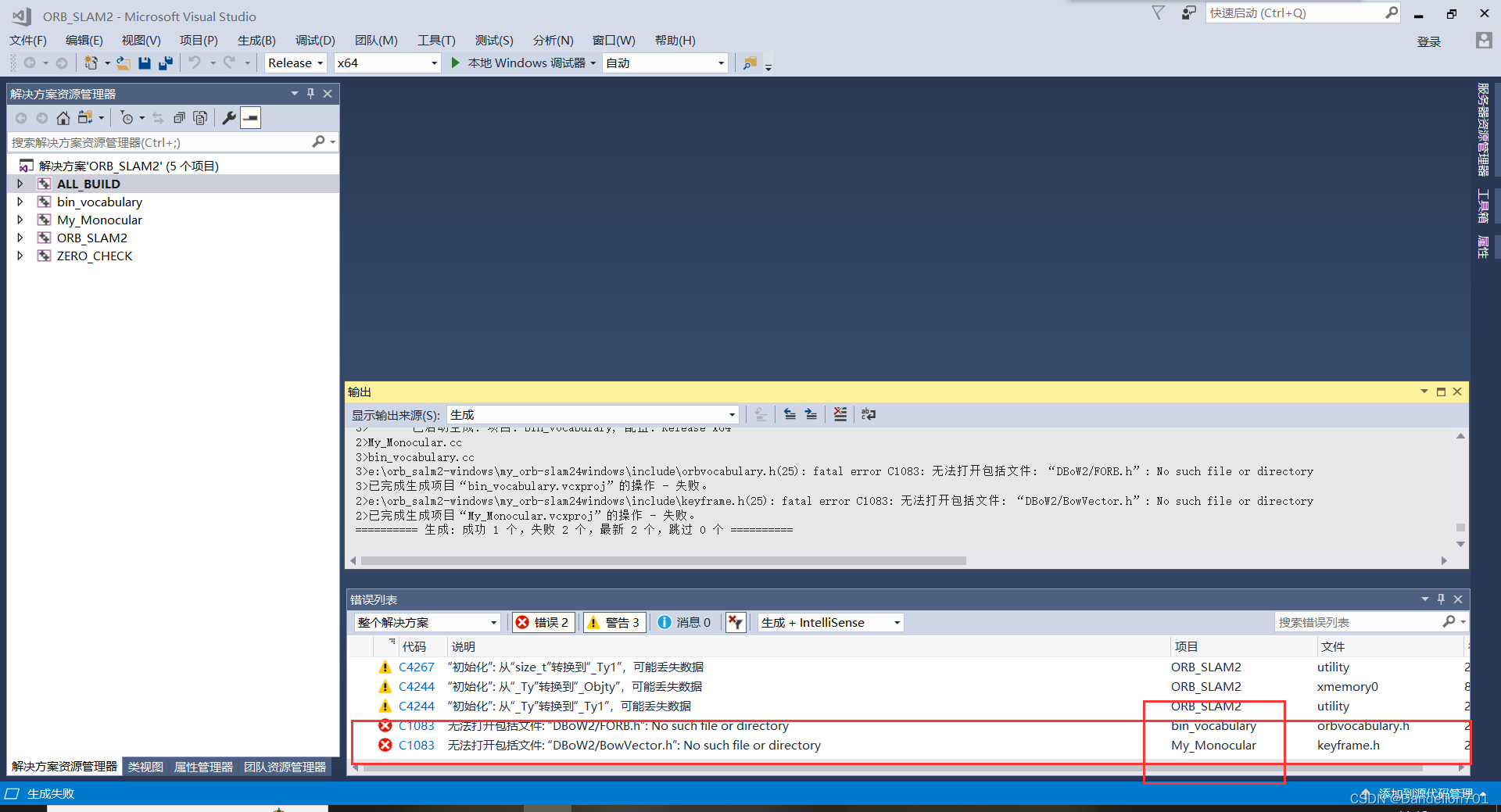
找到这两个库是哪个报错,发现是My_Monocular和bin_vocabulary报错,于是我们分别右键,属性这两个库,添加库文件,缺哪个库添加哪个库;
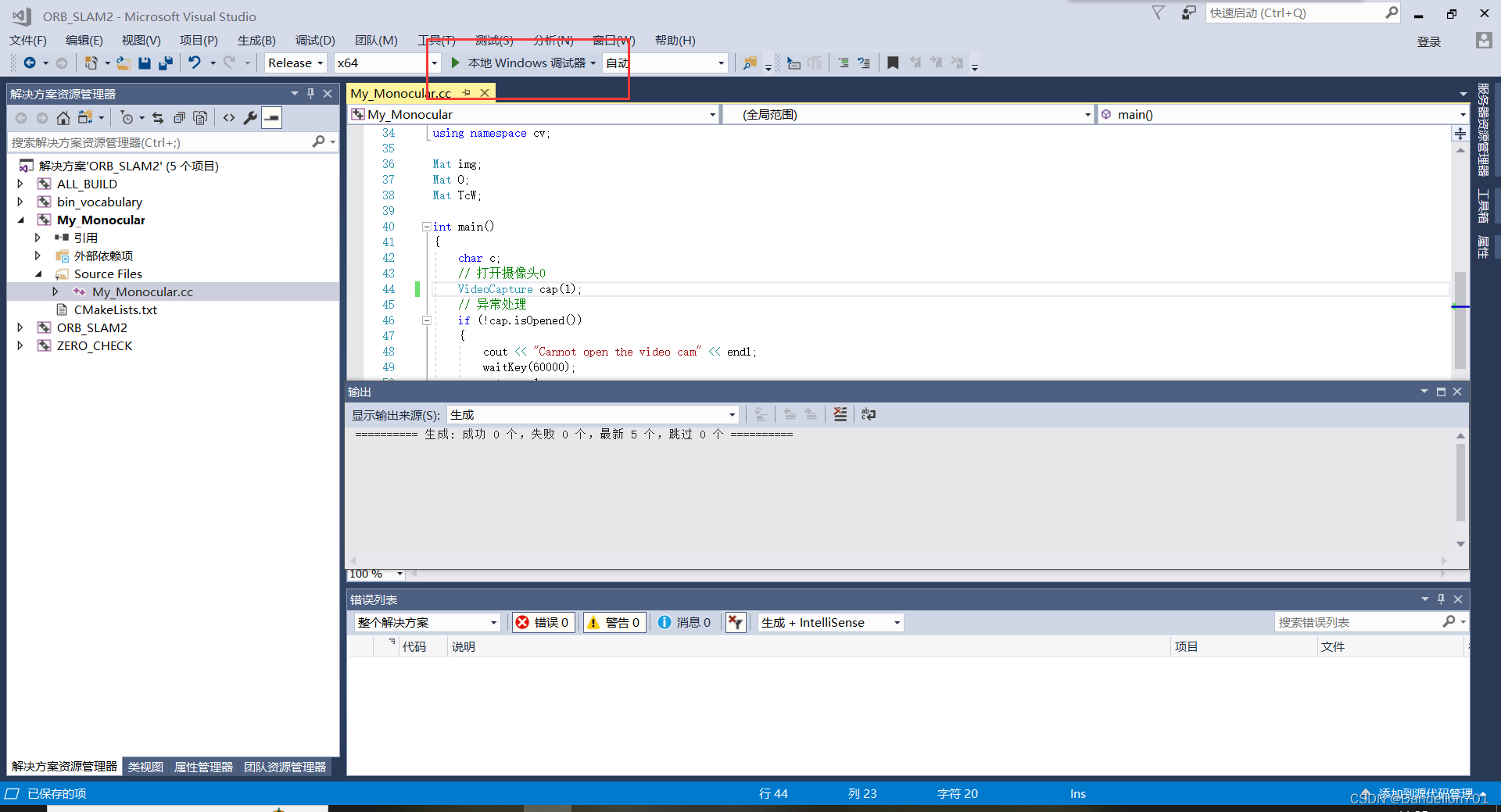
然后我们再右键ALL_BUILD点击生成;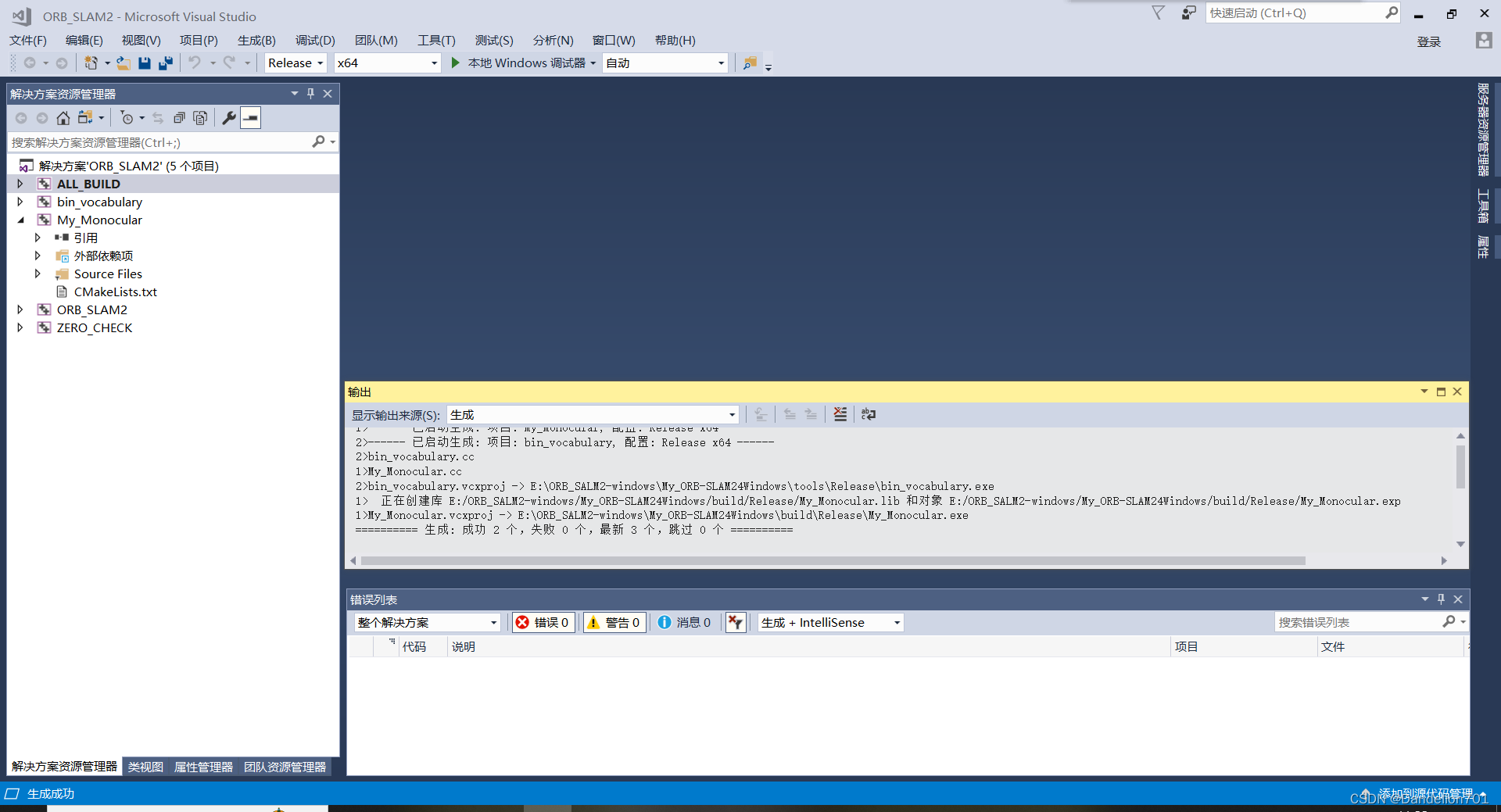 此时,没有报错,生成成功了,一共五个库全部生成成功,然后我们右键My_Monocular,设置为启动项;
此时,没有报错,生成成功了,一共五个库全部生成成功,然后我们右键My_Monocular,设置为启动项;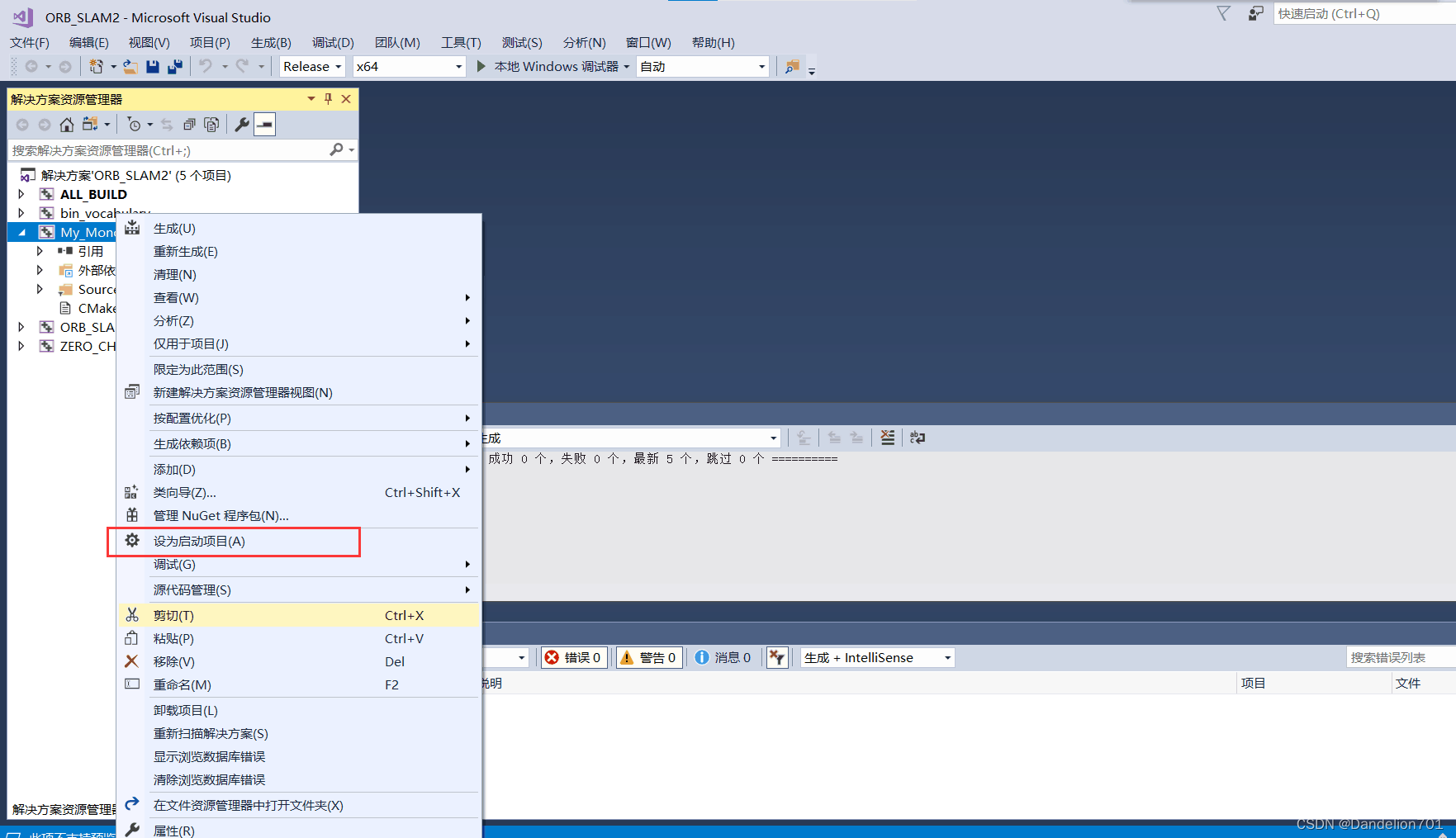
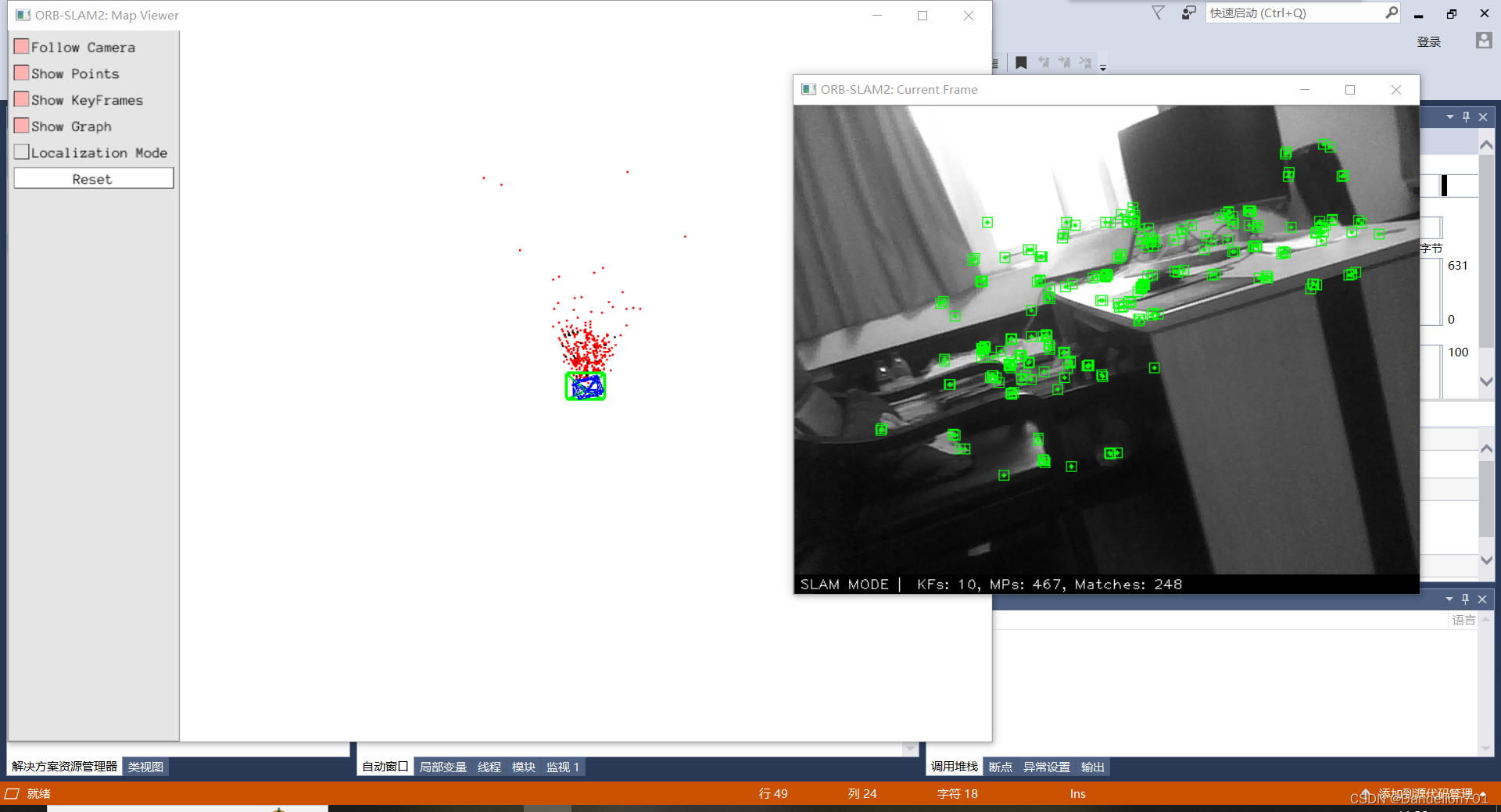
然后运行程序;
出现以下画面,显示运行成功:
至此,整个Windows下配置ORB_SLAM2的教程已经结束了,谢谢大家的阅读,希望给个点赞收藏和关注,希望能够帮到大家。

















 343
343











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











