







文献一:熊锐--基于数字图像处理的显微自动对焦技术研究
1.基于图像处理的自动对焦方法主要分为离焦深度法和聚焦深度法。
2.聚焦深度法的三个重要环节:聚焦评价函数、聚焦窗口、聚焦搜索算法。
3.基于数字图像处理的显微自动对焦技术的原理:首先通过光电成像器件获取目标的清晰图像,然后将获取的图像数据传入计算机,经图像处理算法判别图像清晰度后,计算机根据获取图像的清晰度差异控制机械结构的运动,并最终找到最佳成像位置。
4.手动对焦方法无法满足高精度与稳定性的要求;测距法、对比度检测法、相位检测法等自动聚焦方法需要额外的光机设备,使得对焦系统体积庞大,结构复杂,不符合仪器轻便化的发展趋势。基于数字图像处理的自动对焦法仅需获取的图像信息就能实现自动对焦,相比以上方法,该方法具有结构简单、易于集成、对焦精度高的优点。
5.自动对焦分类:
根据是否具有主动发射系统,分为被动对焦和主动对焦;
根据是否测距,分为测距法和像检测法;像检测法又分为对比度检测法和相位检测法。
6.国外研究现状:
1967,基于图像复原的离焦深度法;
1971,利用图像调制阈值梯度的自动对焦算法;
1975,VAF,采用三角测距法,属于被动式对焦,严重依赖外部光线;
1976,利用光电导单元检测对比度;
1978,SX-70 Sonar,测距法,主动发射超声波对焦;
1979,佳能AF35M,测距法,主动发射红外线对焦;
1981,Pentax ME-F,相位检测法,TCL系统;
2005,利用图像矩调焦的自适应自动对焦;
2009,在多个深度位置处计算获取图像的定量品质因数(FOM),并与深度近似的经验函数(例如高斯,多项式)拟合,然后将确定的拟合函数的峰值作为焦点位置的估计值,合计不超过三个图像数即可计算焦点位置;
2013,将图像归一化方差与离散余弦变换进行组合作为聚焦评价函数;
2017,在数字全息显微术中使用深度学习作为自动对焦方法,该方法的最大优点是,在训练完成后,可以通过仅使用全息图平面中的单个平面而无需任何重构来获得对焦平面;
2019,提出了一种卷积神经网络模型,可以从离焦模糊图像中预测清晰的荧光显微图像以及焦距。
7.国内研究现状:
2005,以图像梯度加阈值求和的清晰度评价函数;
2007,基于边缘梯度的自动聚焦算法。该方法首先通过设置阈值的方式将图像背景与边缘分开,然后对中心像素的一系列像素灰度值排序比较大小,以确定边缘方向,从而在边缘方向分配较大的权值,以加强边缘的贡献;
2009,以图像边缘灰度变化率为评价指标的清晰度评价算法。该算法首先计算出每一行的灰度变化率,最后以图像所有行灰度变化率的均值作为评价指标;
2012,研究了强散粒噪声下的自动聚焦问题。在图像经中值滤波后采用分水岭算法进行处理,并将处理后的小区域像素值以平均值代替,最后采用SML聚焦评价函数计算灰度梯度值;
2014,使用电子可调透镜(ETL)的快速变焦光声显微镜(VF-PAM),其聚焦深度可以根据电信号变化并连续移动;
2016,去除饱和像素的清晰度评价算法;
2017,将重构图像的幅度差平方作为聚焦评价函数,并将聚焦平面定位在其极值处,而不取决于图像的清晰度。通过使用数值模拟和光学实验,证实了幅度差(DIF)方法的有效性;
2018,基于图像直方图特征函数的聚焦评价函数;
2019,利用卷积神经网络(HH-net)提取图像高级抽象特征,以此替代传统的聚焦评价函数,实现显微图像清晰度评价及离焦量预测;
2020,自适应高斯插值方法并使用多众数平均值作为对焦感兴趣区域的对焦深度值,修复了液晶透镜成像系统基于模糊量的离焦深度对焦法所得深度图中存在的两种错误,最后使用经一阶线性拟合后的光焦度曲线进行对焦,大大减少了液晶透镜测量所需时间。
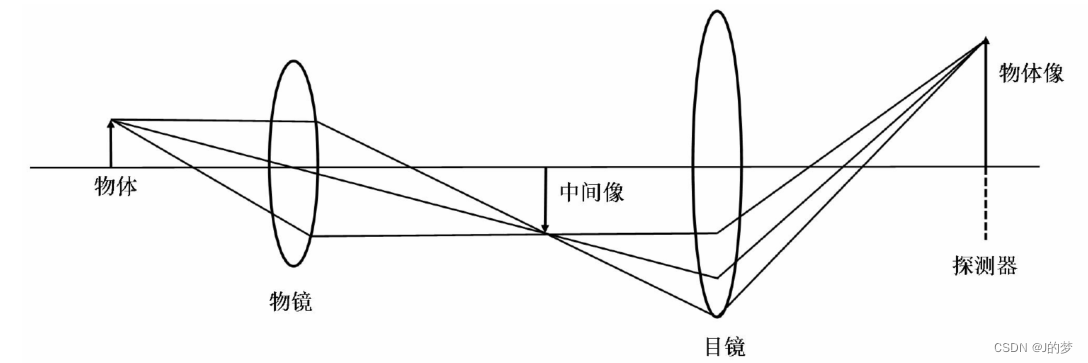
8.显微镜成像原理
依据二次成像原理,先经物镜而成倒立放大实像,再经目镜二次放大后由图像探测器接收。
显微镜主要参数包括数值孔径、放大率、分辨率。数值孔径代表了显微镜头收集光线的能力,其计算公式如下: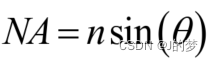 ,其中,n为物空间介质折射率,cita为物镜光轴与最外光线夹角;若物镜,目镜的放大率分别为a、B,则显微镜总放大率M=aB;显微镜分辨率是指显微镜能分辨的最小距离:
,其中,n为物空间介质折射率,cita为物镜光轴与最外光线夹角;若物镜,目镜的放大率分别为a、B,则显微镜总放大率M=aB;显微镜分辨率是指显微镜能分辨的最小距离: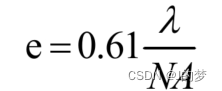 ,renm
,renm
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 280
280

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









