







背景
三相UPS一般情况下为大设备供电,提高电源输出功率最有效的办法就是将两台设备或者多台设备并联。多个设备的并联就会带来另一个问题,如何将功率平均的分配在并联的电源上。如果是通过互连线连接各个系统的话,会受到比较多的干扰,一旦互连线出现故障,就会导致系统的故障。
下垂技术是通过电压和频率的下垂特性对逆变器的输出的无功功率和有功功率进行控制。实现方法就是通过检测测量输出电容电压、电感电流计算出来功率,获取参考值。具体框图如下
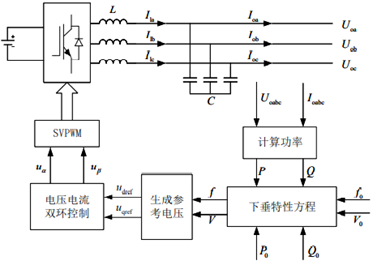
其中L、C分别为逆变器的滤波电感和滤波电容,逆变器的输出电压为Uoa、Uob、Uoc,输出电流为Ioa、Iob、Ioc。下垂控制方法如下,由电压、电流传感器和调理电路组成的测量单元对逆变器输出的电压电流进行同步采样,由下垂控制中的功率计算单元计算出逆变器输出的有功功率和无功功率的平均值,通过 P-f和Q-V的下垂特性方程计算出电压和频率指令,参考电压环节将电压和频率指令合成在dq轴上的电压给定送入电压电流 闭环控制环节,双闭环控制环节经 PI 调节获得SVPWM所需要的参量。
逆变器下垂控制原理
可以将两台逆变器等效成如下的模型
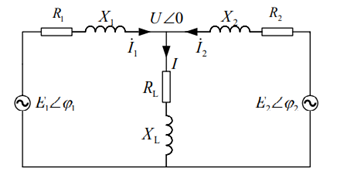
两台逆变器输出阻抗与连线上的阻抗之和分别为Z1和Z2,其中Z1=R1+jX1=RZ1∠θ1,Z2=R2+jX2=RZ2∠θ2;E1和E2分别为两台设备空载电压幅值以其为参考则j1、j2分别为两台设备输出电压的相角。根据以上电路可以得出设备n的输出的电流如下图所示
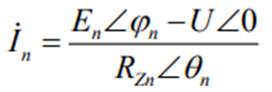
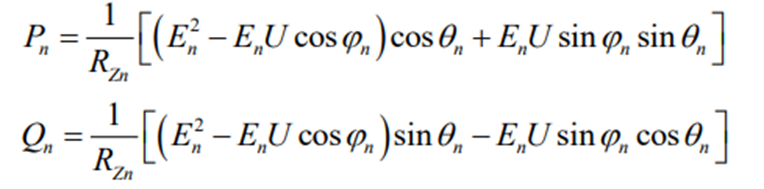
输出功率如下图所示
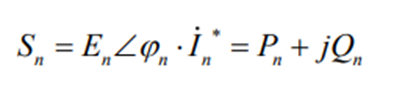
Pn和Qn分别代表设备的输出功率,联立以上两个式子,可以得到下式
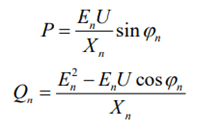
在实际电路中,线路阻抗可能不是纯感性,但是感性应该是远远大于阻性,所以当作纯感性对待。当Z1和Z2为纯感性时,θ1=θ2=90°,可以将上式简化为如下公式
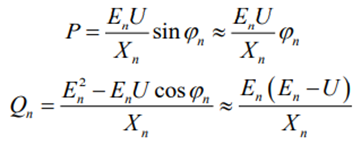
考虑到情况,ZL是远远大于Z1和Z2的,所以j1、j2都比较小,可以得到以下公式
对两边同时微分可得以下公式
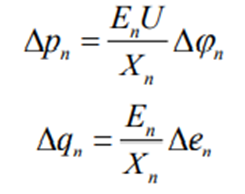
不难发现,逆变器输出的有功功率与输出空载电压的相角有关系,而无功功率的输出与输出空载电压的幅值有关系。假设逆变器空载时输出的电压和角频率分别为E0和ω0,则有以下关系式
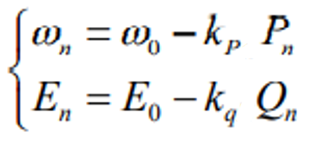
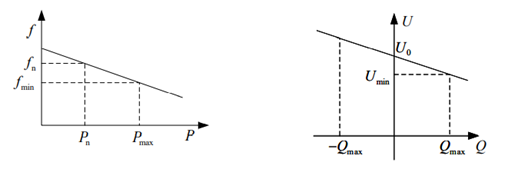
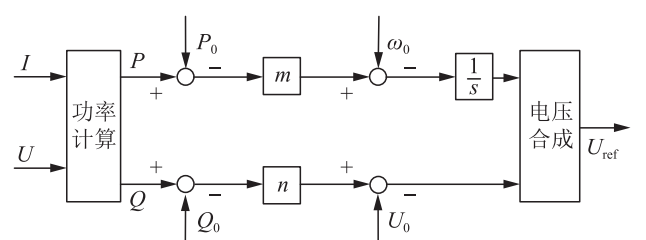
其中的kp、kq表示下垂系数。由上式可以得出,当某一设备输出有功功率过高时,可以通过降低自身频率来降低输出的有功功率。当某一设备的输出的无功功率过高时,可以通过讲点输出电压幅值来降低输出的无功功率。下垂特性曲线如下图所示
下垂控制框图
Matlab function实现
vsd_ref1 = 110*sqrt(2) -(presentQinst-0)*1e-5; %presentQinst无功功率目标值
vsq_ref1 = 0;
wref1 = 2*pi*50 - (presentPinst - 4400)*2e-5; %presentPinst有功功率目标值
if(vsd_ref>130*sqrt(2)) %限幅
vsd_ref = 130*sqrt(2);
elseif(vsd_ref<90*sqrt(2))
vsd_ref = 90*sqrt(2);
end
if(wref1>50.5*2*pi)
wref1 = 50.5*2*pi;
elseif(wref1<49.5*2*pi)
wref1 = 49.5*2*pi;
end
ph = ph2 + Ts*wref1; %角频率积分得到角度
ph = rem(ph,2*pi);注意事项
可以通过以下的公式来得到下垂因数的具体值,一般是在e-5的数量级。
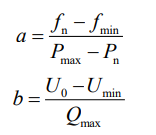
Pmax 为系统在允许的最小频率 fmin下输出的最大功率, Qmax 为系统在电压幅 值降低到最小允许值时的最大无功功率。 2.一般要求输出电压的变化值在5%内,频率的变化值在1%以内。
3.在计算功率的时候,由于瞬时功率中含有高频部分,所以要进行低通滤波,控制效果会比较好。
4.在多台逆变器并联式,用功下垂系数和无功下垂系数分别满足以下公式
由上可以看出,有功下垂系数至于有功功率的分布有关,而无功系数和线路阻抗也有关系。


















 1932
1932

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











