






一、相关知识拓展
1.关于串口通信协议
串口通信指两个或两个以上的设备使用串口按位(bit)发送和接收字节。可以在使用一根线发送数据的同时用另一根线接收数据。 串口通信协议就是串口通讯时共同遵循的协议。 协议的内容是每一个bit 所代表的意义。 常用的串口通信协议 有以下几种
1 RS-232(ANSI/EIA-232标准) 只支持 点对点, 最大距离 50英尺。最大速度为128000bit/s, 距离越远 速度越慢。 支持全双工(发送同时也可接收)。
2 RS-422(EIA RS-422-AStandard),支持点对多一条平衡总线上连接最多10个接收器 将传输速率提高到10Mbps,传输距离延长到4000英尺(约1219米),所以在100kbps速率以内,传输距离最大。支持全双工(发送同时也可接收)。
3 RS-485(EIA-485标准)是RS-422的改进, 支持多对多(2线连接),从10个增加到32个,可以用超过4000英尺的线进行串行通行。速率最大10Mbps。支持全双工(发送同时也可接收)。2线连接时 是半双工状态。
2.关于RS-232标准
RS-232是美国电子工业联盟制定的串行数据通信接口标准,原始编号全称是EIA-RS-232(简称RS232),它被广泛用于DCE(Data Communication Equipment ) 和 DTE(Data Terminal Equipment) 之间的连接。DCE可以理解为数据通信端,比如modem设备;DTE可以理解为数据终端,比如电脑。最早的台式电脑都会保留9针的232接口,用于串口通信,目前基本被USB接口取代。现在RS232接口常用于仪器仪表设备,PLC以及嵌入式领域当作调试口来使用。
协议详细定义了信号的电气特性、时序、逻辑电平和连接器的物理尺寸及引脚定义功能,下面将分别讲述。
2.1接口的定义

其中DTR/DSR和RTS/CTS用于硬件流控。
DTR/DSR状态表明DTE和DCE处于可用状态,有时候设备上电这两个信号即有效,表示设备本身可用使用,但要开始进行数据传输通讯,则需要RTS/CTS流控信号。
RTS即DTE发送数据时,该信号有效(ON),向DCE请求发送数据;CTS是对请求发送RTS信号的响应,当DCE已经准备好接收数据时,该信号有效(ON),通知DTE可用使用TXD发送数据了。比如A向B发送数据简单如下逻辑:
1.A先设置RTS为1,表示要发数据给B
2.B检测到RTS为1,先看看自己是否准备好:如果准备好,就设置CTS为1表示A可用发数据给B了如果没有准备好,继续处理自己的数据。弄完了,再将CTS设置为1,让A发数据
3.A发现CTS置1了,将数据通过TXD信号线发送出去
4.A每发送一次数据给B之前,都会继续上面的逻辑
5.A发送完数据后,就将RTS置0,表示数据发送完毕
2.2硬件连接
硬件连接分三种
(1)9线式连接示意图

(2)5线式连接示意图

(3)3线式连接示意图

2.3电平及时序
RS232采用负逻辑电平,定义如下:

下图是使用RS232接口按照UART串口协议进行传输,UART协议具体请参考UART详解。图中传输的数据为0100 1011b 即0x4B,按照1bit开始位,8bit数据位,1bit停止位格式传输。

2.4最大通讯距离及速率
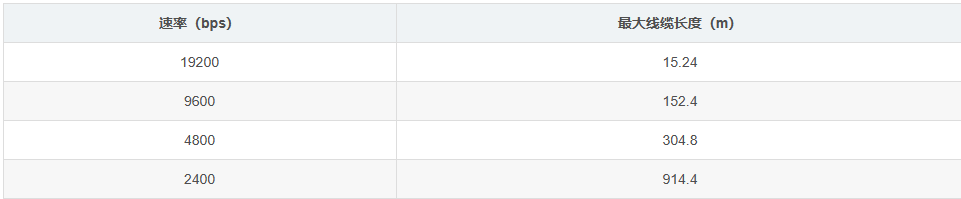
协议最初规定设备最大速率为20kbps,对于16550A UART最大速率为1.5Mbps。码元畸变小于4%的情况下,DTE 和 DCE 之间最大传输距离为 15m(50 英尺)。可见这个最大的距离是在码元畸变小于 4%的前提下给出的。为了保证码元畸变小于 4%的要求,接口标准在电气特性中规定,驱动器的负载电容应小于 2500pF。对于普通导线,其电容值约为 170pF/m,则允许距离 L=2500pF/(170pF/m)=15m。当速率下降时,传输距离会成倍增加,下表是Texas Instruments 在不同速率下对应的传输线缆长度:
3.TTL电平和RS-232电平的区别
(一)、TTL电平标准
输出 L: <0.8V ; H:>2.4V。
输入 L: <1.2V ; H:>2.0V
TTL器件输出低电平要小于0.8V,高电平要大于2.4V。输入,低于1.2V就认为是0,高于2.0就认为是1。于是TTL电平的输入低电平的噪声容限就只有(0.8-0)/2=0.4V,高电平的噪声容限为(5-2.4)/2=1.3V。
(二)、RS232标准
在TXD和RXD数据线上:
(1)逻辑1为-3~-15V的电压
(2)逻辑0为3~15V的电压
在RTS、CTS、DSR、DTR和DCD等控制线上:
(1)信号有效(ON状态)为3~15V的电压
(2)信号无效(OFF状态)为-3~-15V的电压
这是由通信协议RS-232规定的。
RS-232:标准串口,最常用的一种串行通讯接口。有三种类型(A,B和C),它们分别采用不同的电压来表示on和off。最被广泛使用的是RS-232C,它将mark(on)比特的电压定义为-3V到-12V之间,而将space(off)的电压定义到+3V到+12V之间。传送距离最大为约15米,最高速率为20kb/s。RS-232是为点对点(即只用一对收、发设备)通讯而设计的,其驱动器负载为3~7kΩ。所以RS-232适合本地设备之间的通信。
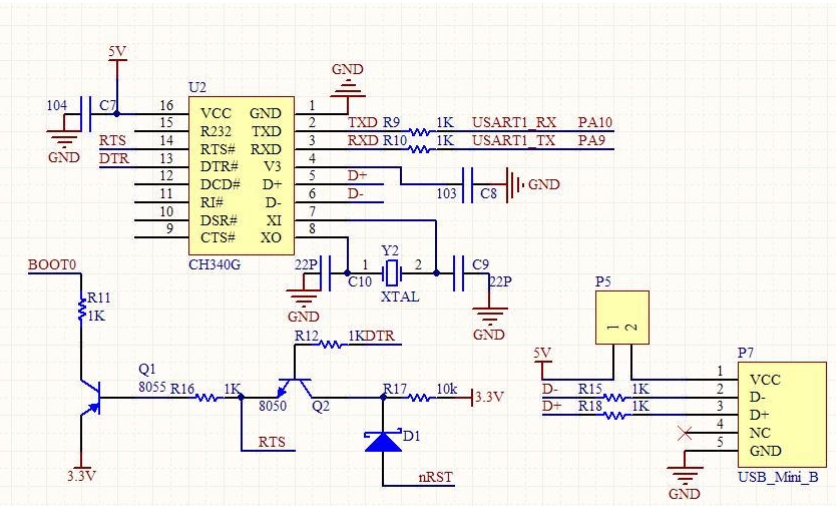
4.CH340芯片模块为例了解“USB/TTL转232”模块的工作原理
CH340 是一个USB 总线的转接芯片,实现USB 转串口、USB 转IrDA 红外或者USB 转打印口。为了增加串口通讯的远距离传输及抗干扰能力,RS-232标准使用-15V 表示逻辑 1, +15V 表示逻辑 0。常常会使用 MH340芯片对 USB/TTL与RS-232电平的信号进行转换。
CH340工作原理图
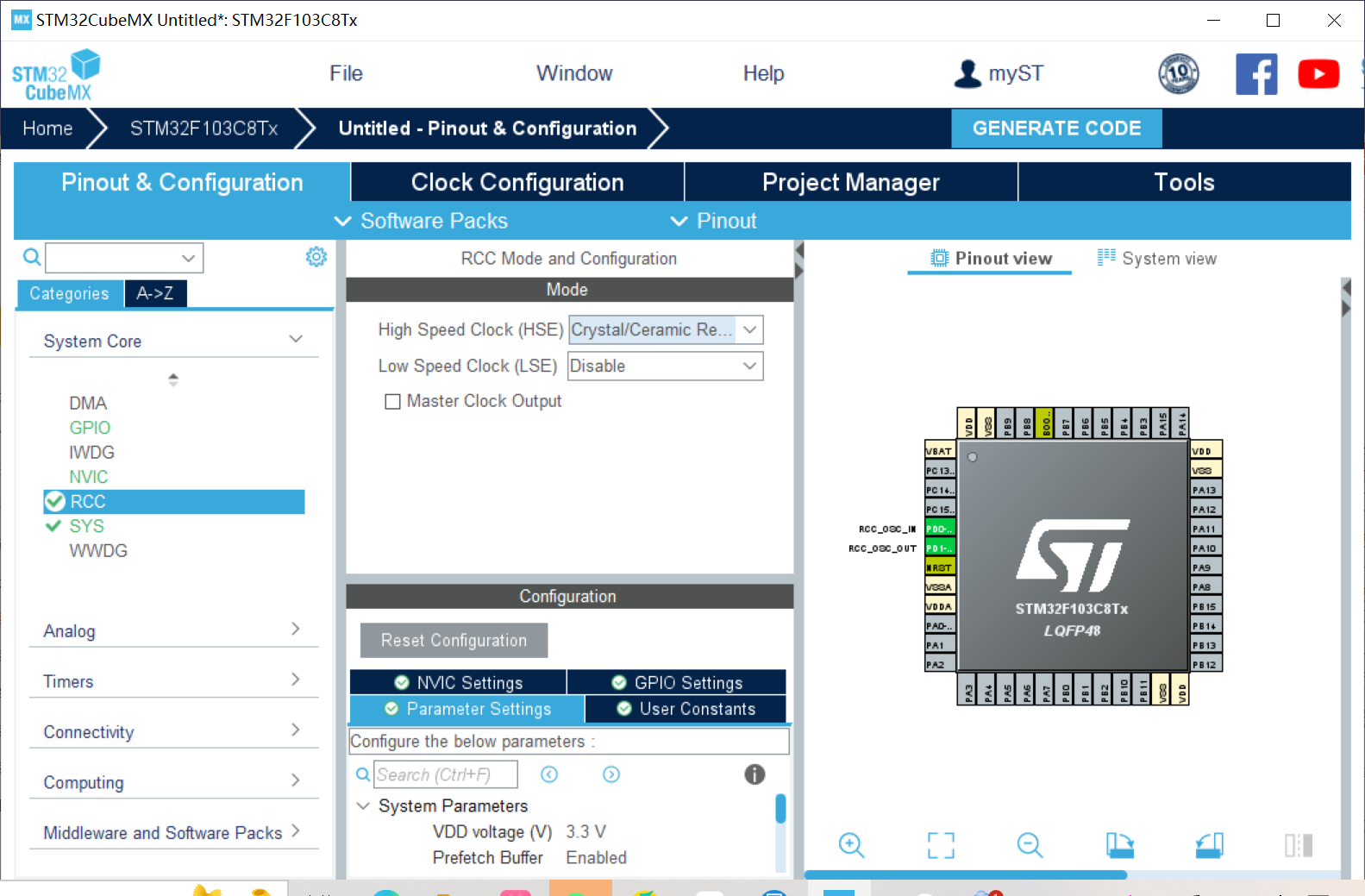
二、STM32cubx设置
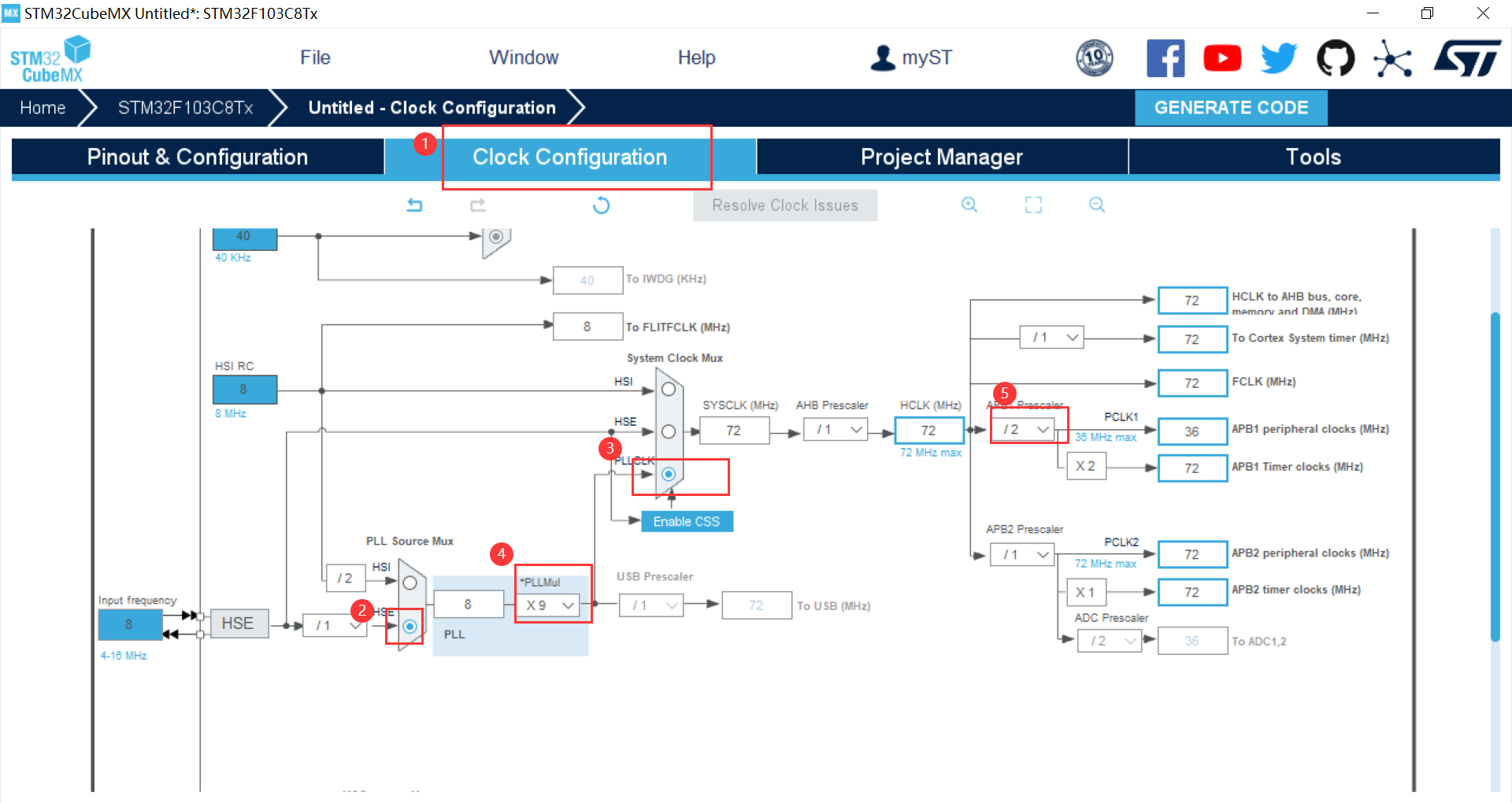
1.设置高速外部时钟
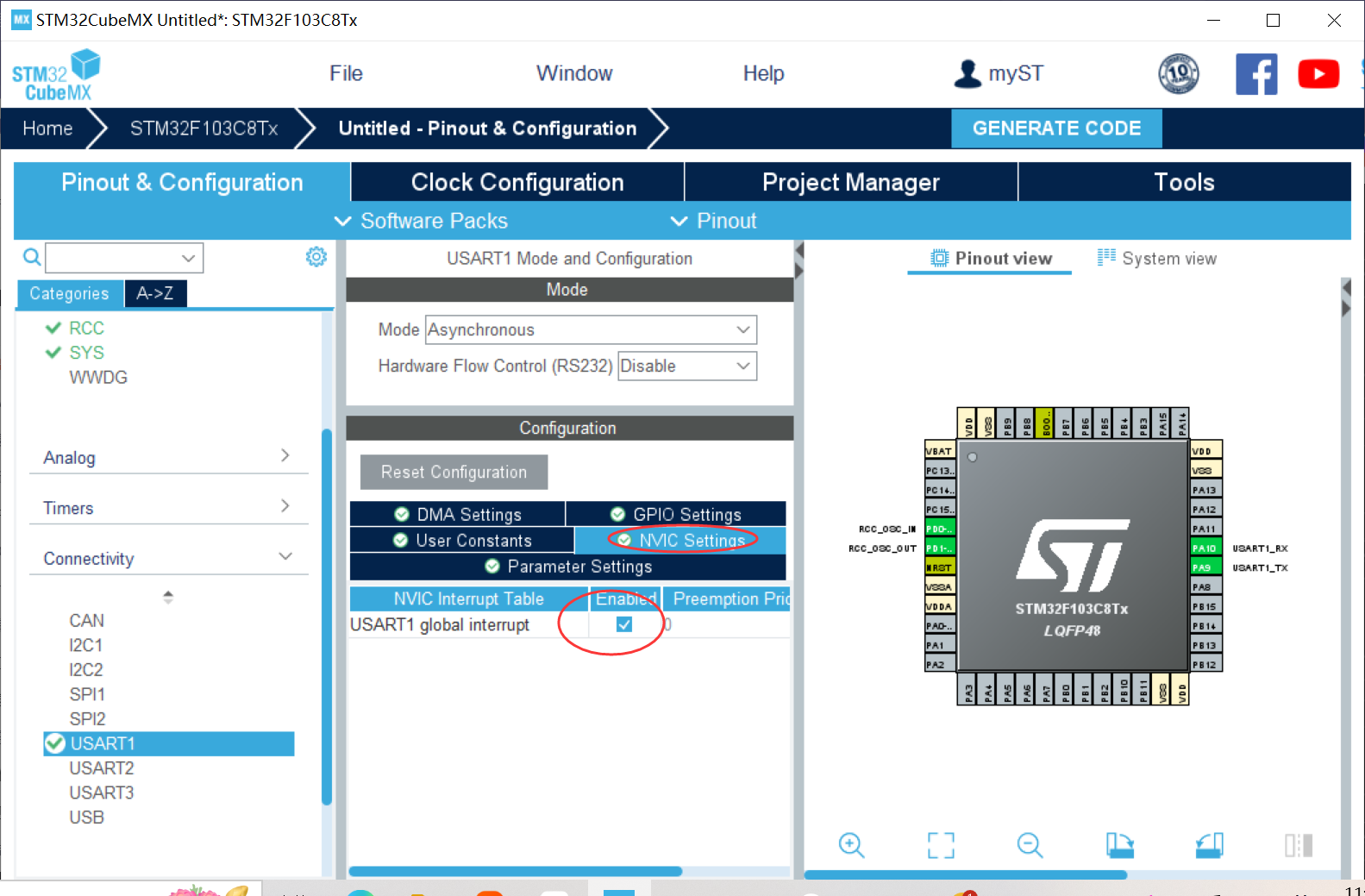
2.设置USART


3时钟设置
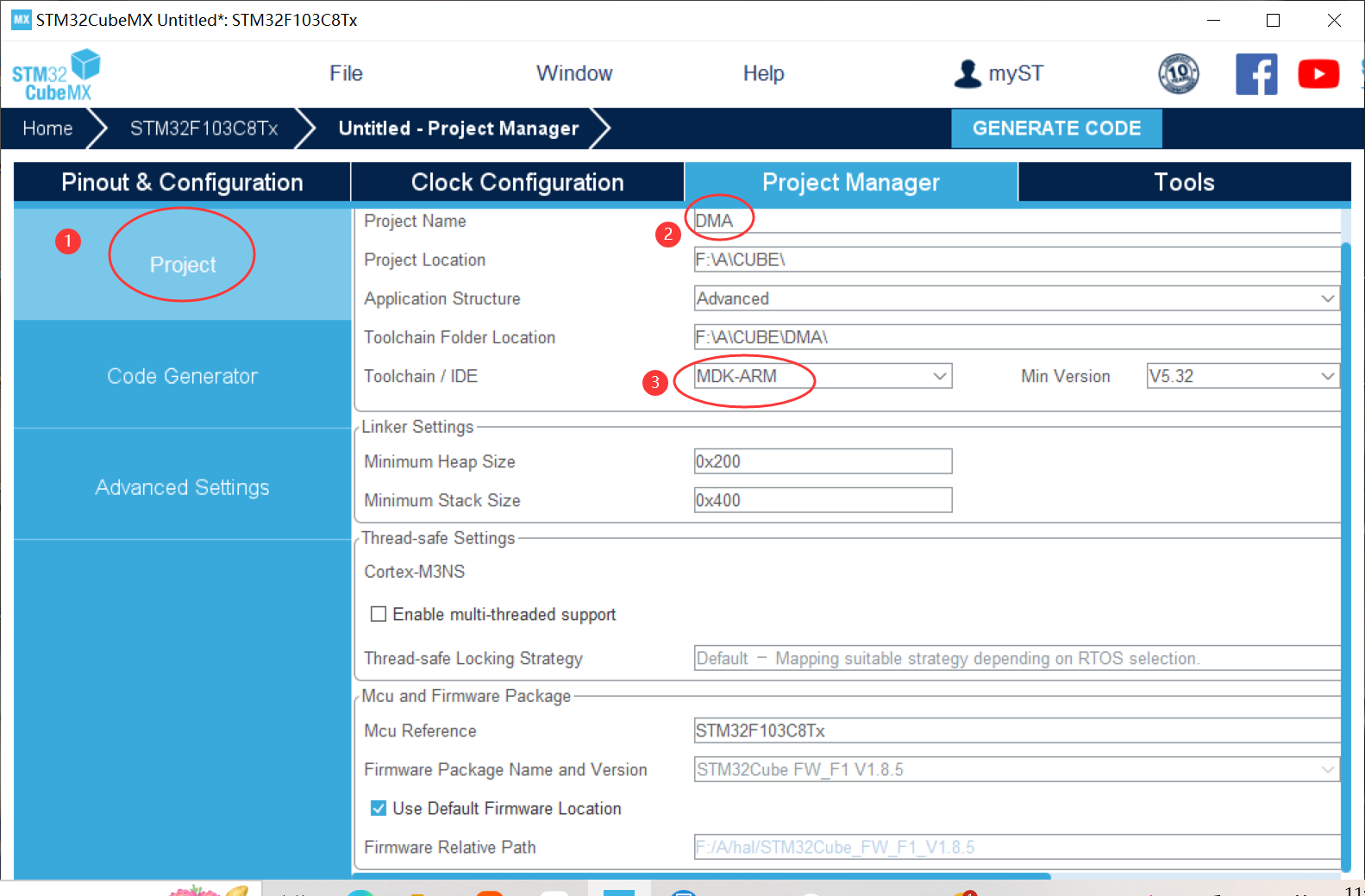
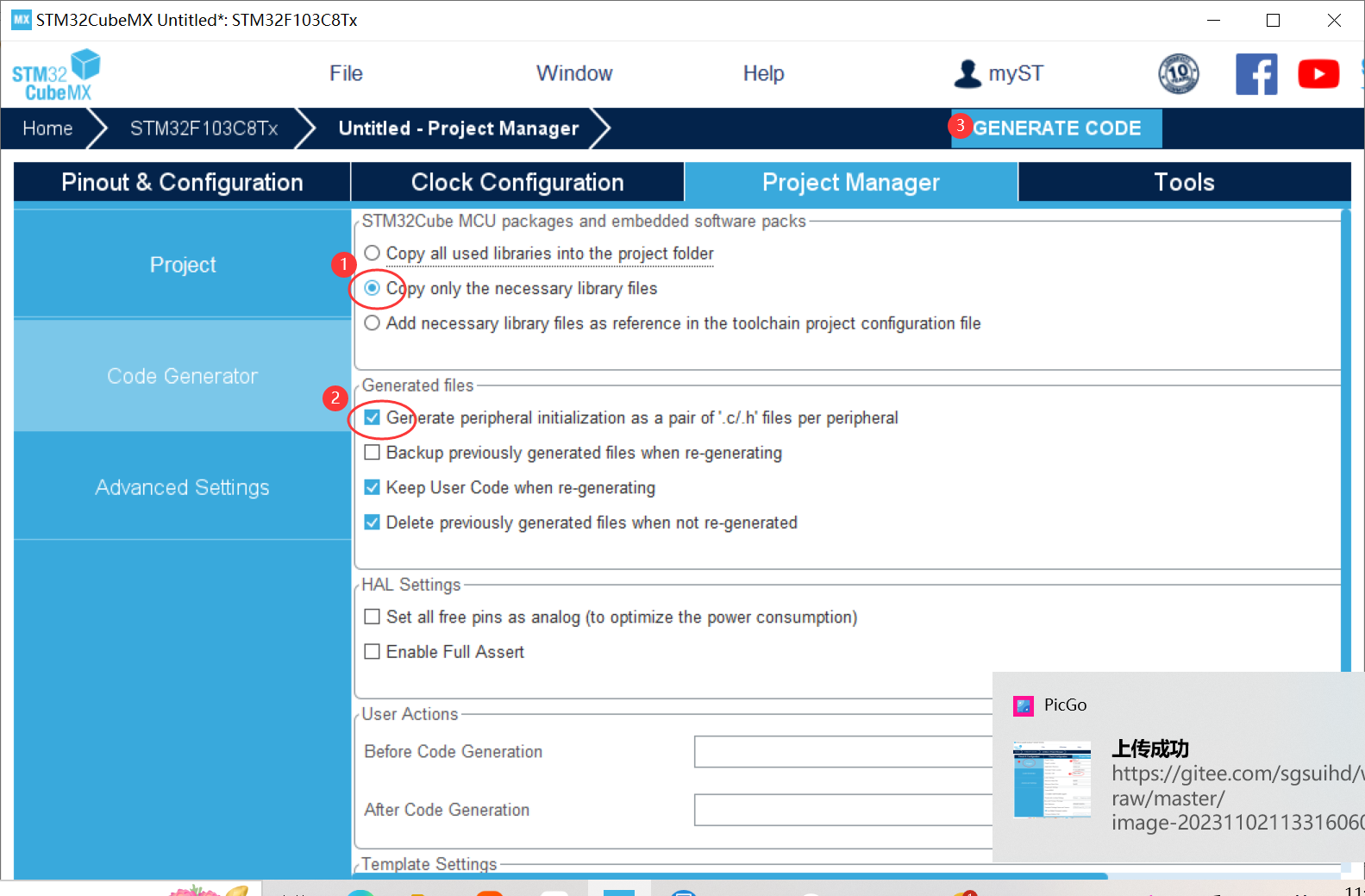
4创建工程
设置好项目名路径等
三、keil工程
(一)实现STM32系统给上位机(win10)连续发送“hello windows!”。win10采用“串口助手”工具接收。
1.写入代码
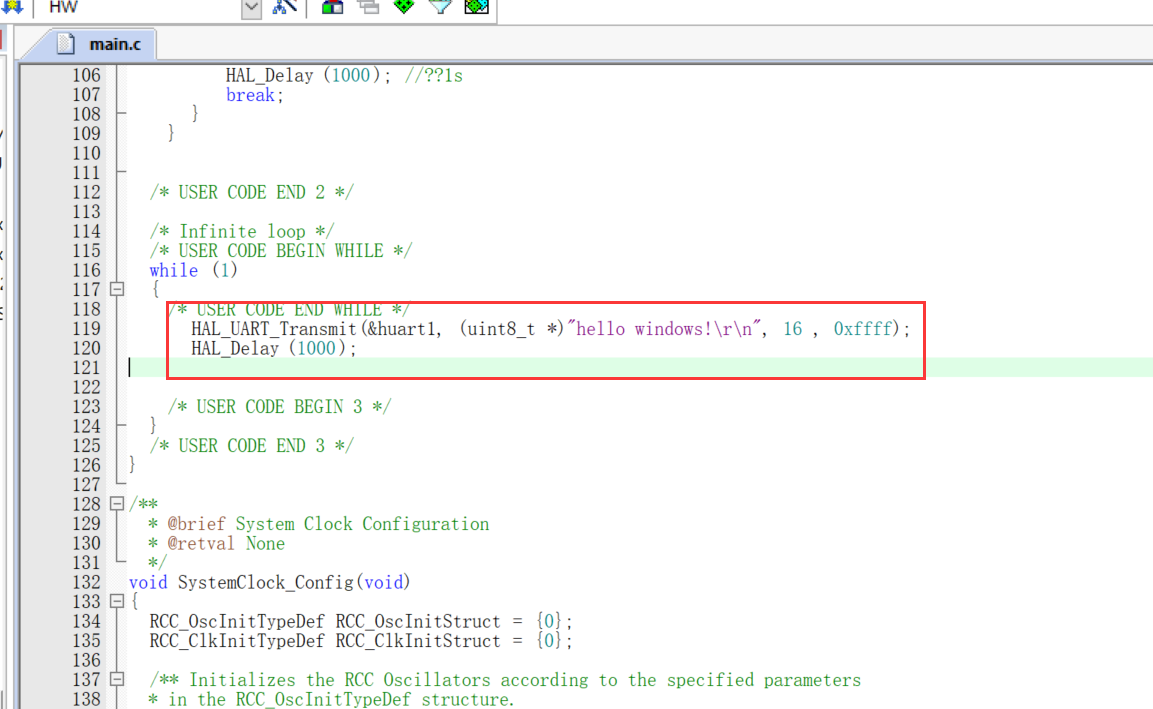
在主函数while循环中写入以下代码
HAL_UART_Transmit(&huart1, (uint8_t *)"hello windows!\r\n", 16 , 0xffff);
HAL_Delay(1000);
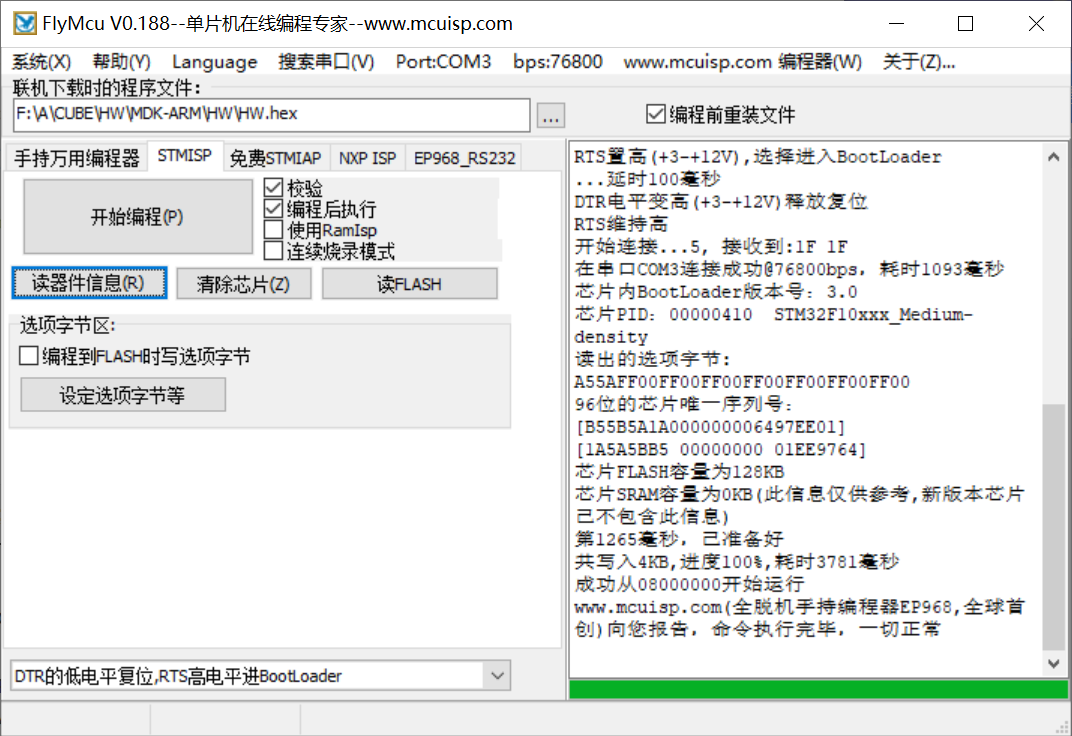
2.编译烧录
3.打开串口助手
注意stm32芯片跳帽设置为如图

打开串口助手,设置好串口、波特率、数据位、校验位、停止位等

打开串口效果为:

(二)当上位机给stm32发送一个字符“stop!”后,stm32暂停发送“hello windows!”;发送一个字符“start”后,stm32继续发送;
1.在主函数中写入下列代码
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "dma.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
/* USER CODE END 0 */
int strEqual(char rcData[6],char rcData2[6])//判断俩个数据是否完全相同
{
for(uint8_t i = 0 ; i < 6 ; i++){
if (rcData[i] != rcData2[i]) return 0;
}
return 1;
}
uint8_t flag=1;
char rx_buf[6];//接收串口数据存放的数组
uint8_t message[] = "hello windows!\r\n";
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_DMA_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
HAL_UART_Receive_DMA(&huart1,(uint8_t*)&rx_buf,5);//设置DMA接收到的数据存放在rx_buf中
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
if(flag==1){
HAL_UART_Transmit_DMA(&huart1, (uint8_t *)&message, sizeof(message));
HAL_Delay(600);
}
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
//当输入的指令为“stop!"时,发送提示并改变flag=0
if(strEqual(rx_buf,"stop!")==1)
{
flag=0;
}
//当输入的指令为"start"时,发送提示并改变flag=1
else if(strEqual(rx_buf,"start")==1)
{
flag=1;
}
HAL_UART_Receive_DMA(&huart1,(uint8_t*)rx_buf,5);
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
2.编译烧录

四、Keil的软件仿真逻辑分析仪
1.点击魔法棒设置debug

2.setup设置

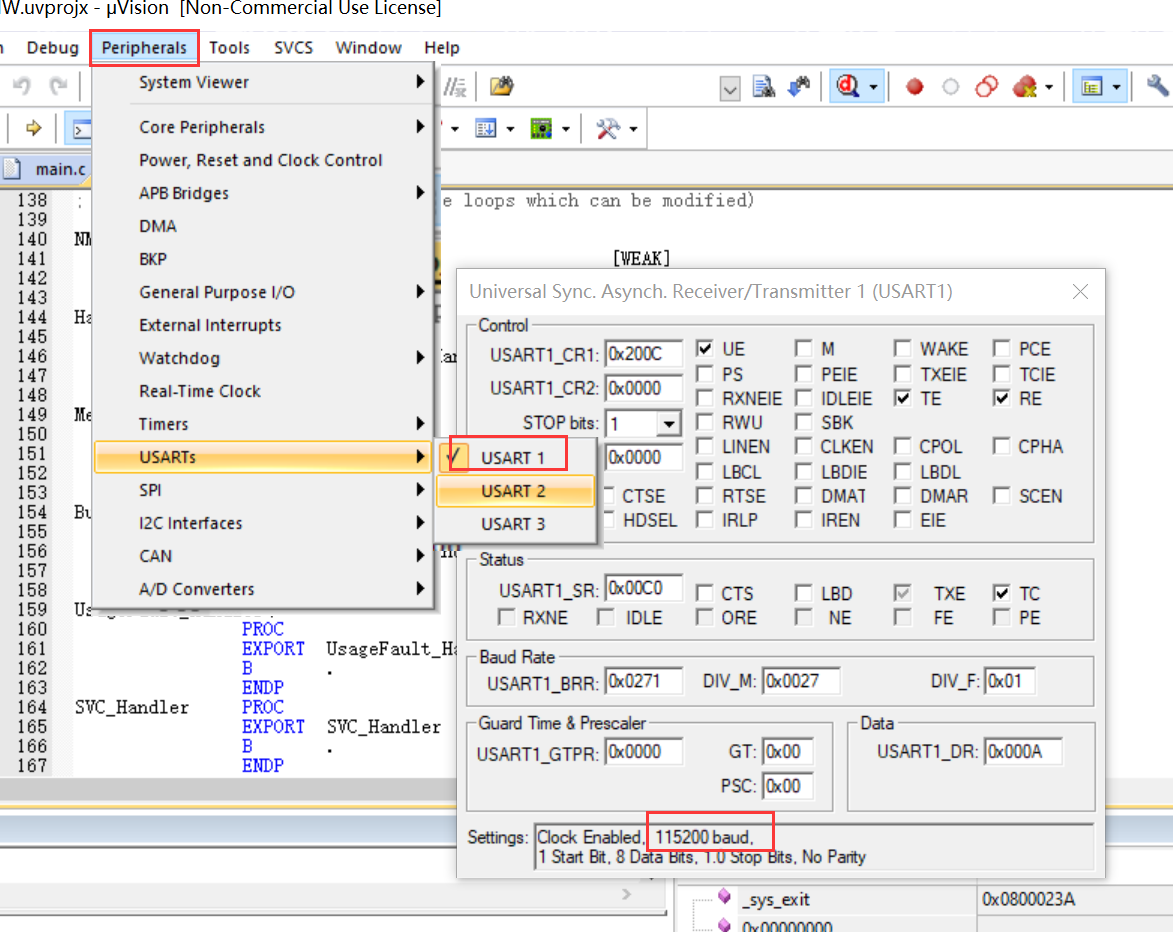
3.通过查看peripherals中的USART1可看到其波特率实际为115107baud















 389
389











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









