






一、创建功能包
cd catkin_ws #进入工作空间
catkin_create_pkg jubot_demo urdf xacro #创建功能包、添加依赖
cd jubot_demo/
mkdir urdf
mkdir launch
mkdir meshes #存放渲染机器人模型的文件
mkdir config #存放rviz配置的文件
二、urdf文件
<?xml version="1.0" ?>
<robot name="jubot">
<!--base_car-->>
<link name="base_link">
<visual>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
<geometry>
<cylinder radius="0.20" length="0.16"/>
</geometry>
<material name="yellow">
<color rgba="1 0.4 0 1"/>
</material>
</visual>
</link>
<!--left_wheel-->>
<joint name="left_wheel_joint" type="continuous">
<origin xyz="0.0 0.19 -0.05" rpy="0.0 0.0 0.0"/>
<parent link="base_link"/>
<child link="left_wheel_link"/>
<axis xyz="0.0 1.0 0.0"/>
</joint>
<link name="left_wheel_link">
<visual>
<origin xyz="0.0 0.0 0.0" rpy="1.5707 0.0 0.0"/>
<geometry>
<cylinder radius="0.06" length="0.025"/>
</geometry>
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
</visual>
</link>
<!--right_wheel-->>
<joint name="right_wheel_joint" type="continuous">
<origin xyz="0.0 -0.19 -0.05"/>
<parent link="base_link"/>
<child link="right_wheel_link"/>
<axis xyz="0.0 1.0 0.0"/>
</joint>
<link name="right_wheel_link">
<visual>
<origin xyz="0.0 0.0 0.0" rpy="1.5707 0.0 0.0"/>
<geometry>
<cylinder radius="0.06" length="0.025"/>
</geometry>
<material name="white">
<color rgba="1 1.0 1.0 0.9"/>
</material>
</visual>
</link>
<!--front_caster-->
<joint name="front_caster_joint" type="continuous">
<origin xyz="0.18 0.0 -0.095" rpy="0.0 0.0 0.0"/>
<parent link="base_link"/>
<child link="front_caster_link"/>
<axis xyz="0.0 1.0 0.0"/>
</joint>
<link name="front_caster_link">
<visual>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
<geometry>
<sphere radius="0.015"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.95"/>
</material>
</visual>
</link>
<!--back_caster-->
<joint name="back_caster_joint" type="continuous">
<origin xyz="-0.18 0.0 -0.095" rpy="0.0 0.0 0.0"/>
<parent link="base_link"/>
<child link="back_caster_link"/>
<axis xyz="0.0 1.0 0.0"/>
</joint>
<link name="back_caster_link">
<visual>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
<geometry>
<sphere radius="0.015"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.95"/>
</material>
</visual>
</link>
</robot>
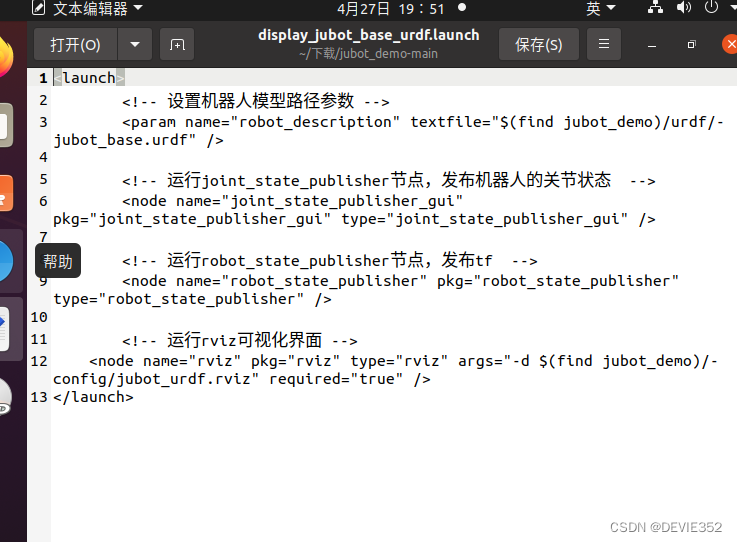
三、launch文件
<launch>
<!-- 设置机器人模型路径参数 -->
<param name="robot_description" textfile="$(find jubot_demo)/urdf/jubot_base.urdf" />
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher_gui" pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" />
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
<!-- 运行rviz可视化界面 -->
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find jubot_demo)/config/jubot_urdf.rviz" required="true" />
</launch>
四、图形化显示 安装语法工具
sudo apt-get install liburdfdom-tools
在urdf文件夹下打开终端检查语法
check_urdf jubot_base.urdf
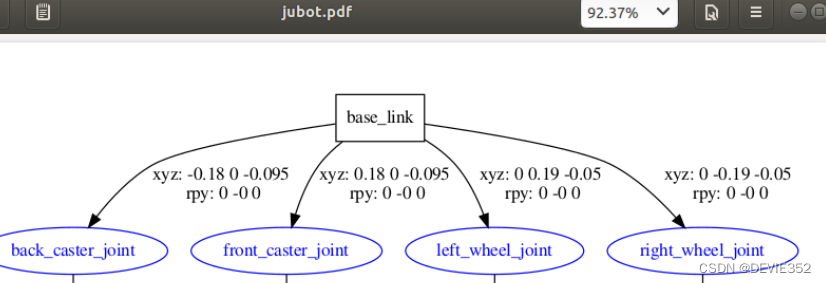
在urdf文件夹下打开终端,图形化显示URDF模型
urdf_to_graphiz jubot_base.urdf
五、RVIZ可视化
启动launch文件
roslaunch jubot_demo display_jubot_base_urdf.launch
启动rviz
rviz

六、再写一个urdf模型
依然是一个urdf文件和launch文件
跟上面的差不多,只是在参数上稍微做了修改,结构还是一个底座4个轮子
修改参数修改结构,就可以仿真出自己想要的小车模型
七、URDF文件转xacro文件,并加入控制插件
我们知道xacro文件是针对URDF模型产生的另一种精简版、可复用、模块化的描述形式。首先创建一个与urdf对应文件名的.xacro文件,我们在模型< robot>标签中加入xacro的声明:
<?xml version="1.0" encoding="utf-8"?>
<robot name="tianbot_mini_description" xmlns:xacro="http://www.ros.org/wiki/xacro">
添加传动装置
我们的机器人模型可看作一个两轮差速驱动的机器人,通过调节两个轮子的速度比例,完成前进、转向、倒退等动作。此时需要加入驱动机器人运动的动力源,为使用ROS控制驱动机器人,需要在模型中加入transmission元素,将传动装置与joint绑定。
<!-- Transmission is important to link the joints and the controller -->
<xacro:macro name="wheel" params="prefix reflect">
<transmission name="${prefix}_wheel_joint_trans">
<type>transmission_interface/SimpleTransmission</type>
<joint name="${prefix}_wheel_joint" >
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
</joint>
<actuator name="${prefix}_wheel_joint_motor">
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
</xacro:macro>
<wheel prefix="left" reflect="1"/>
<wheel prefix="right" reflect="-1"/>
添加gazebo控制器插件
我们直接加入gazebo提供的libgazebo_ros_diff_drive.so两轮差速插件,可以将其应用到现有的机器人模型上。
<!-- controller -->
<gazebo>
<plugin name="differential_drive_controller"
filename="libgazebo_ros_diff_drive.so">
<rosDebugLevel>Debug</rosDebugLevel>
<publishWheelTF>true</publishWheelTF>
<robotNamespace>/</robotNamespace>
<publishTf>1</publishTf>
<publishWheelJointState>true</publishWheelJointState>
<alwaysOn>true</alwaysOn>
<updateRate>100.0</updateRate>
<legacyMode>true</legacyMode>
<leftJoint>left_wheel_joint</leftJoint>
<rightJoint>right_wheel_joint</rightJoint>
<wheelSeparation>0.1</wheelSeparation>
<wheelDiameter>0.043</wheelDiameter>
<broadcastTF>1</broadcastTF>
<wheelTorque>30</wheelTorque>
<wheelAcceleration>1.8</wheelAcceleration>
<commandTopic>cmd_vel</commandTopic>
<odometryFrame>odom</odometryFrame>
<odometryTopic>odom</odometryTopic>
<robotBaseFrame>base_footprint</robotBaseFrame>
</plugin>
</gazebo>
注意leftJoint和rightJoint标签中间要输入自己机器人的左右jointname,wheelSeparation和wheelDiameter标签中间要输入自己机器人的轮间距和轮直径。
到现在xacro文件已经配置好了,我们可以看一看总的
<?xml version="1.0" encoding="utf-8"?>
<robot name="tianbot_mini_description" xmlns:xacro="http://www.ros.org/wiki/xacro">
<link
name="base_link">
<inertial>
<origin
xyz="0.025566 -0.0012293 0.024367"
rpy="0 0 0" />
<mass
value="0.15009" />
。
。
。
中间太长,我给删了
。
。
。
<joint
name="lidar_joint"
type="fixed">
<origin
xyz="0.028391 -0.0024308 0.066849"
rpy="0 0 0" />
<parent
link="base_link" />
<child
link="lidar_Link" />
<axis
xyz="0 0 0" />
</joint>
<gazebo reference="base_link">
<material>Gazebo/Red </material>
</gazebo>
<gazebo reference="right_wheel_link">
<material>Gazebo/Black </material>
</gazebo>
<gazebo reference="left_wheel_link">
<material>Gazebo/Black </material>
</gazebo>
<gazebo reference="caster_wheel_link">
<material>Gazebo/Blue </material>
</gazebo>
<!-- Transmission is important to link the joints and the controller -->
<xacro:macro name="wheel" params="prefix reflect">
<transmission name="${prefix}_wheel_joint_trans">
<type>transmission_interface/SimpleTransmission</type>
<joint name="${prefix}_wheel_joint" >
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
</joint>
<actuator name="${prefix}_wheel_joint_motor">
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
</xacro:macro>
<wheel prefix="left" reflect="1"/>
<wheel prefix="right" reflect="-1"/>
<!-- controller -->
<gazebo>
<plugin name="differential_drive_controller"
filename="libgazebo_ros_diff_drive.so">
<rosDebugLevel>Debug</rosDebugLevel>
<publishWheelTF>true</publishWheelTF>
<robotNamespace>tianbot_mini</robotNamespace>
<publishTf>1</publishTf>
<publishWheelJointState>true</publishWheelJointState>
<alwaysOn>true</alwaysOn>
<updateRate>100.0</updateRate>
<legacyMode>true</legacyMode>
<leftJoint>left_wheel_joint</leftJoint>
<rightJoint>right_wheel_joint</rightJoint>
<wheelSeparation>0.1</wheelSeparation>
<wheelDiameter>0.043</wheelDiameter>
<broadcastTF>1</broadcastTF>
<wheelTorque>30</wheelTorque>
<wheelAcceleration>1.8</wheelAcceleration>
<commandTopic>cmd_vel</commandTopic>
<odometryFrame>odom</odometryFrame>
<odometryTopic>odom</odometryTopic>
<robotBaseFrame>base_footprint</robotBaseFrame>
</plugin>
</gazebo>
</robot>
现在的xacro文件可以通过launch文件打开,并且用键盘控制节点进行小车的控制















 3631
3631

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









