






一、用自己的语言解释以下概念
1、局部感知、权值共享
局部感知:卷积神经网络中的每个神经元只关注输入数据的一小部分,即“局部感受野”。卷积神经网络中,每个卷积层都有多个卷积核,每个卷积核又都可以絮叨一种特定特征。每个卷积核在输入数据上滑动以进行卷积运算,从而提取输入数据中的局部特征。局部感知的方式使网络可以专注于局部特征而非全局信息,大大减少了模型需要学习的参数数量,降低了模型的复杂性。
权值共享:在传统的神经网络中,每个神经元都有自己独特的权重。但在卷积神经网络中,同一层中的每个卷积核都使用相同的权重,这种策略称为权值共享。这意味着整个网络中,同一个特征被重复学习了多次,每次都在不同的局部感受野中进行。权值共享让网络能够更有效地利用数据,降低了模型的参数数量,增强了模型的泛化能力。
2、池化(子采样、降采样、汇聚)。会带来哪些好处和坏处?
池化是一种降采样技术,也被称为子采样、降采样或汇聚。池化通常在卷积之后进行,它通过对卷积层的输出进行下采样,以减少下一层的输入大小,从而降低模型的计算复杂度。
好处:减少参数数量、提高泛化能力(池化可以有效地减少过拟合现象)、降低模型对噪声的敏感性
坏处:信息丢失(作为下采样技术,它会丢失一部分信息,从而可能导致模型的性能下降)、无法恢复原始输入(池化是不可逆的操作,因此无法从池化后的特征图恢复原始的输入图像)、可能引入平滑效应(池化操作可能导致相邻像素之间的信息丢失,使得模型在处理边缘信息时出现困难)
3、全卷积网络(课上讲的这个概念不准确,同学们查资料纠正一下)
全卷积网络(FCN)将传统CNN后面的全连接层换成了卷积层,由此网络的输出将是热力图而非类别;同时为解决卷积和池化导致的图像尺寸变小,它使用了上采样方式对图像尺寸进行恢复。FCN组成:全卷积部分(经典CNN网络)+反卷积部分(上采样)
特点:1.不含全连接层的全卷积网络,可适应任意尺寸输入。传统CNN输入数据时图象时,通常是高、长、通道方向上的3维形状,但在向全连接层输入时,需要将数据拉平为一维数据,正因全连接层会忽视形状,所以无法利用与形状相关的信息。而卷积层可以保持形状不变,当输入数据是图象时,卷积层会以3维数据的形式接收输入数据,并同样以3维数据的形式输出至下一层。
2.反卷积层增大图像尺寸,输出精细结果。采用反卷积层对最后一个卷积层的feature map进行上采样, 使它恢复到输入图像相同的尺寸,从而可以对每个像素都产生了一个预测, 同时保留了原始输入图像中的空间信息, 最后在上采样的特征图上进行逐像素分类。
最后逐个像素计算softmax分类的损失, 相当于每一个像素对应一个训练样本。下图是Longjon用于语义分割所采用的全卷积网络(FCN)的结构示意图:
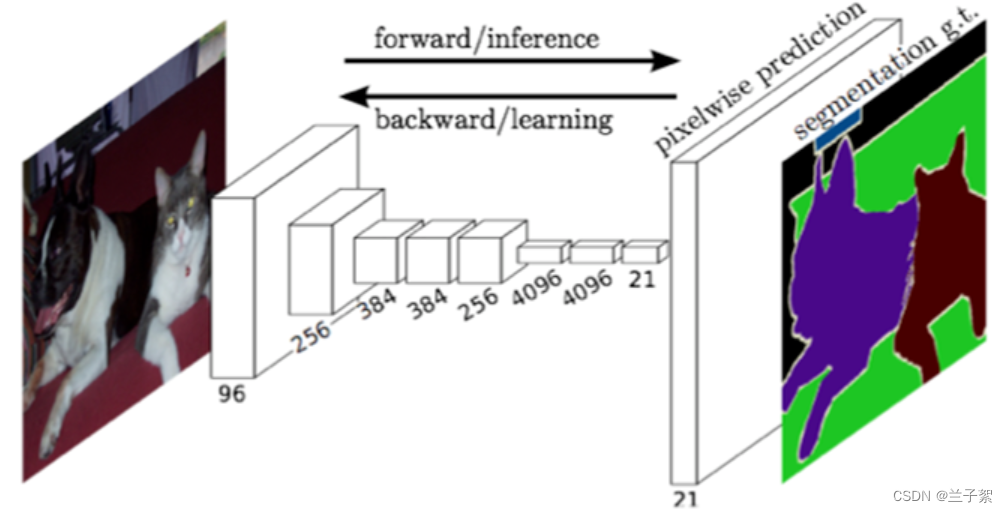
3.结合不同深度层结果的跳级结构,确保鲁棒性和精确性。
4、低级特征、中级特征、高级特征
低级特征通常指的是图像的基本元素,例如边缘、角点等。这些特征通常由图像处理算法提取,用于描述图像的基本属性。低级特征的优点是计算效率高,可以在短时间内处理大量图像数据。但是,低级特征缺乏对图像整体结构和语义信息的考虑,因此难以在复杂场景中取得良好的表现。
中级特征则是在低级特征的基础上,通过组合和融合,形成更加复杂的特征表达。这些特征通常包括局部区域内的纹理、颜色、形状等特征,可以更好地描述图像的局部信息。中级特征的优点是可以提供更丰富的信息,适用于更多的场景和任务。但是,中级特征的计算复杂度相对较高,需要更多的计算资源和时间。
高级特征则是指通过对图像的整体结构和语义信息的分析和理解,提取出的具有更高层次特征的表达。这些特征通常包括图像的主题、概念、场景等,可以更好地描述图像的整体信息和语义含义。高级特征的优点是可以提供更准确的图像理解和分类能力,适用于复杂的图像分类和识别任务。但是,高级特征的计算复杂度最高,需要更多的计算资源和时间。
5、多通道。N输入,M输出是如何实现的?
多通道输入意味着输入数据包含多个通道的信息。例如,在处理彩色图像时会使用RGB三个通道的数据,而灰度就只有一个通道。
在CNN中,多通道输入通过将多个卷积核应用到输入数据的不同通道上来实现。每个卷积核都从输入数据的一个特定通道中提取出一种特征。通过这种方式,我们可以同时从输入数据中提取出多种特征。
N输入和M输出是指CNN中有N个输入通道和M个输出通道。N输入通道接收来自不同源的数据,例如彩色图像的三个通道(R、G、B)。M输出通道则将CNN的输出传递给下一层或输出层。
多通道输出的实现方式与多通道输入类似。在CNN中,我们通常是使用多个卷积核来生成输出层的多个通道。每个卷积核都会根据输入数据的特征生成一个特定的输出通道。
6、1×1的卷积核有什么作用
1×1的卷积大概有两个方面的作用吧:1、实现跨通道的交互和信息整合;2、进行卷积核通道数的降维和升维
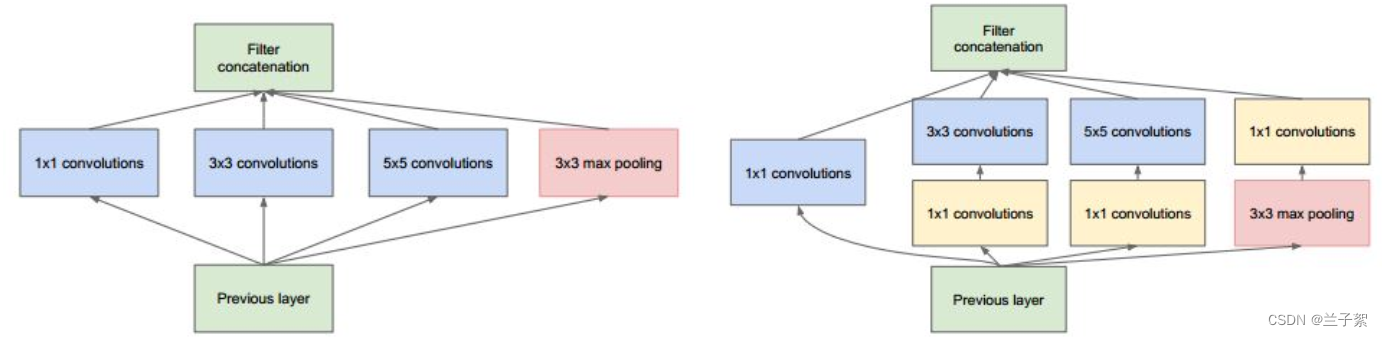
以GoogLeNet的3a模块为例,输入的feature map是28×28×192,3a模块中1×1卷积通道为64,3×3卷积通道为128,5×5卷积通道为32,如果是左图结构,那么卷积核参数为1×1×192×64+3×3×192×128+5×5×192×32,而右图对3×3和5×5卷积层前分别加入了通道数为96和16的1×1卷积层,这样卷积核参数就变成了1×1×192×64+(1×1×192×96+3×3×96×128)+(1×1×192×16+5×5×16×32),参数大约减少到原来的三分之一。
同时在并行pooling层后面加入1×1卷积层后也可以降低输出的feature map数量,左图pooling后feature map是不变的,再加卷积层得到的feature map,会使输出的feature map扩大到416,如果每个模块都这样,网络的输出会越来越大。而右图在pooling后面加了通道为32的1×1卷积,使得输出的feature map数降到了256。GoogLeNet利用1×1的卷积降维后,得到了更为紧凑的网络结构,虽然总共有22层,但是参数数量却只是8层的AlexNet的十二分之一。
二、使用CNN进行XO识别
1.复现参考资料中的代码
(1)数据集
文件夹train_data:放置训练集1700张图片,为850张X和850张O
文件夹test_data:放置测试集300张图片,为150张X和150张O
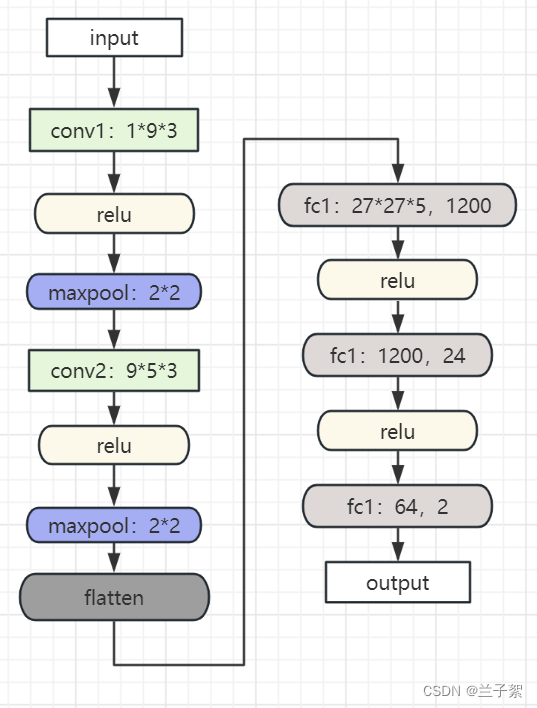
(2)模型构建:
class Net(nn.Module): # 卷积神经网络的整个过程,卷积神经网络函数
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(1, 9, 3) # in_channel , out_channel , kennel_size , stride
self.maxpool = nn.MaxPool2d(2, 2) # kernel_size,stride
self.conv2 = nn.Conv2d(9, 5, 3) # in_channel , out_channel , kennel_size , stride
self.relu = nn.ReLU()
self.fc1 = nn.Linear(27 * 27 * 5, 1200) # full connect 1
self.fc2 = nn.Linear(1200, 64) # full connect 2
self.fc3 = nn.Linear(64, 2) # full connect 3
def forward(self, x): # 进行最大池化和前馈神经网络的部分
x = self.maxpool(self.relu(self.conv1(x)))
x = self.maxpool(self.relu(self.conv2(x)))
x = x.view(-1, 27 * 27 * 5)
x = self.relu(self.fc1(x))
x = self.relu(self.fc2(x))
x = self.fc3(x)
return x(3)模型训练
model = Net()
criterion = torch.nn.CrossEntropyLoss() # 损失函数 交叉熵损失函数
optimizer = optim.SGD(model.parameters(), lr=0.1) # 优化函数:随机梯度下降
epochs = 10
for epoch in range(epochs):
running_loss = 0.0
for i, data in enumerate(data_loader):
images, label = data # 从数据加载器获取图像和标签数据
out = model(images)
loss = criterion(out, label) # 计算出损失
optimizer.zero_grad() # 清空梯度缓存
loss.backward() # 调用backward()函数实现反向传播
optimizer.step() # 更新模型参数
running_loss += loss.item()
if (i + 1) % 10 == 0: # 每10次训练进行一次输出
print('[%d %5d] loss: %.3f' % (epoch + 1, i + 1, running_loss / 100))
running_loss = 0.0 # 为计算下一轮10个batch的平均损失做准备
print('finished train')
# 保存模型 torch.save(model.state_dict(), model_path)
torch.save(model.state_dict(), 'model_name1.pth') # 保存的是模型, 不止是w和b权重值
# 读取模型
model = torch.load('model_name1.pth')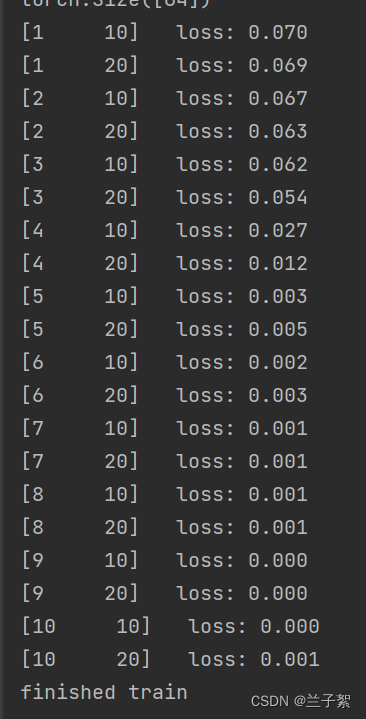
(4)模型测试
import matplotlib.pyplot as plt
# 读取模型
model_load = torch.load('model.pth')
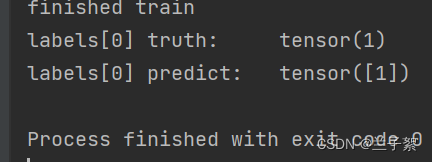
# 读取一张图片 images[0],测试
print("labels[0] truth:\t", labels[0])
x = images[0].unsqueeze(0)
predicted = torch.max(model_load(x), 1)
print("labels[0] predict:\t", predicted.indices)
img = images[0].data.squeeze().numpy() # 将输出转换为图片的格式
plt.imshow(img, cmap='gray')
plt.show()
(5)计算模型准确率
# 读取模型
model_load = torch.load('model.pth')
correct = 0
total = 0
with torch.no_grad(): # 进行评测的时候网络不更新梯度
for data in test_loader: # 读取测试集
images, labels = data
outputs = model_load(images)
_, predicted = torch.max(outputs.data, 1) # 取出 最大值的索引 作为 分类结果
total += labels.size(0) # labels 的长度
correct += (predicted == labels).sum().item() # 预测正确的数目
print('Accuracy of the network on the test images: %f %%' % (100. * correct / total))
2.重新设计网络结构
- 至少增加一个卷积层,卷积层达到三层以上
- 去掉池化层,对比“有无池化”的效果
- 修改“通道数”等超参数,观察变化
(1)增加一个卷积层,卷积层达到三层以上
class Net(nn.Module): # 卷积神经网络的整个过程,卷积神经网络函数
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(1, 9, 3) # in_channel , out_channel , kennel_size , stride
self.maxpool = nn.MaxPool2d(2, 2) # kernel_size,stride
self.conv2 = nn.Conv2d(9, 5, 3) # in_channel , out_channel , kennel_size , stride
self.conv3 = nn.Conv2d(5, 5, 3)
self.relu = nn.ReLU()
self.fc1 = nn.Linear(12 * 12 * 5, 480) # full connect 1
self.fc2 = nn.Linear(480, 320) # full connect 2
self.fc3 = nn.Linear(320, 2) # full connect 3
def forward(self, x): # 进行最大池化和前馈神经网络的部分
x = self.maxpool(self.relu(self.conv1(x)))
x = self.maxpool(self.relu(self.conv2(x)))
x = self.maxpool(self.relu(self.conv3(x)))
x = x.view(-1, 12 * 12 * 5)
x = self.relu(self.fc1(x))
x = self.relu(self.fc2(x))
x = self.fc3(x)
return x 
误差增大,准确率下降
(2)去掉池化层,对比“有无池化”的效果
class CNN(nn.Module): # 卷积神经网络的整个过程,卷积神经网络函数
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(1, 9, 3)
self.conv2 = nn.Conv2d(9, 5, 3)
self.relu = nn.ReLU()
self.fc1 = nn.Linear(12 * 12 * 5, 480) # full connect 1
self.fc2 = nn.Linear(480, 320) # full connect 2
self.fc3 = nn.Linear(320, 2) # full connect 3
def forward(self, x): # 进行最大池化和前馈神经网络的部分
x = self.relu(self.conv1(x))
x = self.relu(self.conv2(x))
x = x.view(-1, 12 * 12 * 5)
x = self.relu(self.fc1(x))
x = self.relu(self.fc2(x))
x = self.fc3(x)
return x
训练速度明显变慢,准确率下降
(3)修改“通道数”等参数,观察变化
通道数改为15:
class CNN(nn.Module):
def __init__(self):
super(CNN, self).__init__()
self.conv1 = nn.Conv2d(1, 15, 3)
self.pool = nn.MaxPool2d(2, 2)
self.conv2 = nn.Conv2d(15, 5, 3)
self.relu = nn.ReLU()
self.fc1 = nn.Linear(27 * 27 * 5, 1200)
self.fc2 = nn.Linear(1200, 64)
self.fc3 = nn.Linear(64, 2)
def forward(self, x):
x = self.pool(self.relu(self.conv1(x)))
x = self.pool(self.relu(self.conv2(x)))
x = x.view(-1, 27 * 27 * 5)
x = self.relu(self.fc1(x))
x = self.relu(self.fc2(x))
x = self.fc3(x)
return x

3.可视化
- 选择自己的最优模型
- 可视化部分卷积核和特征图
- 探索低级特征、中级特征、高级特征
(1)查看训练好的模型特征图
import torch.optim
from torch.utils.data import DataLoader
from torchvision import transforms, datasets
transforms = transforms.Compose([
transforms.ToTensor(), # 把图片进行归一化,并把数据转换成Tensor类型
transforms.Grayscale(1) # 把图片 转为灰度图
])
data_train = datasets.ImageFolder('train_data', transforms)
data_test = datasets.ImageFolder('test_data', transforms)
train_loader = DataLoader(data_train, batch_size=64, shuffle=True)
test_loader = DataLoader(data_test, batch_size=64, shuffle=True)
for i, data in enumerate(train_loader):
images, labels = data
print(images.shape)
print(labels.shape)
break
for i, data in enumerate(test_loader):
images, labels = data
print(images.shape)
print(labels.shape)
break
import torch.nn as nn
class CNN(nn.Module):
def __init__(self):
super(CNN, self).__init__()
self.conv1 = nn.Conv2d(1, 9, 3)
self.pool = nn.MaxPool2d(2, 2)
self.conv2 = nn.Conv2d(9, 5, 3)
self.relu = nn.ReLU()
self.fc1 = nn.Linear(27 * 27 * 5, 1200)
self.fc2 = nn.Linear(1200, 64)
self.fc3 = nn.Linear(64, 2)
def forward(self, x):
outputs = []
x = self.conv1(x)
outputs.append(x)
x = self.relu(x)
outputs.append(x)
x = self.pool(x)
outputs.append(x)
x = self.conv2(x)
x = self.relu(x)
x = self.pool(x)
x = x.view(-1, 27 * 27 * 5)
x = self.relu(self.fc1(x))
x = self.relu(self.fc2(x))
x = self.fc3(x)
return outputs
import matplotlib.pyplot as plt
import numpy as np
# 读取模型
model = torch.load('model.pth')
print(model)
x = images[0].unsqueeze(0)
# forward正向传播过程
out_put = model(x)
for feature_map in out_put:
# [N, C, H, W] -> [C, H, W] 维度变换
im = np.squeeze(feature_map.detach().numpy())
print(im.shape)
# [C, H, W] -> [H, W, C]
im = np.transpose(im, [1, 2, 0])
print(im.shape)
# show 9 feature maps
plt.figure()
for i in range(9):
ax = plt.subplot(3, 3, i + 1) # 参数意义:3:图片绘制行数,5:绘制图片列数,i+1:图的索引
# [H, W, C]
# 特征矩阵每一个channel对应的是一个二维的特征矩阵,就像灰度图像一样,channel=1
# plt.imshow(im[:, :, i])
plt.imshow(im[:, :, i], cmap='gray')
plt.show()
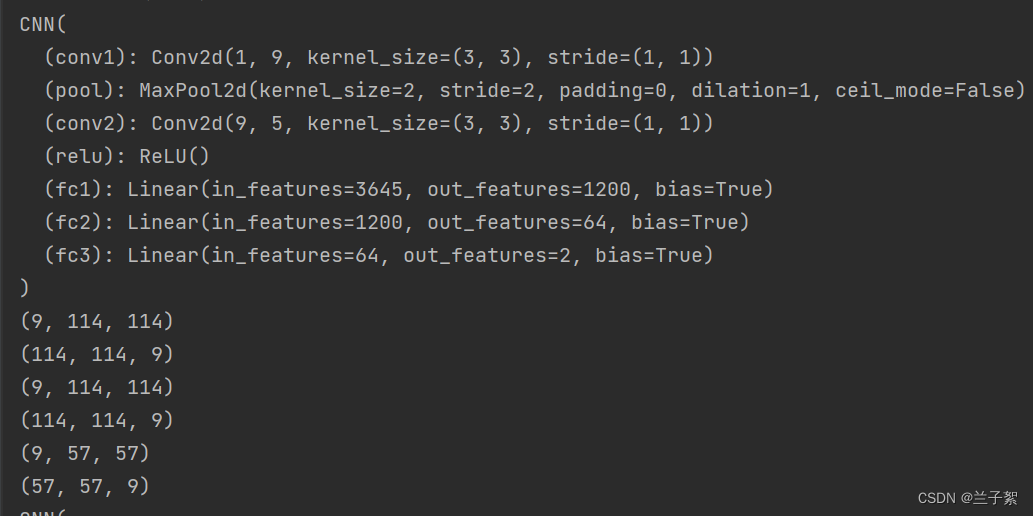
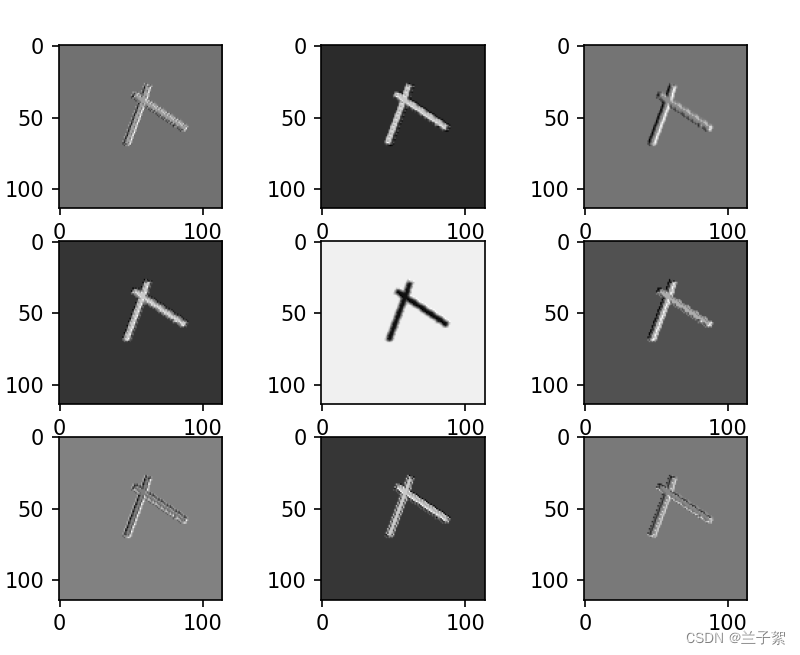
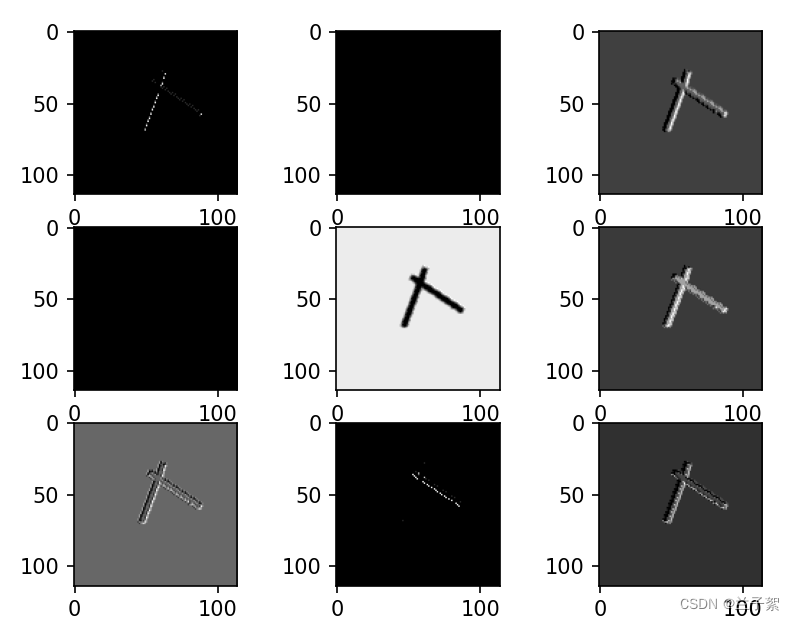
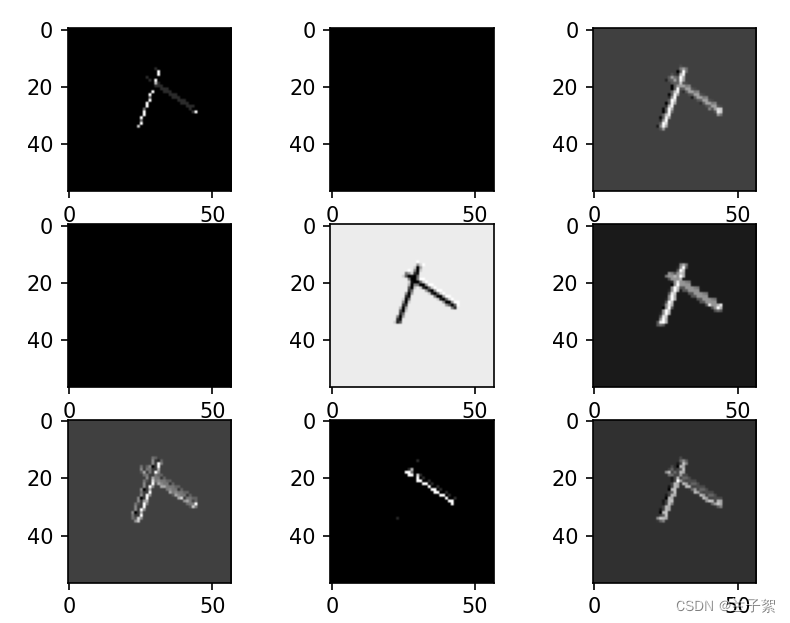
三个图分别是高级特征,中级特征和低级特征
(2)查看训练好的模型卷积核
import matplotlib.pyplot as plt
# 读取模型
model = torch.load('model.pth')
print(model)
x = images[0].unsqueeze(0)
# forward正向传播过程
out_put = model(x)
weights_keys = model.state_dict().keys()
for key in weights_keys:
print("key :", key)
# 卷积核通道排列顺序 [kernel_number, kernel_channel, kernel_height, kernel_width]
if key == "conv1.weight":
weight_t = model.state_dict()[key].numpy()
print("weight_t.shape", weight_t.shape)
k = weight_t[:, 0, :, :] # 获取第一个卷积核的信息参数
# show 9 kernel ,1 channel
plt.figure()
for i in range(9):
ax = plt.subplot(3, 3, i + 1) # 参数意义:3:图片绘制行数,5:绘制图片列数,i+1:图的索引
plt.imshow(k[i, :, :], cmap='gray')
title_name = 'kernel' + str(i) + ',channel1'
plt.title(title_name)
plt.show()
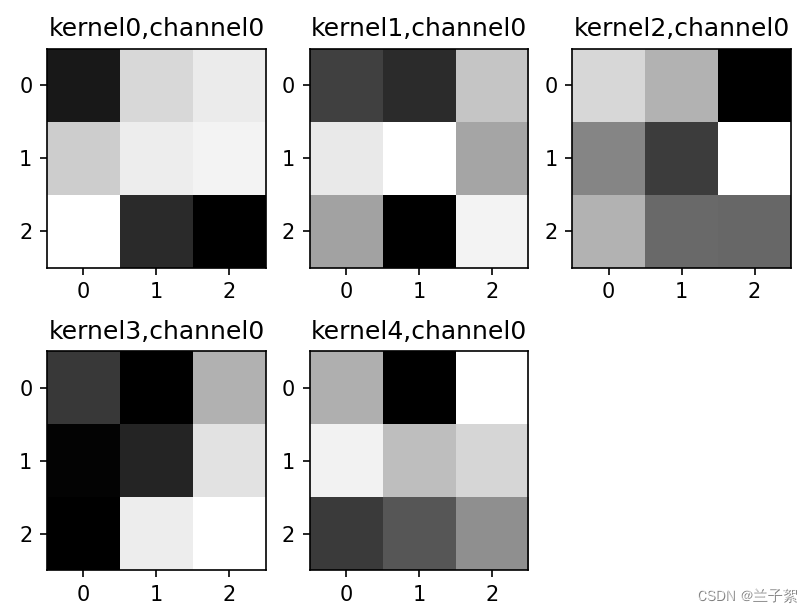
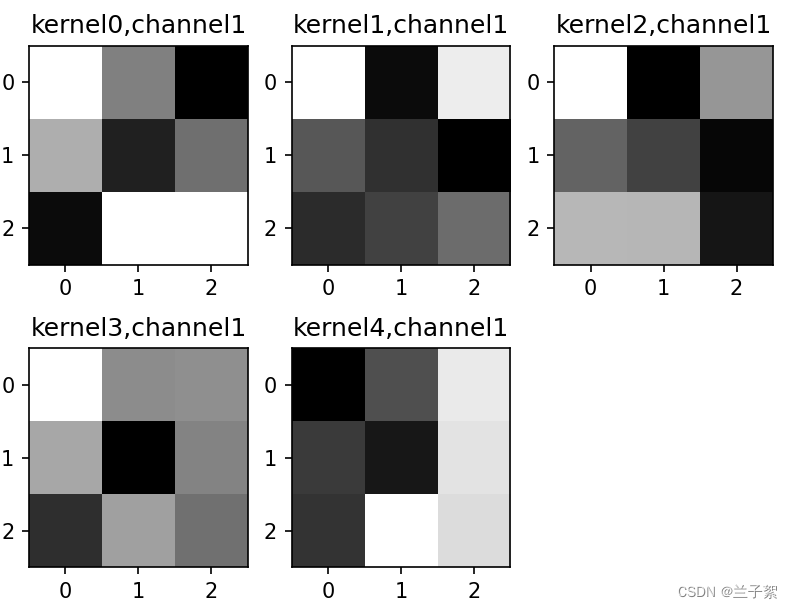
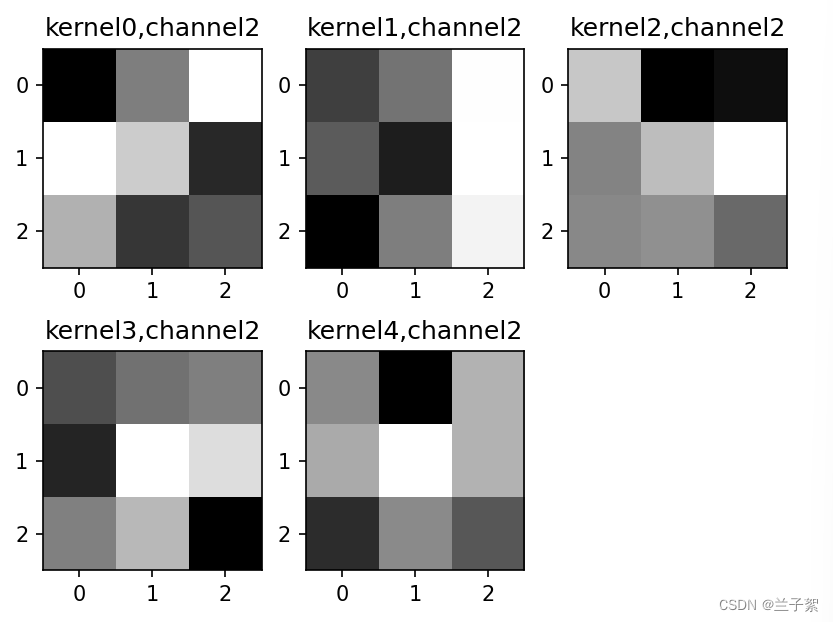
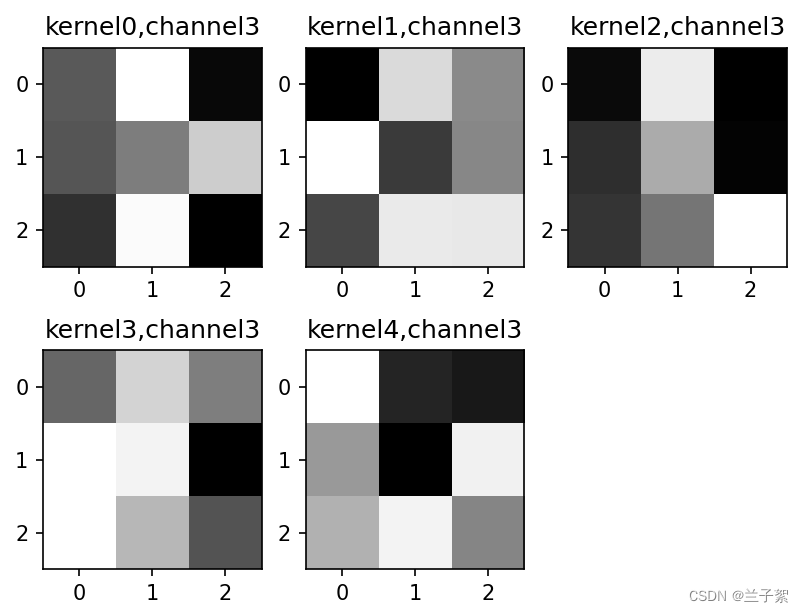
if key == "conv2.weight":
weight_t = model.state_dict()[key].numpy()
print("weight_t.shape", weight_t.shape)
k = weight_t[:, :, :, :] # 获取第一个卷积核的信息参数
print(k.shape)
print(k)
plt.figure()
for c in range(9):
channel = k[:, c, :, :]
for i in range(5):
ax = plt.subplot(2, 3, i + 1) # 参数意义:3:图片绘制行数,5:绘制图片列数,i+1:图的索引
plt.imshow(channel[i, :, :], cmap='gray')
title_name = 'kernel' + str(i) + ',channel' + str(c)
plt.title(title_name)
plt.show()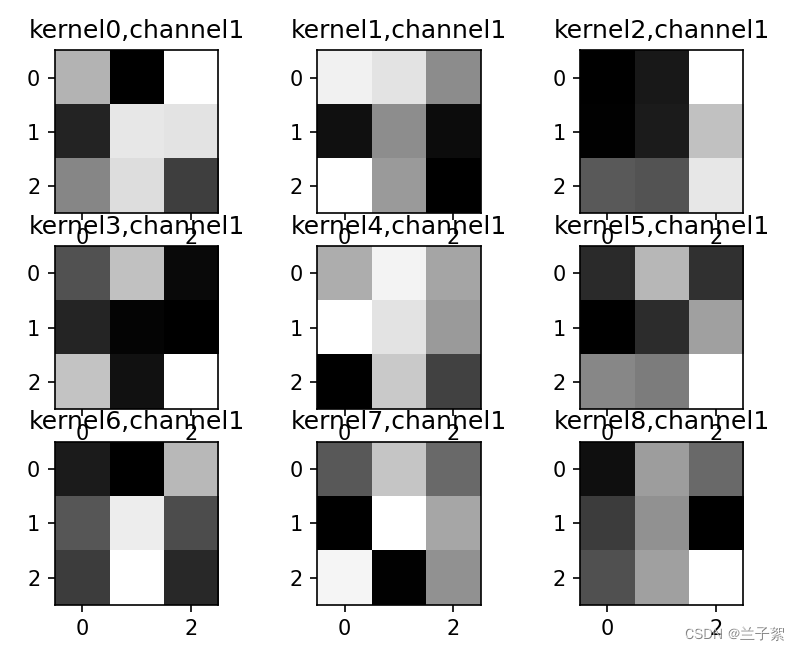
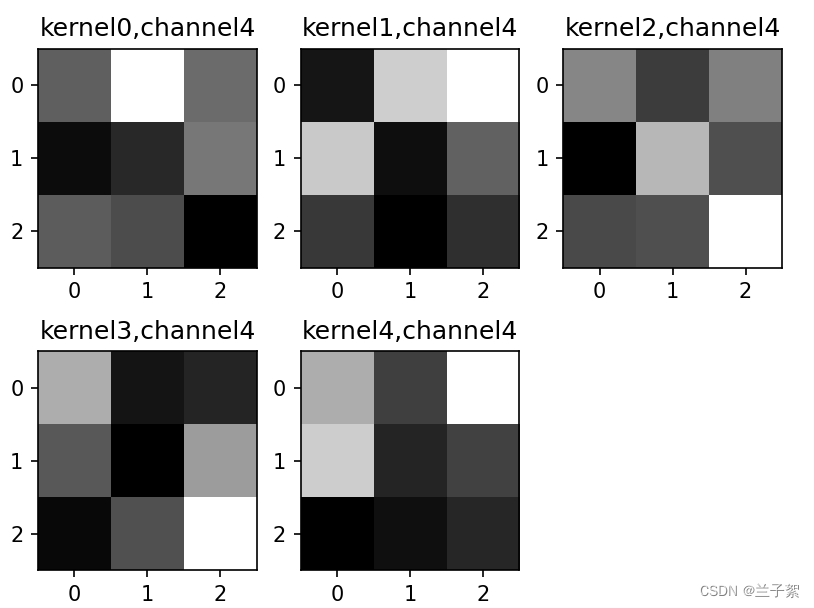
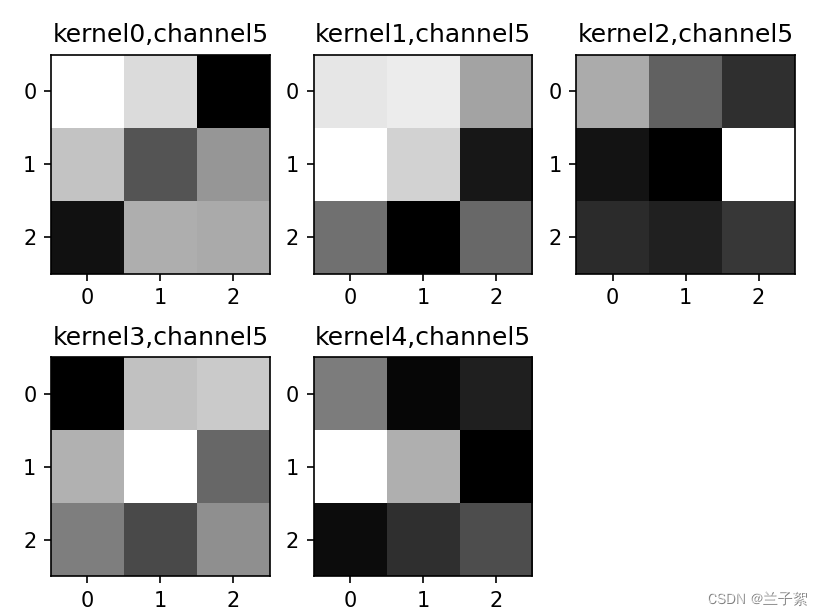
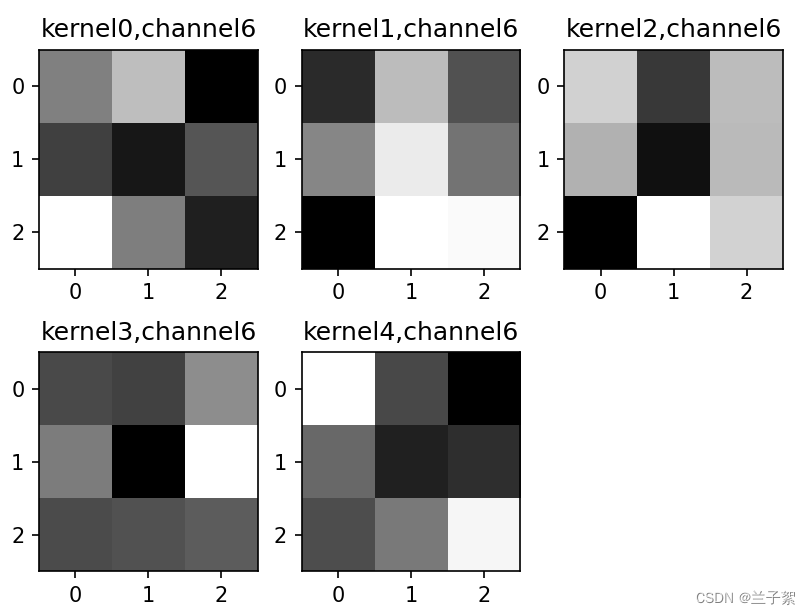
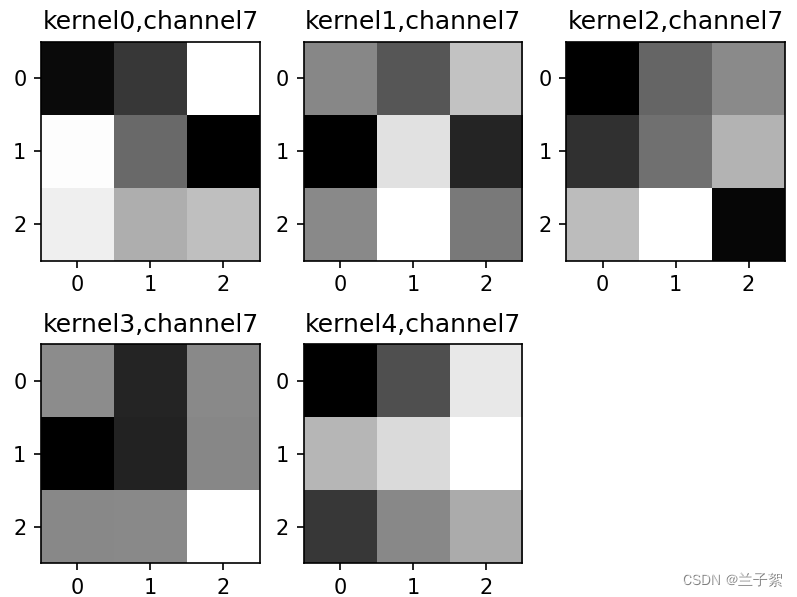
第一个特征图有九个输出,对应着第一层卷积层的输出是9
后面的特征图是五个输出,对应着第二层卷积层输出是5,一共九组,对应着第二层的输入是9,这里的9又与第一层卷积层相对应
参考:
全卷积网络 FCN 详解 - 代码学习者coding - 博客园 (cnblogs.com)
1*1卷积核的理解和作用 - 西野果子 - 博客园 (cnblogs.com)
【精选】NNDL 作业6:基于CNN的XO识别-CSDN博客
【2021-2022 春学期】人工智能-作业6:CNN实现XO识别_x = self.conv2(x)#请问经过conv2(x)之后,x的维度是多少-CSDN博客















 709
709











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









