






1.室外定位方案
(1)GPS方案
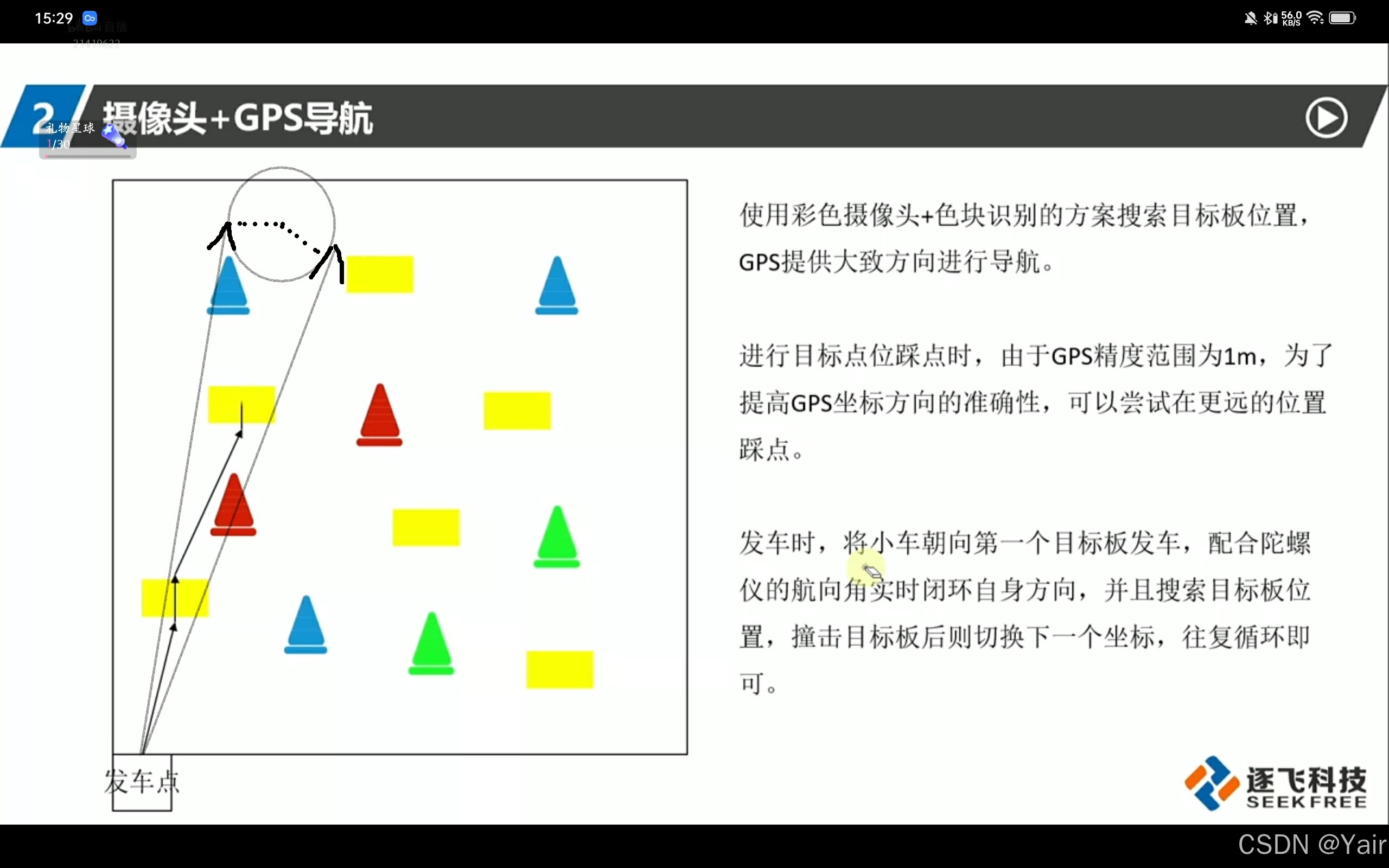
下面的思路引用自@逐飞科技,请大家参考。
(2)RTK方案
在室外,我们需要使用卫星定位模块来确定和记录目标板所在的位置。这里我们用的不是普通的GPS模块,因为它的精度只有1m左右,误差竟然达到了场地的1/5,因此我们选择了更高精度的RTK模块,其精度在3cm左右。
下面将简要介绍一下RTK定位设备的原理:
RTK(Real-Time Kinematic)定位技术的原理基于载波相位差分方法,主要由以下几个环节构成:
• 基准站定位:首先,基准站固定在一个已知坐标点上,接收来自GNSS卫星(如北斗等)的信号,并计算出自身的定位信息,如图所示,这个是基站,最好用直播支架撑高离地1m的距离。并且需要保证附近无干扰。

• 误差计算:基准站将观测到的误差(包括大气延迟、卫星钟差、接收机钟差等)计算出来,并结合自身的精确坐标,形成差分改正数据。

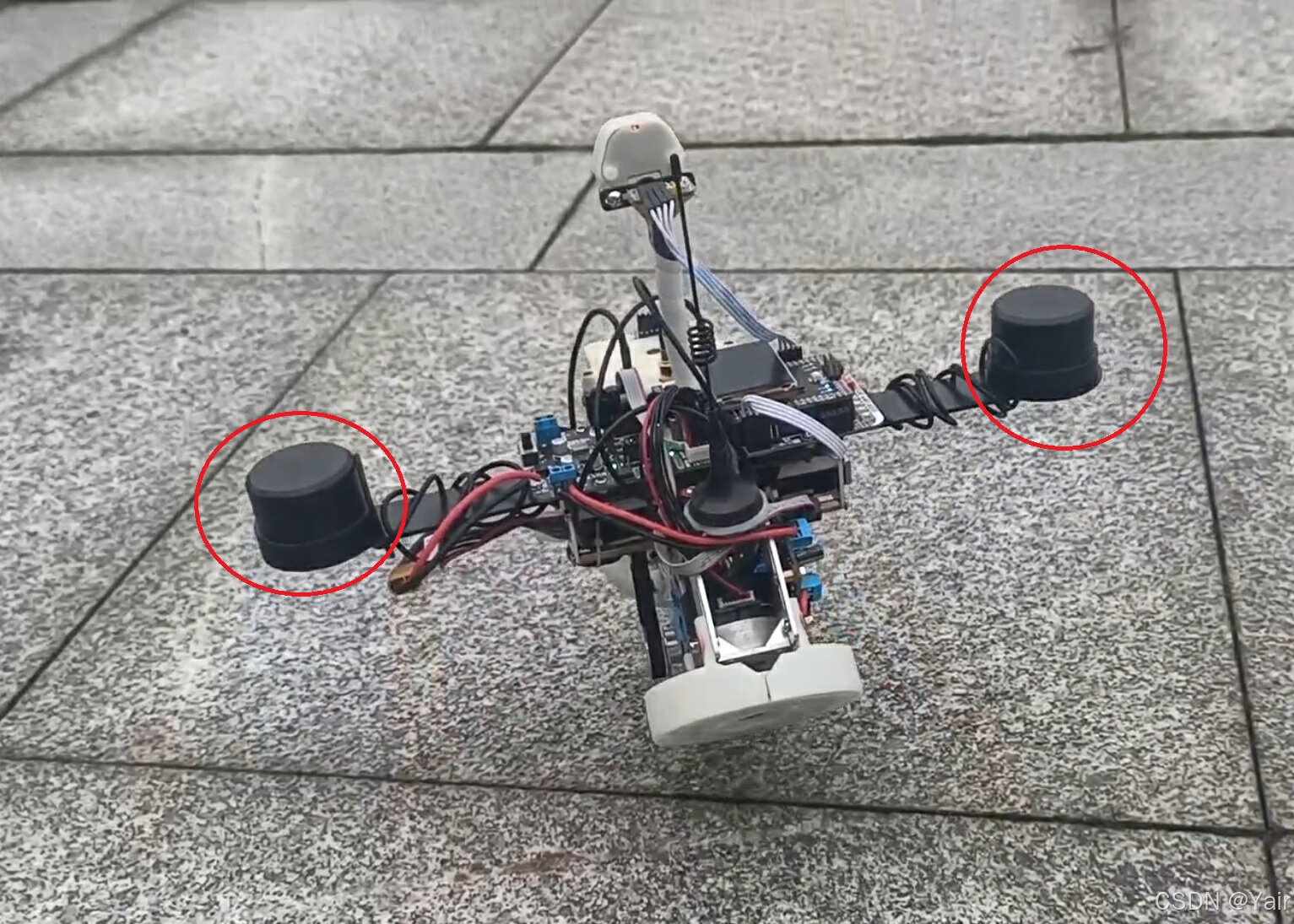
• 数据传输:基准站通过无线电数据链(或其他通信方式)实时将差分改正数据发送给流动站,此处的流动站是指车模上的两个圆柱形卫星接收器。

• 流动站定位:流动站接收到基准站发送的差分改正数据后,同时采集自身的GNSS观测数据。流动站利用这些数据,通过差分处理,消除或减少共同的误差源,从而提高定位精度。
• 实时解算:流动站根据差分改正数据和自身的观测数据,实时解算出自身的精确三维坐标(经度、纬度、高程)。由于流动站和基准站之间的空间相关性,流动站可以利用基准站的数据来校正自身的观测误差,实现厘米级的定位精度。
经由RTK解算芯片,最终得到了带相应格式的帧头文本,通过串口传递给主控芯片。
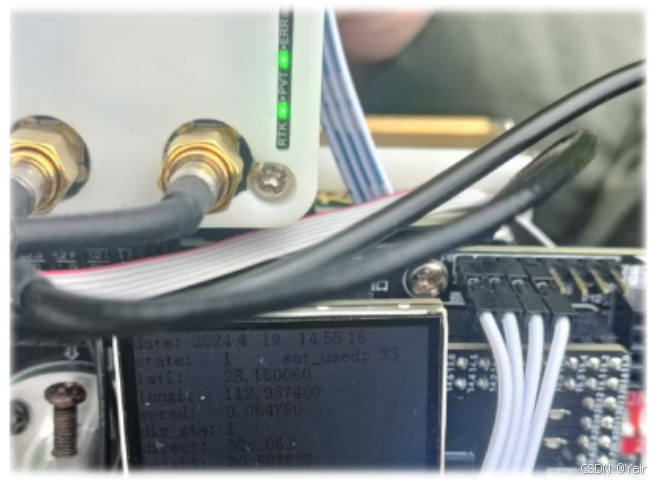
如图所示,逐飞的RTK需要等两个绿灯都亮起才算进入RTK高精度固定解算模式,此时表示定位信号良好。这样,通过逐飞的例程,就可以直接获取车体所在的经度、纬度、高度、移动速度。精度都在小数点后八位,即double型。
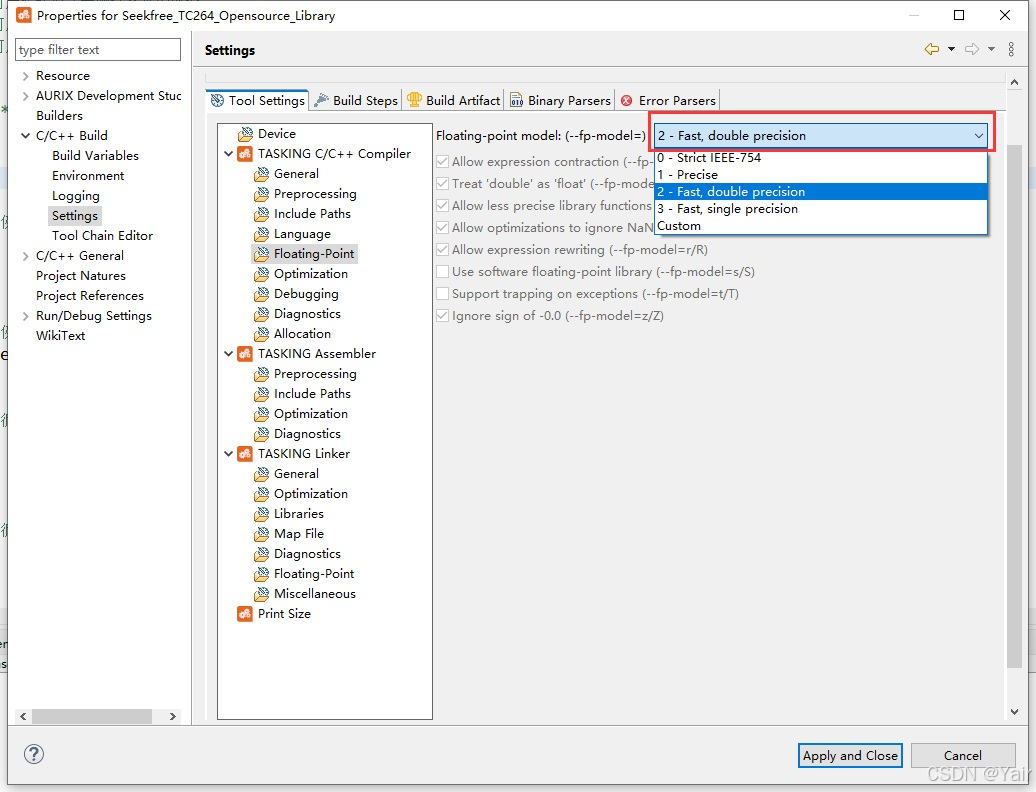
Aurix Development Studio默认将数据处理为float型,必须要注意的是,如果按默认方式处理,获得的经纬度信息就是截断在小数点后六位的,此时调用逐飞库函数里的——两点间的距离&两点间的角度,所得到的值是不连贯的,断断续续的,这正是因为因为精度不够。所以必须改为double型,那么该如何将数据处理改为double型呢?
请参考逐飞科技的博文——极速越野组之逐飞演示车模浅析
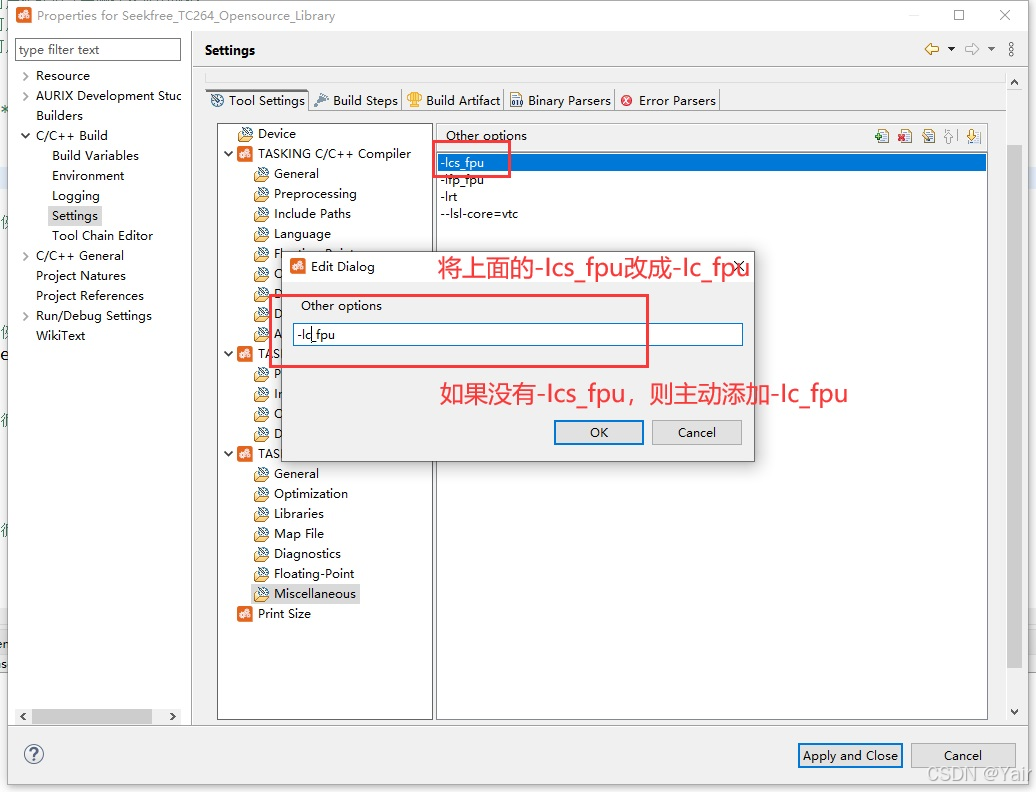
其中,下图这两步是最为关键的。如果不更改fpu设置,即浮点运算单元的设置,只改变double型,实际是得不到有用的效果的,反而可能使得车原本的平衡失效。需要注意的是,改成double数之后,所有原来的float型函数都需要加上后缀f才对,如tan需要改为tanf。此后不能再混用double型和float型。
那么为了实现定位,然后循迹撞击目标板,应该如何操作呢?
从目标板的分布情况来看,我们理想的循迹方式应该是通过卫星定位模块,从出发区开始,在目标板前后进行打点,再最终回到起点,并注意整条路线上规避锥桶或者凸起即可。基于上述构思,我们进行了程序设计。
首先是RTK信息解算,调用库函数每时每刻获取该位置的经纬度。然后把打点数据存在数组里,当然也可以存到Flash里,这个时候由于是double型数据,所以存到Flash里是需要点小技巧的。需要将整数位和小数位分开处理,分别存放,之后提取出来时才作合并,相信大家可以自己摸索出来。
那么接下来,如果要从这个坐标点走到下一个坐标点,只需要考虑如何让车身朝向对齐到下一个点,而无需考虑两点之间的距离(因为车始终处于前行状态)。
那么该如何获取两个点之间与地理北极方向所形成的夹角呢?
latitude1 = ANGLE_TO_RAD(latitude1);
latitude2 = ANGLE_TO_RAD(latitude2);
longitude1 = ANGLE_TO_RAD(longitude1);
longitude2 = ANGLE_TO_RAD(longitude2);
double x = sin(longitude2 - longitude1) * cos(latitude2);
double y = cos(latitude1) * sin(latitude2) - sin(latitude1) * cos(latitude2) * cos(longitude2 - longitude1);
double angle = RAD_TO_ANGLE(atan2(x, y));
return ((0 < angle) ? angle : (angle + 360));这个就是逐飞库里的get_two_points_azimuth函数,计算从第一个点到第二个点的方位角,以北极为参考正方向。这里采取的是一个Google Map实现的算法,可以很准确得到两点与北极之间的夹角。再次强调,必须把变量配置为double型变量进行运算,才能够得到准确的连续的值。
在知道了两点方位之后,我们还需要知道车头的朝向,这样才能求出需要转向的角度。这里可以采取两种方法实现。
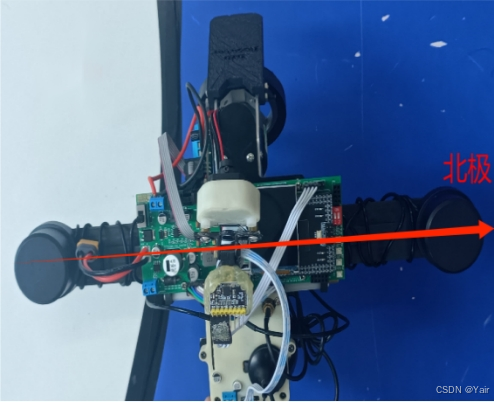
其一是通过北极角来换算,因为车模上的两个卫星接收站之间的连线是指向南北极的,如图,假设是从左到右指向北极,那么车头的方向就是北极角减去90°。当然也可能从右指到左为北,与接线有关。
其二是通过陀螺仪来计算偏航Yaw角,要么使用四元数法计算出Yaw角,要么通过积分法。两种方法都需要指定初始方向(最好是地理北极)作为参考方向。
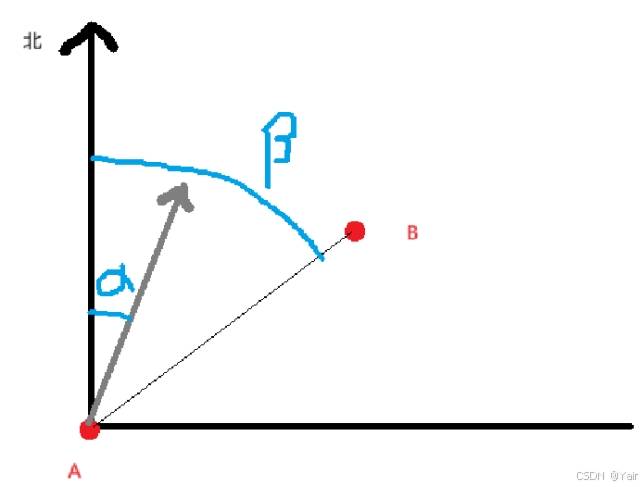
如图所示,车头和北极形成α的夹角,A到B点与北极方向形成β的夹角,那么应该转向的角度就可以知道为β-α,只需要让车模以这个实时变化的转角作为转向依据,将(β-α)作为转角丢进转向PID里形成所需要的飞轮差速即可实现转向,当然,这需要良好的PID参数。当到达下一个点附近几厘米后切点到下一坐标,然后再更新下一个转角即可。
除了用原始的经纬度这个方案,还可以把经纬度转换为RTK地心坐标系来处理,见CSDN博客:【经纬度和坐标之间怎么相互转换】经纬度和坐标之间怎么相互转换_坐标转换经纬度-CSDN博客
综上所述即为室外方案的寻点原理,它可以确保车模以较高的精度到达每个坐标点附近,由此实现循迹、撞击目标板和躲避障碍。
效果大致如下:
室外定位走S弯
室外定位走一圈
2.室内惯性导航方案
室内方案我们采取的是惯性导航技术。惯性导航(Inertial Navigation System, INS)是一种通过测量物体自身的加速度和旋转速度来推算其位置、速度和姿态的导航技术。惯性导航系统主要依赖惯性测量单元(IMU),其中包括加速度计和陀螺仪。加速度计用于测量物体在各个方向上的加速度。陀螺仪则用于测量物体的角速度,即物体在空间中的旋转运动。
通过对这些传感器数据进行积分,系统可以计算出物体的速度和位置。由于惯性导航不依赖于外部信号,它可以在没有GPS等外部参考的情况下工作,这使其在潜艇、航天器、导弹以及无人机等领域广泛应用。
不过,惯性导航系统存在累积误差(漂移),即由于测量误差和数值积分过程中的误差,随时间推移,计算出的位置信息会逐渐偏离实际位置。因此,惯性导航通常与其他导航系统(如GPS)结合使用,以校正这些误差。
那么回到具体的应用上来,该如何获取车模运行时的坐标信息呢?
通过每隔几毫秒读取一次陀螺仪的偏航角Yaw值和编码器测出的速度Speed值,对方向和位移的增量进行精确累加,即可获取车身当前坐标。参照如下伪代码:
Get_encoder();//20毫秒获取一次
Path = SystemData.Run_Speed * 0.020;
delta_X = Path * sin(posture.data.yaw);
delat_Y = Path * cos(posture.data.yaw);
X = X+delta_X;
Y = Y+delta_Y;这样就可以随时得到车身所在的坐标位置。
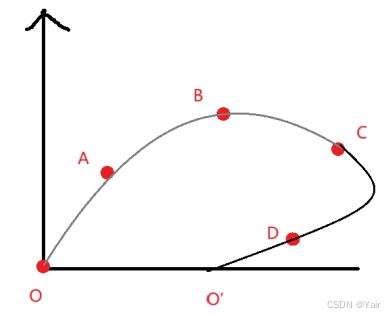
我们在比赛前校准陀螺仪的初始朝向,认定为0度角。然后用手推车,绕着目标板摆放的顺序推车一周,如图所示从点O出发,每经过一个目标板就采集一个坐标,最后推车回库,即沿着路径O->A->B->C->D->O’,就实现了所有目标坐标的采集,记忆下了全部的路径信息。当然由于室内也会有凸起,所以可以适当地规避凸起来踩点。并且对于角度太刁钻的目标板,也可以通过规划合适的路线来避免车身转向倾倒。
由于该方案是记忆下之前人为规划的路径,然后让车自主复现,这就像有惯性记忆那样,故称之为惯性导航。(修改:此处之前定义有误,惯性导航是机器人学里的重要概念,定义为一种不依赖外部信息,仅通过惯性传感单元的测算获取自身位置姿态的定位方式。也就是说,之前通过陀螺仪+编码器得到坐标和朝向的过程就是惯导,而后续的路径复现不属于此范畴。)
那么如何根据坐标信息进行转向呢?编写函数计算两点之间与初始指定方向之间的夹角,然后用这个角度减去当前车身的偏航Yaw角即可。例如假设车辆运行在从O点到A点这段,距离坐标点A还有几厘米时,认为已经抵达,切换到新的目标坐标位置B点去。此时转向所用的角度即为Yaw角到B方向的角度差。之后以此类推。
与此同时,也可以实时计算车模当前所在位置与下一个目标点的距离,进而控制变速决策。
综上所述即为室内方案的寻点原理,它可以确保车模以较高的准确度到达每个坐标点附近,由此实现循迹、撞击目标板和躲避障碍。只要平衡性足够稳当,且对转向饱和问题处理得到位,就可以保证完赛。
当然,有时候我们发现,如果打点过多,往往越到后面越走不到对应的位点,这是什么原因呢?此时就要了解到误差因素:包括陀螺仪车头前倾而使得Yaw偏离Z轴积分方向、陀螺仪温漂等。
务必注意,发车前初始0°方向的校准非常重要。可以在发车区用胶带做个物理标记。如果要原地倒伏救援,一般也需要原地快速扶起来之后,对齐初始方向将陀螺仪Yaw角置为0°,再重新调整方向面向下一个目标板。因为倒地后Yaw角会歪。
最后,不论室外方案还是室内方案,车体实现拐弯,都是靠飞轮的差速。如何调出最优的PID参数,使得转弯快速进行,且车体不会因为飞轮饱和而倒地,是需要仔细摸索的。
**********************转向环中间环******************************
//纯RTK,没找到目标板的时候用RTK自己的转向参数
if(SystemData.Controller == RTK)
{{Yaw_a = PID_Calculate(&RTK_DT.PID, RTK_DT.expect_yaw.theta, 0);} }
//纯惯导,没找到目标板的时候用专属的惯导参数
if(SystemData.Controller == Navigation)//调用转向优化函数,将角度进行切片,但显示的是实际的角度偏差
{Yaw_a = PID_Calculate(&NavigationDT.PID, NavigationDT.turn_angle, 0);}
//RTK或惯导,且找到目标板的时候,可以用视觉偏差加以修正
if(SystemData.Controller == Navigation_Camera || SystemData.Controller == RTK_Camera)
{Yaw_a = PID_Calculate(&Balance_Yaw.a, (float)SystemData.Visual_Offset, 0);}
**********************转向环 内环******************************
Yaw_w = PID_Calculate(&Balance_Yaw.w, Yaw_a-((float)posture.data.gyro_origin.z), 0);
**********************飞轮差速转向******************************
SystemData.Motor_A = (int)(Roll_w+Yaw_w);
SystemData.Motor_B =-(int)(Roll_w-Yaw_w);效果大致如下:

惯导走一圈
惯导优化的小技巧:
(1)采用变速策略。在距离下一个点几十厘米时开始减速,经过该点十几厘米之后再重新加速。
(2)切点时压弯。当在目标点5cm附近判定为“即将切点”,车身进入压弯状态转向。当经过该点几厘米后,再退出压弯状态走正走直。
(3)软硬约束兼顾。硬约束是指切点时要在某坐标点附近几厘米。软约束是指,当走了一定距离之后即可切点。有时候我们可以先记录下当前点到下一点的距离,然后放缩个1.2~1.5倍,假如车子经过下一坐标而未顺利切点,有软约束的辅助作用,就可以保证正常切点成功。但是这会让往后的行驶误差逐渐变大。
(4)Yaw实在不准的话建议采用九轴陀螺仪保证准确性。
(5)切点时长痛不如短痛,让车身尽快打角对齐到下一个坐标的方向是成功的关键。
以上就是19届独轮定位和寻迹方案的分享。后续可能还会有一些其他补充,敬请关注!


















 3640
3640

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











