









ubuntu系统中的pycharm中目前集成的ros2相关第三方库不多,需要进行配置,以下为配置方法:
1. 首先确保ubuntu系统中已经安装ROS2
2. Pycahrm中配置rclpy包
2.1 进入pycahrm中的设置settings
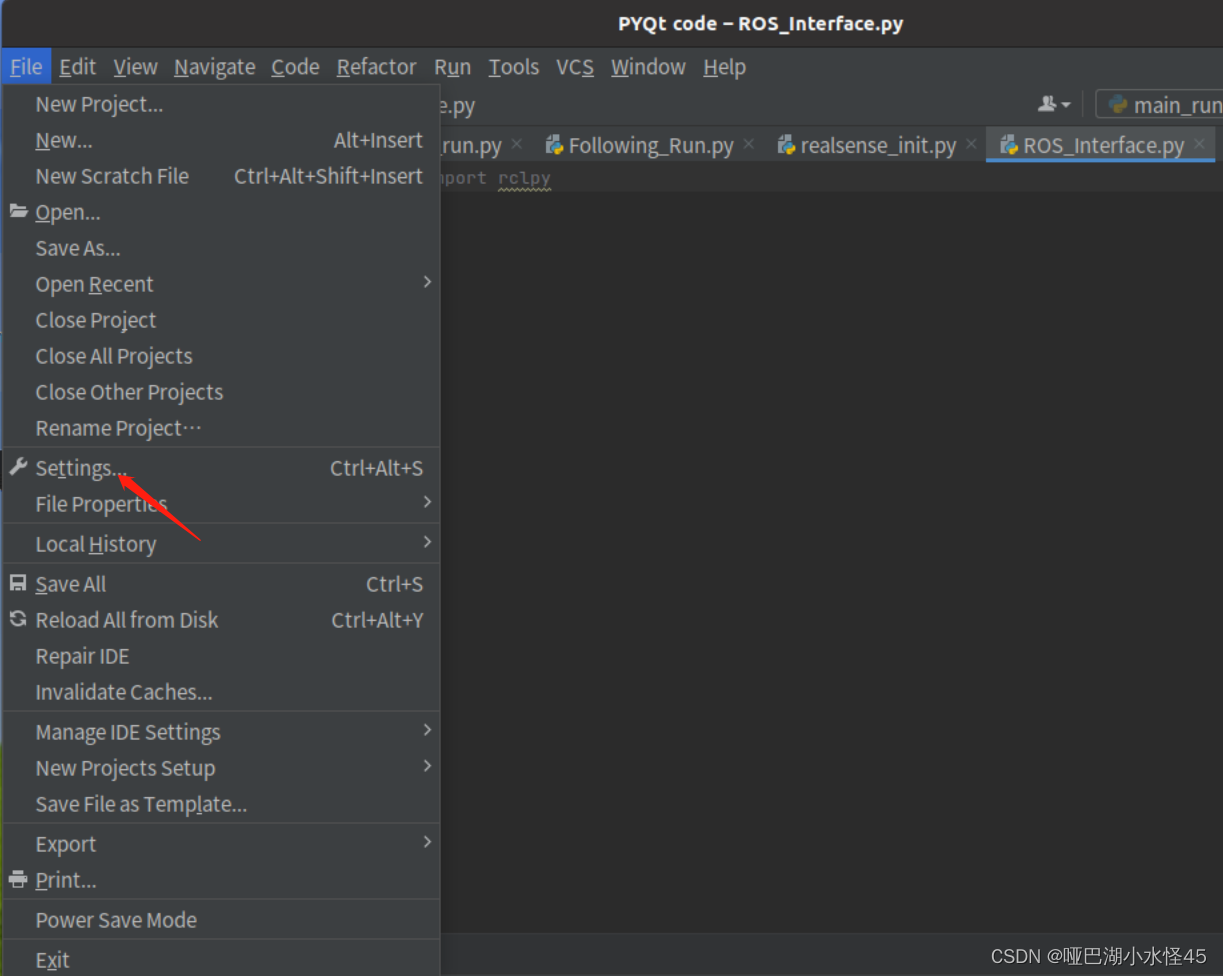
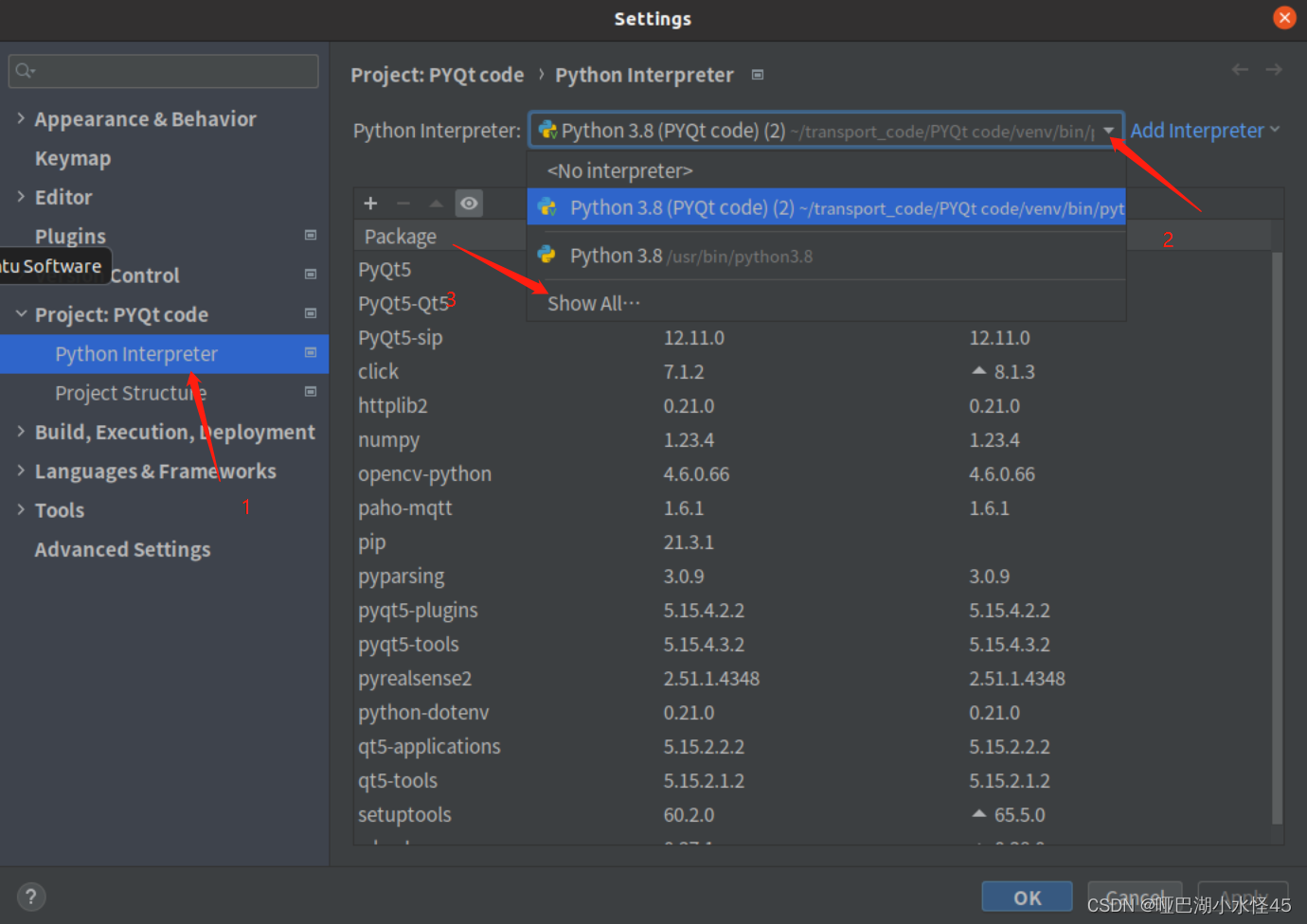
2.2 进入项目解释器->下拉选择python解释器->选择show All,点击进入
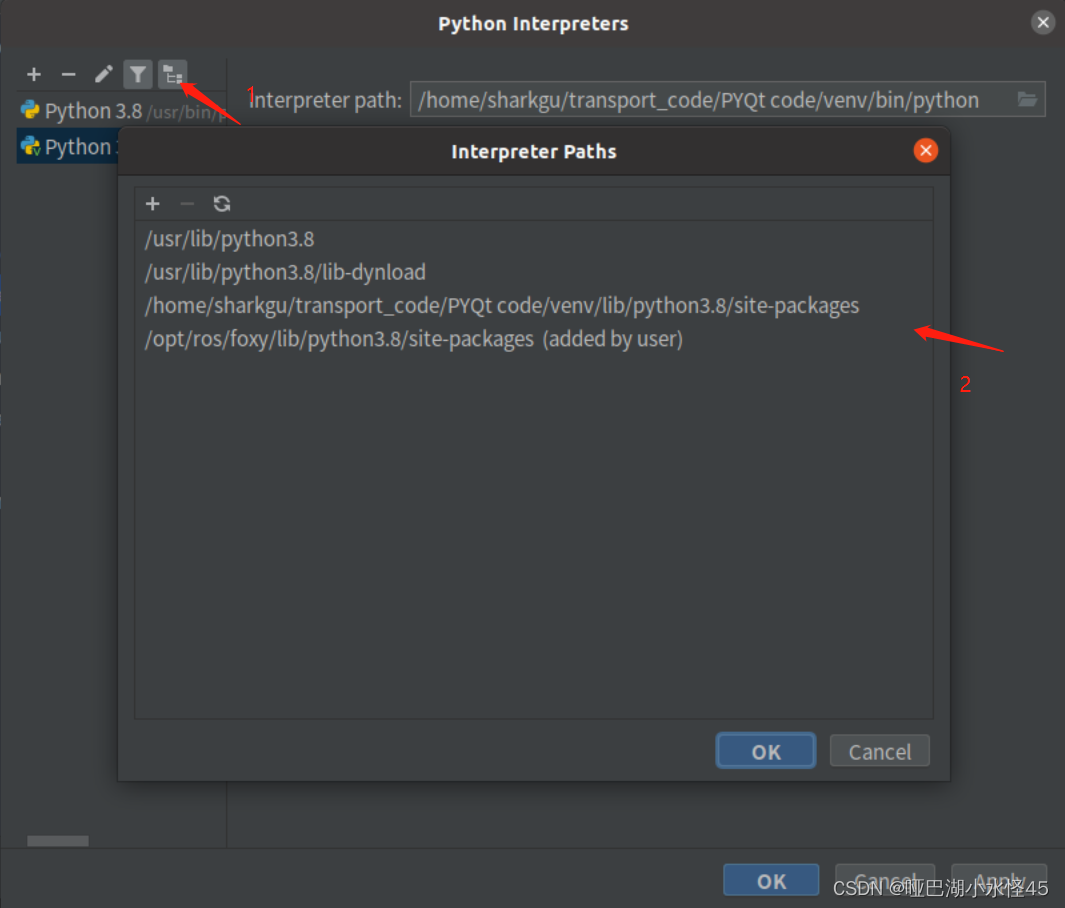
2.3 点击1指向的图标,跳转小界面,点击其中的+号 ,添加/opt/ros/foxy/lib/python3.8/site-packages,这个路径包含rclpy的安装路径,点击site-packages可以找到rclpy包,至此可以添加成功路径
如果安装在其他路径,也是相同的方法找到对应的包安装路径进行添加,其他的包类似操作















 443
443











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









