






这篇操作主要讲授如何将我们的点云投影到一个参数化模型上,简单来举一个例子就是在三维坐标系中选取一个面投影显示这些点,把得到的点显示出来。
创建文件:project_inliers.cpp
#include <iostream>
#include <pcl/point_cloud.h> // for PointCloud
#include <pcl/point_types.h>
#include <pcl/ModelCoefficients.h>
#include <pcl/filters/project_inliers.h>
int
main ()
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_projected (new pcl::PointCloud<pcl::PointXYZ>);
// Fill in the cloud data
cloud->width = 5;
cloud->height = 1;
cloud->points.resize (cloud->width * cloud->height);
for (auto& point: *cloud)
{
point.x = 1024 * rand () / (RAND_MAX + 1.0f);
point.y = 1024 * rand () / (RAND_MAX + 1.0f);
point.z = 1024 * rand () / (RAND_MAX + 1.0f);
}
std::cerr << "Cloud before projection: " << std::endl;
for (const auto& point: *cloud)
std::cerr << " " << point.x << " "
<< point.y << " "
<< point.z << std::endl;
// Create a set of planar coefficients with X=Y=0,Z=1
pcl::ModelCoefficients::Ptr coefficients (new pcl::ModelCoefficients ());
coefficients->values.resize (4);
coefficients->values[0] = coefficients->values[1] = 0;
coefficients->values[2] = 1.0;
coefficients->values[3] = 0;
// Create the filtering object
pcl::ProjectInliers<pcl::PointXYZ> proj;
proj.setModelType (pcl::SACMODEL_PLANE);
proj.setInputCloud (cloud);
proj.setModelCoefficients (coefficients);
proj.filter (*cloud_projected);
std::cerr << "Cloud after projection: " << std::endl;
for (const auto& point: *cloud_projected)
std::cerr << " " << point.x << " "
<< point.y << " "
<< point.z << std::endl;
return (0);
}创建文件:CMakeLists.txt
cmake_minimum_required(VERSION 3.5 FATAL_ERROR)
project(project_inliers)
find_package(PCL 1.2 REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
add_executable (project_inliers project_inliers.cpp)
target_link_libraries (project_inliers ${PCL_LIBRARIES})运行./目标文件
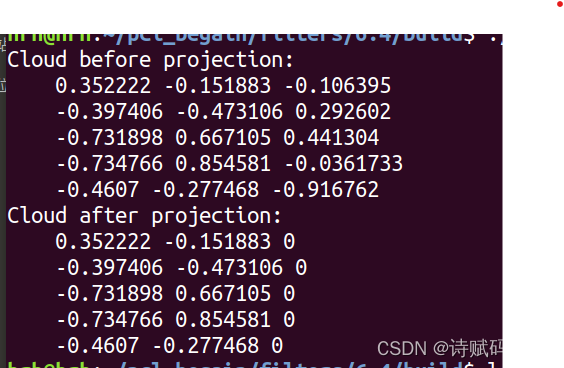
我们可以看到数值第三列z轴上的数值,在投影过后变为了0,代码中设置的参数为a=b=
d=0,投影平面为X-Y平面。
最后并没有像官网教程一样得出三维坐标图像。















 4837
4837

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









