






激光雷达扫描出来的点不可能是非常完美的轮廓,一定会存在一些噪声点。我们可以通过上面这个滤波器,来实现对这些噪声点的去除。
篇章6.2实现了如何滤除规定区域的点,本篇实现如何滤除周围的噪声点。
CMakeLists.txt 文件:
cmake_minimum_required(VERSION 3.5 FATAL_ERROR)
project(statistical_removal)
find_package(PCL 1.2 REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
add_executable (statistical_removal statistical_removal.cpp)
target_link_libraries (statistical_removal ${PCL_LIBRARIES})statistical_removal.cpp文件:
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/filters/statistical_outlier_removal.h>
int
main ()
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered (new pcl::PointCloud<pcl::PointXYZ>);
// Fill in the cloud data
pcl::PCDReader reader;
// Replace the path below with the path where you saved your file
reader.read<pcl::PointXYZ> ("table_scene_lms400.pcd", *cloud);
std::cerr << "Cloud before filtering: " << std::endl;
std::cerr << *cloud << std::endl;
// Create the filtering object
pcl::StatisticalOutlierRemoval<pcl::PointXYZ> sor;
sor.setInputCloud (cloud);
sor.setMeanK (50);
sor.setStddevMulThresh (1.0);
sor.filter (*cloud_filtered);
std::cerr << "Cloud after filtering: " << std::endl;
std::cerr << *cloud_filtered << std::endl;
pcl::PCDWriter writer;
writer.write<pcl::PointXYZ> ("table_scene_lms400_inliers.pcd", *cloud_filtered, false);
sor.setNegative (true);
sor.filter (*cloud_filtered);
writer.write<pcl::PointXYZ> ("table_scene_lms400_outliers.pcd", *cloud_filtered, false);
return (0);
}然后输入
./statistical_removal会生成连个pcd文件。我们使用pcl_viwer打开。
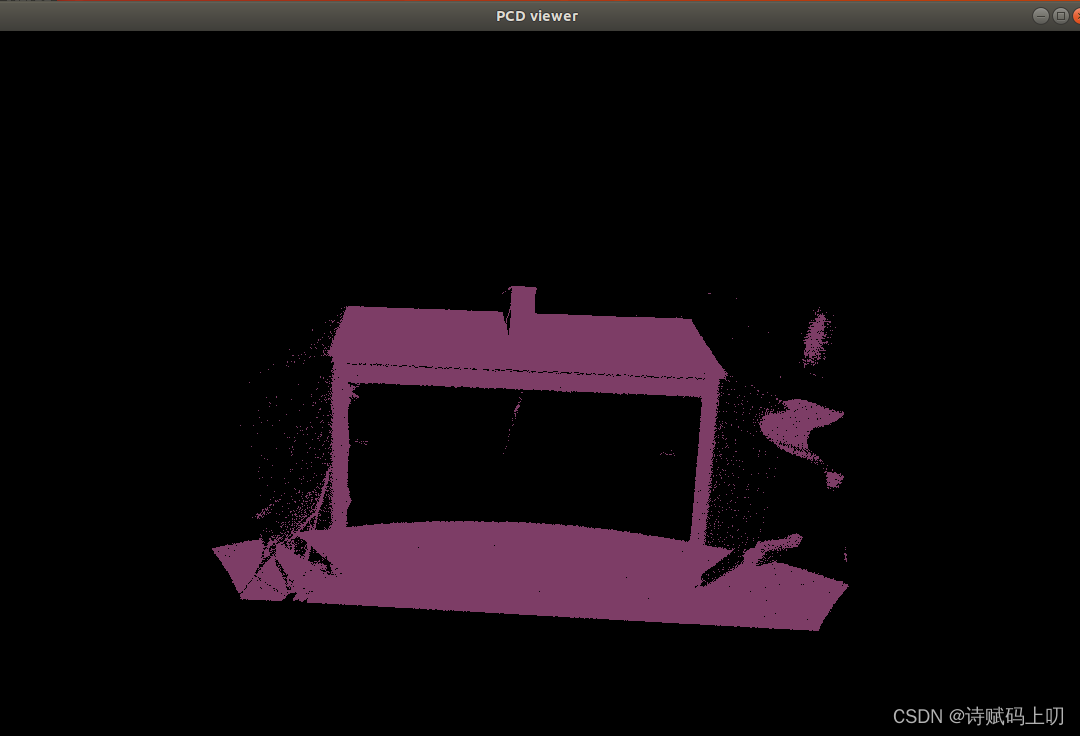
下图为原始图像:
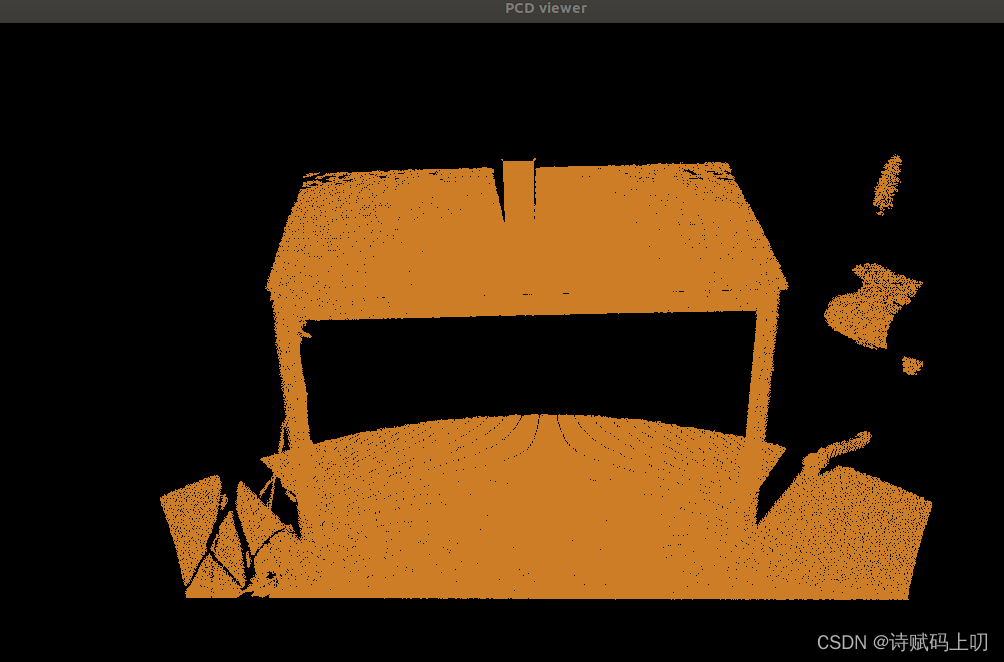
 下图为过滤后的图像,我们可以看到一些边缘上的噪声点被去除了:
下图为过滤后的图像,我们可以看到一些边缘上的噪声点被去除了:
下图为滤掉的点: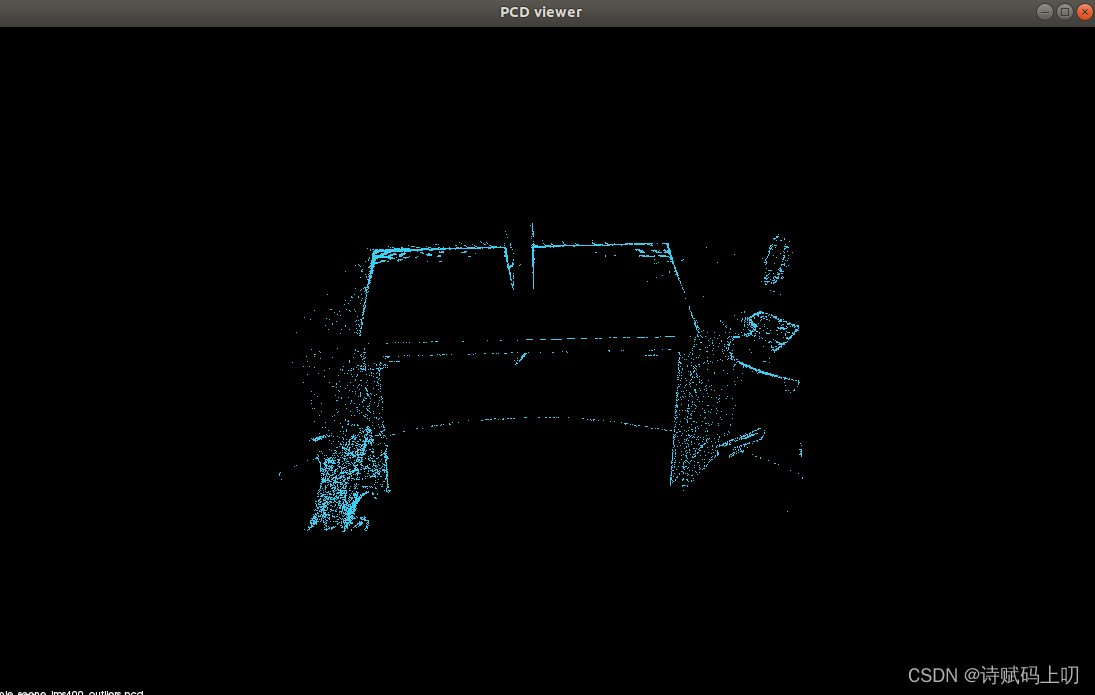















 868
868

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









