







 该博客介绍了使用STM32F407ZGT6开发板结合L298N电机驱动模块控制四个电机的组装过程及程序设计。通过STM32CUBEMX配置电机和红外寻迹模块的引脚,设置时钟和PWM参数。在main.c中启动PWM并定义电机速度,然后在无限循环中调用寻迹函数。寻迹函数根据三个红外传感器的读数判断车辆行驶方向,实现直行、左转、右转或停止。
该博客介绍了使用STM32F407ZGT6开发板结合L298N电机驱动模块控制四个电机的组装过程及程序设计。通过STM32CUBEMX配置电机和红外寻迹模块的引脚,设置时钟和PWM参数。在main.c中启动PWM并定义电机速度,然后在无限循环中调用寻迹函数。寻迹函数根据三个红外传感器的读数判断车辆行驶方向,实现直行、左转、右转或停止。
材料:
(1)stm32f407zgt6最小系统开发板
(2)l298n电机驱动模块1个
(3)四个电机
(4)循迹红外模块3个
一、组装
(1)L298N电机驱动模块与stm32开发板接线如下图:
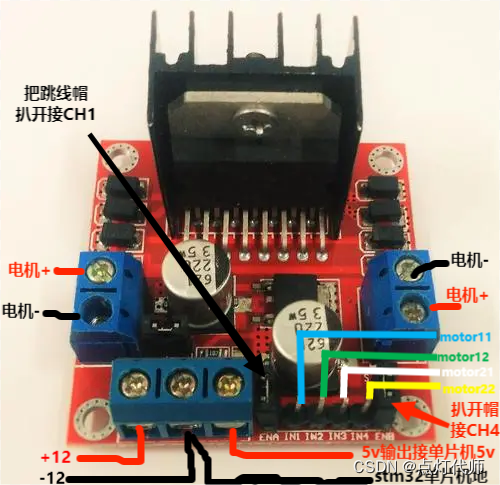
说明:PWM接线把跳线帽扒开接外面引脚 CH1接ENA,CH2接ENB。
(2)寻迹红外接线:

二、主要程序
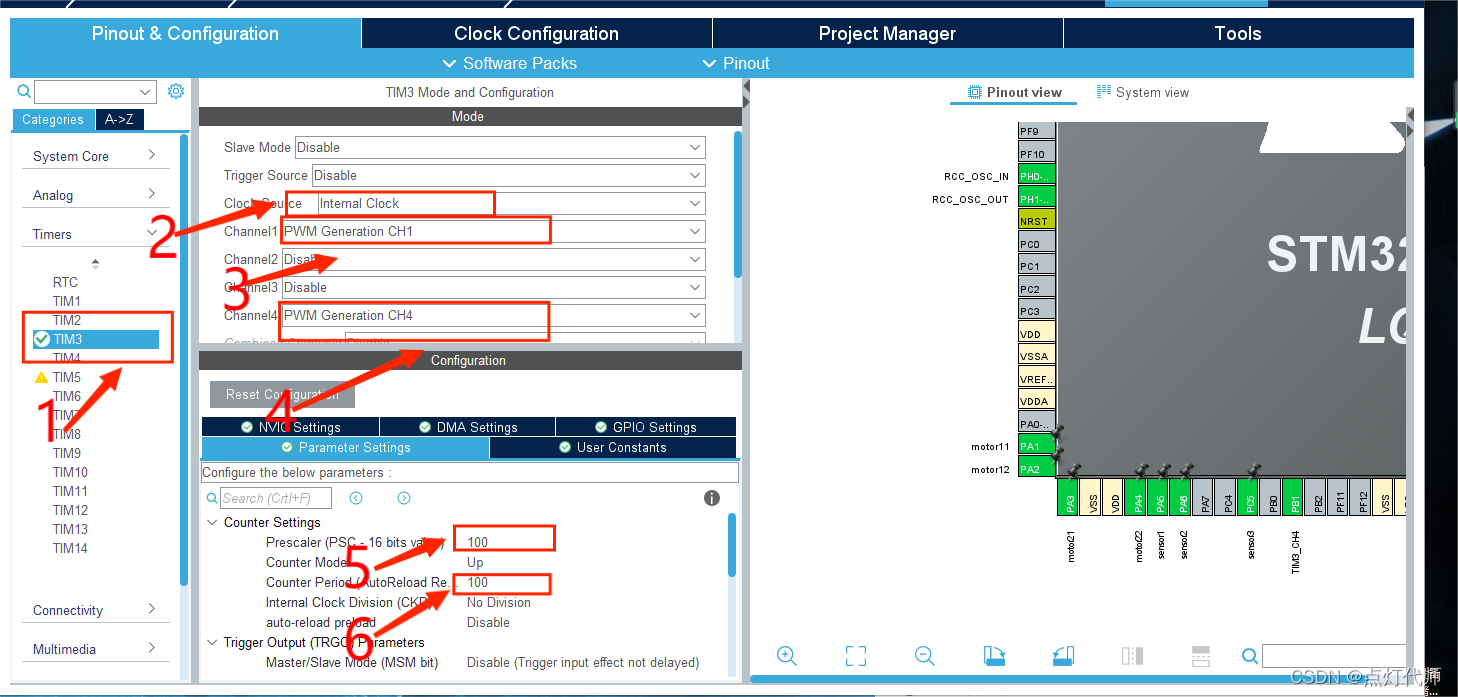
1、STM32CUBEMX配置如下:
(1)引脚配置:
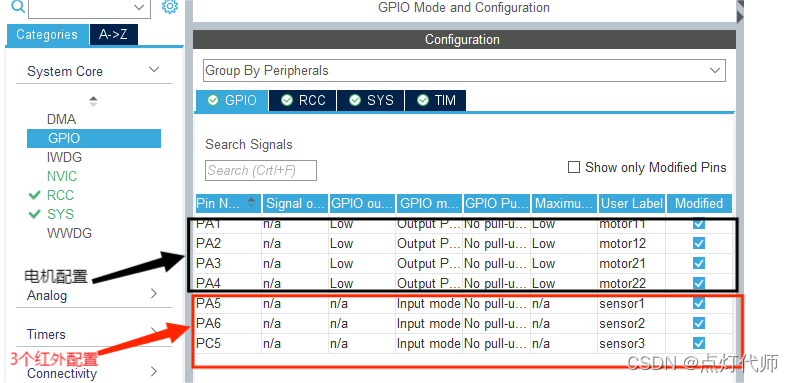
说明:
1)motor11、motor12 、motor21、motor22 为电机驱动引脚
2) sensor1、sensor2、sensor3 为红外引脚
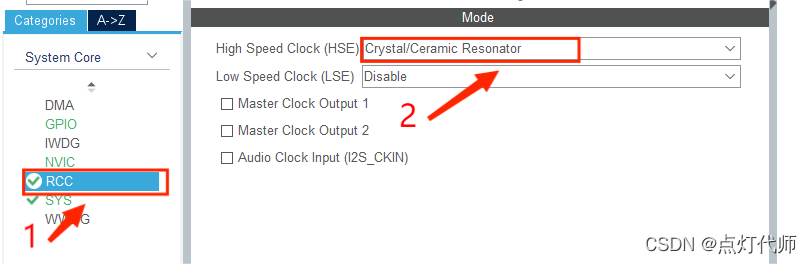
(2)配置RCC时钟: 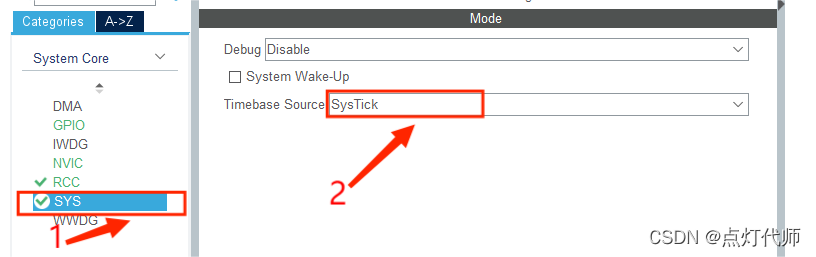
(3) 时钟的配置: 
(4)预分频、分频和占空比配置:
三、程序
main.c
HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_4);
TIM3->CCR1=TIM3->CCR4=80;//两个电机的速度范围(0-100),越大越快。
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
Tracking();//寻迹
}
/* USER CODE END 3 */
main.h
#include "Track.h"
电机程序:
Motor.c
#include "motor.h"
//前进
void car_go_straight(void)
{
HAL_GPIO_WritePin(motor11_GPIO_Port,motor11_Pin,GPIO_PIN_SET);
HAL_GPIO_WritePin(motor12_GPIO_Port,motor12_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(motor21_GPIO_Port,motor21_Pin,GPIO_PIN_SET);
HAL_GPIO_WritePin(motor22_GPIO_Port,motor22_Pin,GPIO_PIN_RESET);
}
//右转
void car_go_right(void)
{
HAL_GPIO_WritePin(motor11_GPIO_Port,motor11_Pin,GPIO_PIN_SET);
HAL_GPIO_WritePin(motor12_GPIO_Port,motor12_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(motor21_GPIO_Port,motor21_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(motor22_GPIO_Port,motor22_Pin,GPIO_PIN_SET);
}
//左转
void car_go_left(void)
{
HAL_GPIO_WritePin(motor11_GPIO_Port,motor11_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(motor12_GPIO_Port,motor12_Pin,GPIO_PIN_SET);
HAL_GPIO_WritePin(motor21_GPIO_Port,motor21_Pin,GPIO_PIN_SET);
HAL_GPIO_WritePin(motor22_GPIO_Port,motor22_Pin,GPIO_PIN_RESET);
}
//停止
void car_go_ahead(void)
{
HAL_GPIO_WritePin(motor11_GPIO_Port,motor11_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(motor12_GPIO_Port,motor12_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(motor21_GPIO_Port,motor21_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(motor22_GPIO_Port,motor22_Pin,GPIO_PIN_RESET);
}
//后退
void car_go_after(void)
{
HAL_GPIO_WritePin(motor11_GPIO_Port,motor11_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(motor12_GPIO_Port,motor12_Pin,GPIO_PIN_SET);
HAL_GPIO_WritePin(motor21_GPIO_Port,motor21_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(motor22_GPIO_Port,motor22_Pin,GPIO_PIN_SET);
}
Motor.h
#ifndef __MOTOR_H_
#define __MOTOR_H_
#include "main.h"
void car_go_straight(void);
void car_go_right(void);
void car_go_left(void);
void car_go_ahead(void);
void car_go_after(void);
#endif
寻迹程序:
Track.c
#include "Track.h"
#include "motor.h"
void Tracking(void)
{
///////////////////////////////////右转
if ((HAL_GPIO_ReadPin(sensor1_GPIO_Port,sensor1_Pin)==1)&&(HAL_GPIO_ReadPin(sensor2_GPIO_Port,sensor2_Pin)==0))
while(1)//10
{
car_go_right();
if((HAL_GPIO_ReadPin(sensor1_GPIO_Port,sensor1_Pin)==1)&&(HAL_GPIO_ReadPin(sensor2_GPIO_Port,sensor2_Pin)==1)&&(HAL_GPIO_ReadPin(sensor3_GPIO_Port,sensor3_Pin)==0))
break ;
}
//////////////////////////////////左转
else if((HAL_GPIO_ReadPin(sensor1_GPIO_Port,sensor1_Pin)==0)&&(HAL_GPIO_ReadPin(sensor2_GPIO_Port,sensor2_Pin)==1))
while(1)//01
{
car_go_left();
if((HAL_GPIO_ReadPin(sensor1_GPIO_Port,sensor1_Pin)==1)&&(HAL_GPIO_ReadPin(sensor2_GPIO_Port,sensor2_Pin)==1)&&(HAL_GPIO_ReadPin(sensor3_GPIO_Port,sensor3_Pin)==0))
break ;
}
/////////////////////////////////直行
else
car_go_straight();
}
Track.h
#ifndef __TRACK_H_
#define __TRACK_H_
#include "main.h"
extern void Tracking(void);
#endif


















 9603
9603

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









