






材料:
(1)stm32f407zgt6最小系统开发板
(2)l298n电机驱动模块1个
(3)四个电机
(4)红外模块2个
一、组装
(1)L298N电机驱动模块与stm32开发板接线如下图:

(2)红外接线

VCC接stm32开发板的3.3v~5v,GND接stm32开发板的GND, OUT1接单片机PA7.OUT2接单片机PC4.
二、主要程序
1、STM32CUBEMX配置如下:
(1)引脚配置:

说明:
1)定义2个电机的引脚
2)motor11和motor12分别为电机(1)的两个引脚
3)motor21和motor22分别为电机(2)的两个引脚
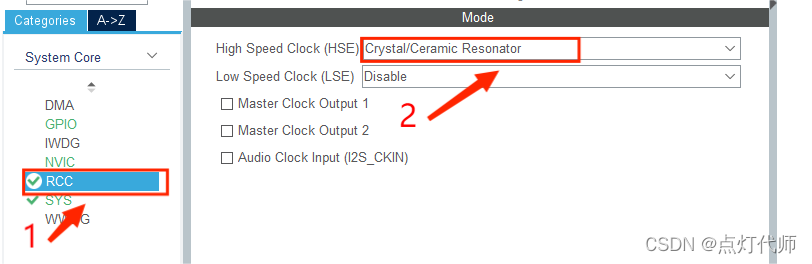
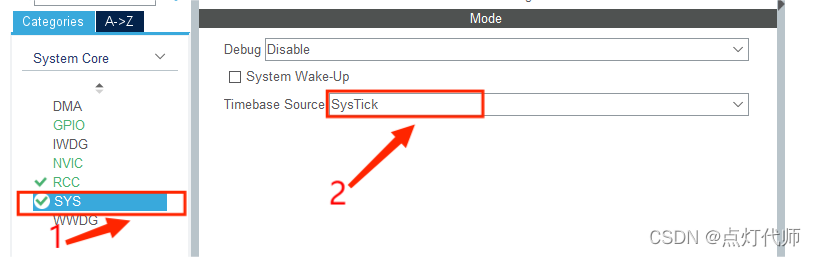
(2)配置RCC时钟:
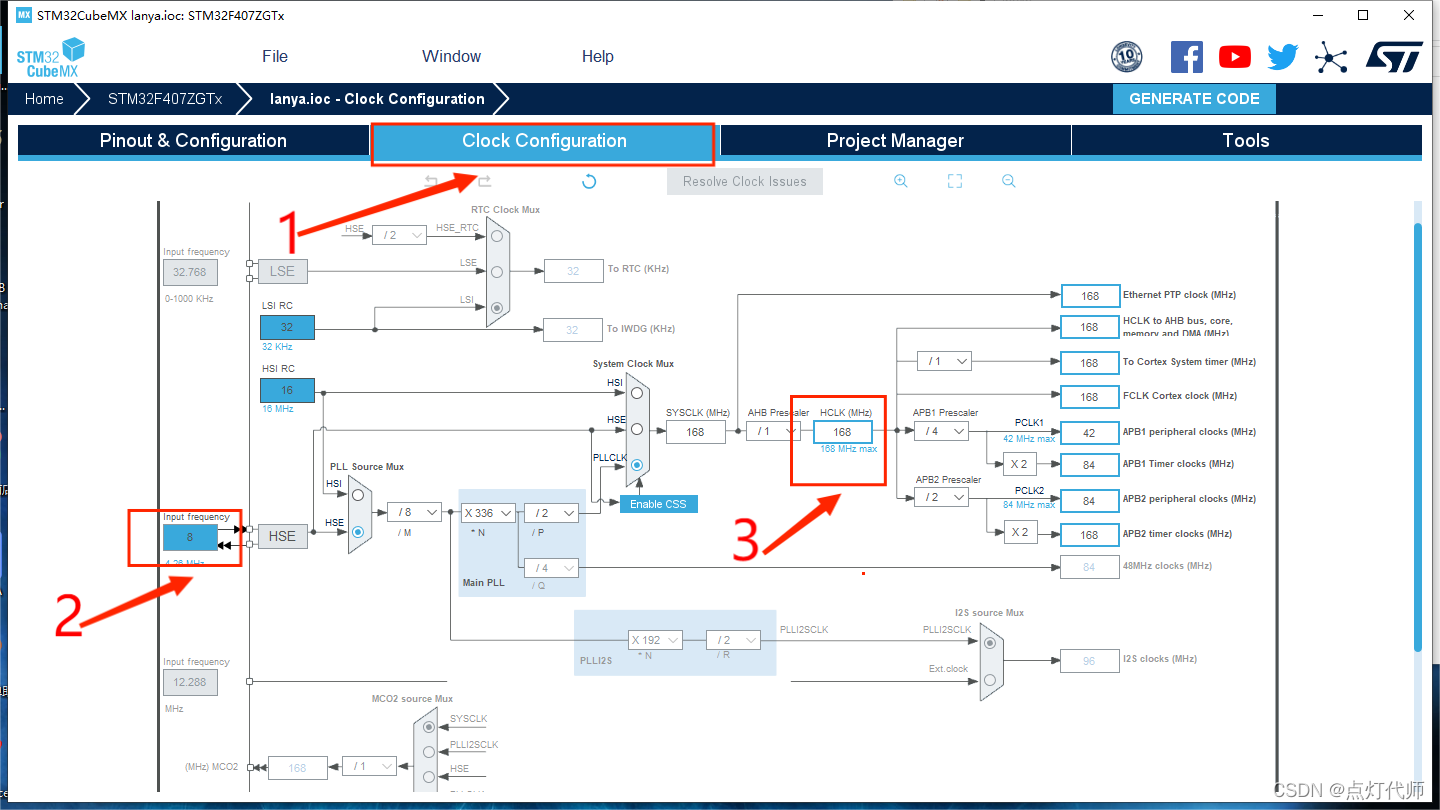
(3) 时钟的配置:
三、程序
main.c
#include "motor.h"
#include "Barrier.h"
while (1)
{
void Barrier();//寻迹
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */电机:
motor.c
#include "motor.h"
//前进
void car_go_straight(void)
{
HAL_GPIO_WritePin(motor11_GPIO_Port,motor11_Pin,GPIO_PIN_SET);
HAL_GPIO_WritePin(motor12_GPIO_Port,motor12_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(motor21_GPIO_Port,motor21_Pin,GPIO_PIN_SET);
HAL_GPIO_WritePin(motor22_GPIO_Port,motor22_Pin,GPIO_PIN_RESET);
}
//右转
void car_go_right(void)
{
HAL_GPIO_WritePin(motor11_GPIO_Port,motor11_Pin,GPIO_PIN_SET);
HAL_GPIO_WritePin(motor12_GPIO_Port,motor12_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(motor21_GPIO_Port,motor21_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(motor22_GPIO_Port,motor22_Pin,GPIO_PIN_SET);
}
//左转
void car_go_left(void)
{
HAL_GPIO_WritePin(motor11_GPIO_Port,motor11_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(motor12_GPIO_Port,motor12_Pin,GPIO_PIN_SET);
HAL_GPIO_WritePin(motor21_GPIO_Port,motor21_Pin,GPIO_PIN_SET);
HAL_GPIO_WritePin(motor22_GPIO_Port,motor22_Pin,GPIO_PIN_RESET);
}
//停止
void car_go_ahead(void)
{
HAL_GPIO_WritePin(motor11_GPIO_Port,motor11_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(motor12_GPIO_Port,motor12_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(motor21_GPIO_Port,motor21_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(motor22_GPIO_Port,motor22_Pin,GPIO_PIN_RESET);
}
//后退
void car_go_after(void)
{
HAL_GPIO_WritePin(motor11_GPIO_Port,motor11_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(motor12_GPIO_Port,motor12_Pin,GPIO_PIN_SET);
HAL_GPIO_WritePin(motor21_GPIO_Port,motor21_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(motor22_GPIO_Port,motor22_Pin,GPIO_PIN_SET);
}
motor.h
#ifndef __MOTOR_H_
#define __MOTOR_H_
#include "main.h"
void car_go_straight(void);
void car_go_right(void);
void car_go_left(void);
void car_go_ahead(void);
void car_go_after(void);
#endif避障:
Barrier.c
#include "Barrier.h"
#include "motor.h"
#include "stm32f4xx_hal.h"
void Barrier(void)
{
// 右红外检测到东西
if ((HAL_GPIO_ReadPin(sensor3_GPIO_Port,sensor3_Pin)==1)&&(HAL_GPIO_ReadPin(sensor4_GPIO_Port,sensor4_Pin)==0))
{
car_go_after();
HAL_Delay (300);
car_go_ahead();
HAL_Delay (300);
car_go_left();
HAL_Delay (300);
car_go_ahead();
HAL_Delay (300);
}
// 左红外检测到东西
else if((HAL_GPIO_ReadPin(sensor3_GPIO_Port,sensor3_Pin)==0)&&(HAL_GPIO_ReadPin(sensor4_GPIO_Port,sensor4_Pin)==1))
{
car_go_after();
HAL_Delay (300);
car_go_ahead();
HAL_Delay (300);
car_go_right();
HAL_Delay (300);
car_go_ahead();
HAL_Delay (300);
}
//两个红外检测到东西
else if((HAL_GPIO_ReadPin(sensor3_GPIO_Port,sensor3_Pin)==0)&&(HAL_GPIO_ReadPin(sensor4_GPIO_Port,sensor4_Pin)==0))
{
car_go_after();
HAL_Delay (300);
car_go_ahead();
HAL_Delay (300);
car_go_left();
HAL_Delay (300);
car_go_ahead();
HAL_Delay (300);
}
else
{
car_go_straight();
}
}
Barrier.h
#ifndef __BARRIER_H_
#define __BARRIER_H_
#include "main.h"
extern void Barrier(void);
#endif
————————————————
版权声明:本文为CSDN博主「点灯代师」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/weixin_65866701/article/details/122180377
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









