







 本文介绍了舵机相关知识,它常用于遥控设备等领域。控制舵机需用PWM波,通过改变占空比可实现舵机不同角度转动。还给出了硬件接线方式,详细说明了PWM1和PWM2模式区别,并提供了舵机控制代码,最终实现单片机驱动舵机在不同角度间旋转。
本文介绍了舵机相关知识,它常用于遥控设备等领域。控制舵机需用PWM波,通过改变占空比可实现舵机不同角度转动。还给出了硬件接线方式,详细说明了PWM1和PWM2模式区别,并提供了舵机控制代码,最终实现单片机驱动舵机在不同角度间旋转。
什么是舵机?
舵机其实是伺服电机的一种别称。通常我们所说的舵机是指可以根据信号转动至指定角度的电机,例如180度舵机。因为这个特性,所以往往被用于很多遥控飞机、遥控给汽车、机器人等领域,用于控制它们的方向和位置。这也是它被称为舵机的原因。
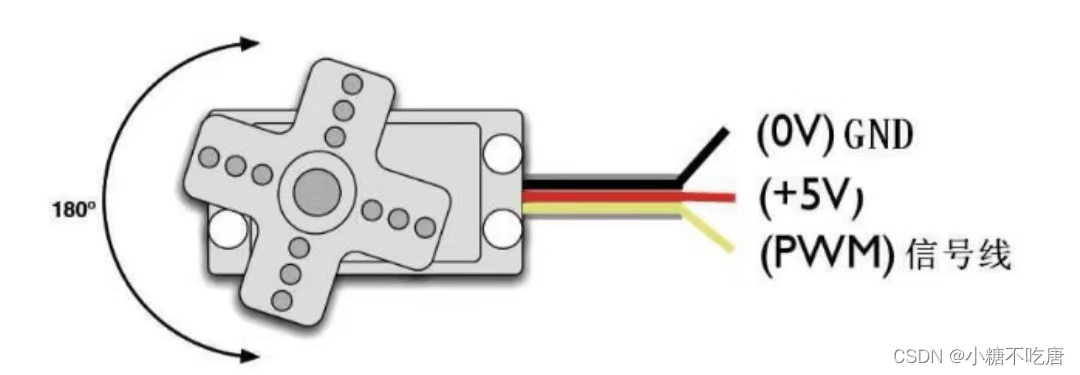
SG90舵机外观如图所示:

SG90引脚如图:
控制舵机就要使用到PWM波。什么是PWM波呢?
PWM(Pulse Width Modulation)——脉冲宽度调制,通过对一系列脉冲信号的宽度进行调制,来等效地获得所需要波形(含形状和幅值)。PWM控制技术在逆变电路中应用最广,应用的逆变电路绝大部分是PWM型,PWM控制技术正是有赖于在逆变电路中的应用,才确定了它在电力电子技术中的重要地位。
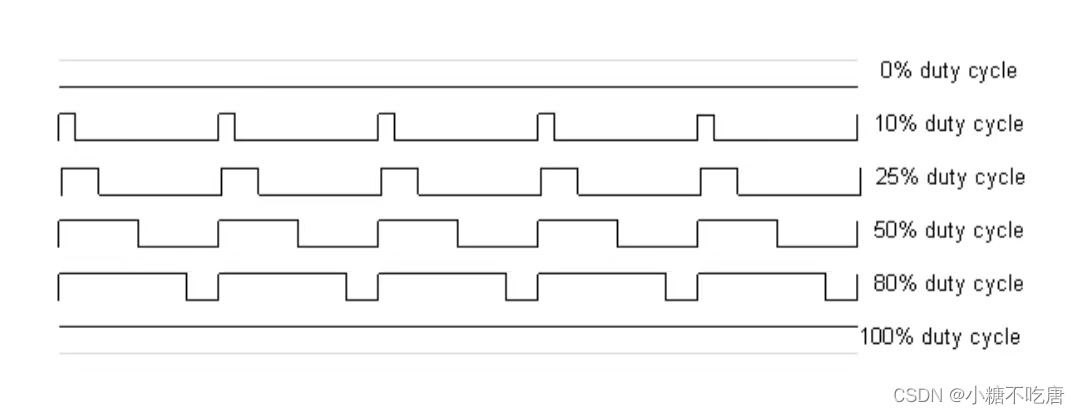
单片机驱动舵机的原理简单来说就是改变其占空比来实现舵机转动不同的角度,什么是占空比?
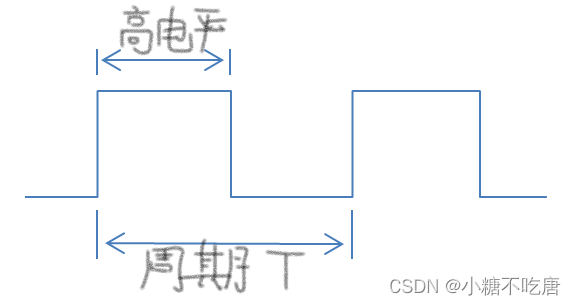
占空比是指在一个脉冲循环内,通电时间相对于总时间所占的比例。(简单来说就是一个周期内高电平的时间除以这个周期再乘以100%)
如图:
硬件接线如下:
舵机黄色杜邦线——————PB5
舵机棕色杜邦线——————GND
舵机虹色杜邦线——————5V
接下来就是编写代码实现单片机控制舵机旋转我们设置的角度。
舵机控制代码如下:
PWM.C代码如下:
#include "pwm.h"
void Pwm_Init(void)
{
GPIO_InitTypeDef PWM_Initstructure; //定义GPIO端口结构体
TIM_TimeBaseInitTypeDef TIM_Initstructure; //定义TIM结构体
TIM_OCInitTypeDef OC_Initstructure; //定义输出比较结构体
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //打开端口时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //打开定时器的时钟
PWM_Initstructure.GPIO_Pin = GPIO_Pin_5;
PWM_Initstructure.GPIO_Mode = GPIO_Mode_AF_PP;
PWM_Initstructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &PWM_Initstructure);
TIM_Initstructure.TIM_ClockDivision = TIM_CKD_DIV1; //不分频
TIM_Initstructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数
TIM_Initstructure.TIM_Period = 200-1;
TIM_Initstructure.TIM_Prescaler = 7200-1;
TIM_TimeBaseInit(TIM3, &TIM_Initstructure);
TIM_Cmd(TIM3, ENABLE); //使能时钟
OC_Initstructure.TIM_OCMode = TIM_OCMode_PWM1; //采用PWM1模式,PWM1和PWM2的区别请继续往下看
OC_Initstructure.TIM_OutputState = TIM_OutputState_Enable; //配置输出使能OR使能
OC_Initstructure.TIM_OCPolarity = TIM_OCPolarity_Low; //比较输出极性
TIM_OC2Init(TIM3, &OC_Initstructure); //输出比较初始化
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //启用CCR2上的TIM3外围预加载寄存器。
}PWM.H代码如下:
#include "stm32f10x.h"
void Pwm_Init(void);PWM1和PWM2的区别如下:
pwm1模式:
在向上计数时:一旦TIMx_CNT<TIMx_CCR1时通道为有效电平,否则为无效电平。
在向下计数时:一旦TIMx_CNT>TIMx_CCR1时通道为无效电平,否则为有效电平。
(总结:在PWM1模式下,无论是向上计数还是向下计数,TIMx_CNT<TIMx_CCR1时通道为有效电平)
pwm2模式:
在向上计数时:一旦TIMx_CNT<TIMx_CCR1时通道为无效电平,否则为有效电平。
在向下计数时:一旦TIMx_CNT>TIMx_CCR1时通道为有效电平,否则为无效电平。
(总结:在PWM2模式下,无论是向上计数还是向下计数,TIMx_CNT>TIMx_CCR1时通道为有效电平)
注:在配置输出比较结构体的时候可以选择有效电平是高电平还是低电平。
main.c代码如下:
#include "stm32f10x.h"
#include "pwm.h"
void delay(uint16_t time)
{
uint16_t i;
while(time--)
{
i = 12000;
while(i--);
}
}
int main()
{
uint8_t i = 195;
Pwm_Init();
while(1)
{
for(i = 195; i >= 175; i-=5)
{
TIM_SetCompare2(TIM3, i);
delay(300);
if(i < 175)
{
i = 195;
}
}
}
}
实现单片机驱动舵机效果
即:0°转到45°
45°转到90°
90°转到135°
135°转到180°
180°转到0°



















 2344
2344

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











