






 本文详细介绍了PID控制在加热应用中的参数设定,包括自整定过程、FX3U-4AD-TC-ADP模块配置以及PID输出机制。PID动作和错误处理也做了说明。
本文详细介绍了PID控制在加热应用中的参数设定,包括自整定过程、FX3U-4AD-TC-ADP模块配置以及PID输出机制。PID动作和错误处理也做了说明。
用PID控制加热是PID控制的最常用的使用场合之一,下面的程序为PID控制的基本样式。
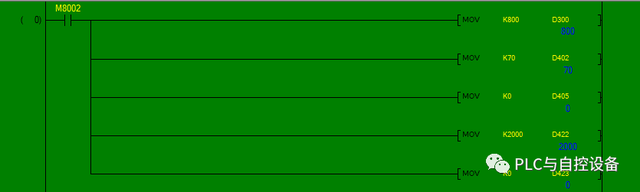
▲ 参数设定
开机脉冲设定:目标温度值为80°C,输入数字为800,含小数1位;输入滤波常数为70%;微分增益为0%;输出值上限设定为2000ms(2s);输出值下限设定为0ms。
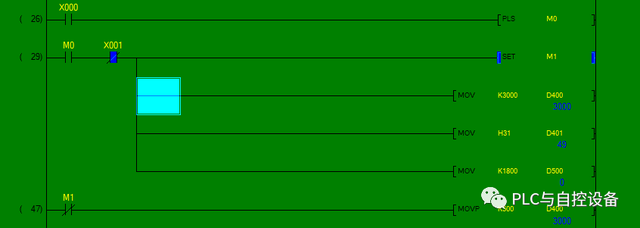
▲ PID自整定参数
X0为先执行PID自整定,然后执行PID一般输出的开关。
X1为执行PID一般输出的开关。
X0接通第一个上升沿脉冲,M0接通一个扫描周期,驱动自整定标志位M1。
设定自整定采样时间为3000ms,自整定的输出值为1800ms。
非自整定时的采样时间为500ms。
H31设定ACT动作为110001的值,逆动作、无输入变化量报警、无输出变化量报警、执行自整定、输出值上下限设定有效,如下表:
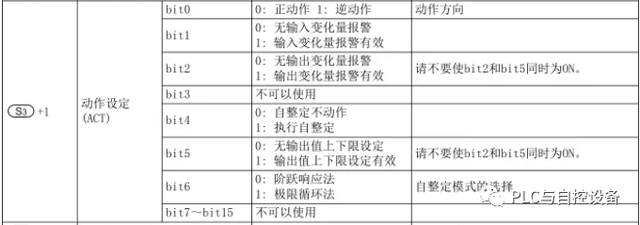
▲ ACT动作设定
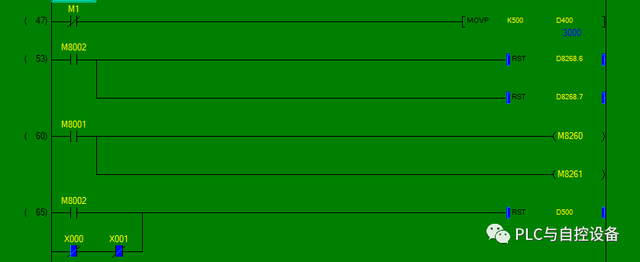
▲ FX3U-4AD-TC-ADP设定与PID初始化
D8268.6与D8268.7为上电清除ADP模块的报警,M8260为设定温度单位为摄氏度,M8261为设定测温传感器为K型热电偶。

▲ PID输出
根据PID指令要求的目标值D300、测定值D8260(FX3U-4AD-TC-ADP的通道1数据)、参数值D400+、自动计算出输出值D500,PID动作标志位M10输出为1。
自整定完成后,完成标志位D501.4自动复位,同时把M1复位,此后执行一般状态PID运算输出。
PID动作中的最大周期设定为定时器的定时时间2000ms。如某周期输出值为D500=500ms,则定时器T246的当前值为0~500ms时,并且PID在执行中时,输出Y0给加热器通电;因上限值设定为2000ms,D500的值为不超过2000ms的数,加热不会超过2000ms。
M8067为PID指令的出错标志位,系统已将出错信息代码存入寄存器D8067中。
感谢阅读指正,关注了解更多。


















 4540
4540

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











