






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
这是对高斯混合概率假设密度滤波器(GM-PHD)的实现,该滤波器在以下文献中有描述:

摘要:
针对存在数据关联不确定性、检测不确定性、噪声和误报的情况,提出了一种新的递归算法,用于从一系列观测集中联合估计目标数量和状态的时变情况。该方法涉及将目标和测量的各个集合建模为随机有限集,并应用概率假设密度(PHD)递归来传播后验强度,后验强度是目标随机有限集的一阶统计量。目前,对于PHD递归,尚无闭式解。本文表明,在对目标动态和出生过程进行线性、高斯假设的情况下,任意时间步长处的后验强度是高斯混合的。更重要的是,推导出了传播后验强度的成分高斯组件的均值、协方差和权重的闭式递归。提出的算法将这些递归与一种管理高斯组件数量以提高效率的策略相结合。此算法通过使用扩展卡尔曼滤波器和无迹卡尔曼滤波器中的近似策略,扩展以适应轻微非线性的目标动态。
GM-PHD滤波器是一种用于估计测量数据中目标数量和位置的方法。其优点包括表示目标位置不确定性(使用协方差矩阵)以及目标存在不确定性(使用权重),并且在更新步骤中不存在数据关联。这个实现进行了相当详细的注释,可能对试图了解GM-PHD滤波的人会很有帮助,但是Vo&Ma的论文是理解实际情况的关键。
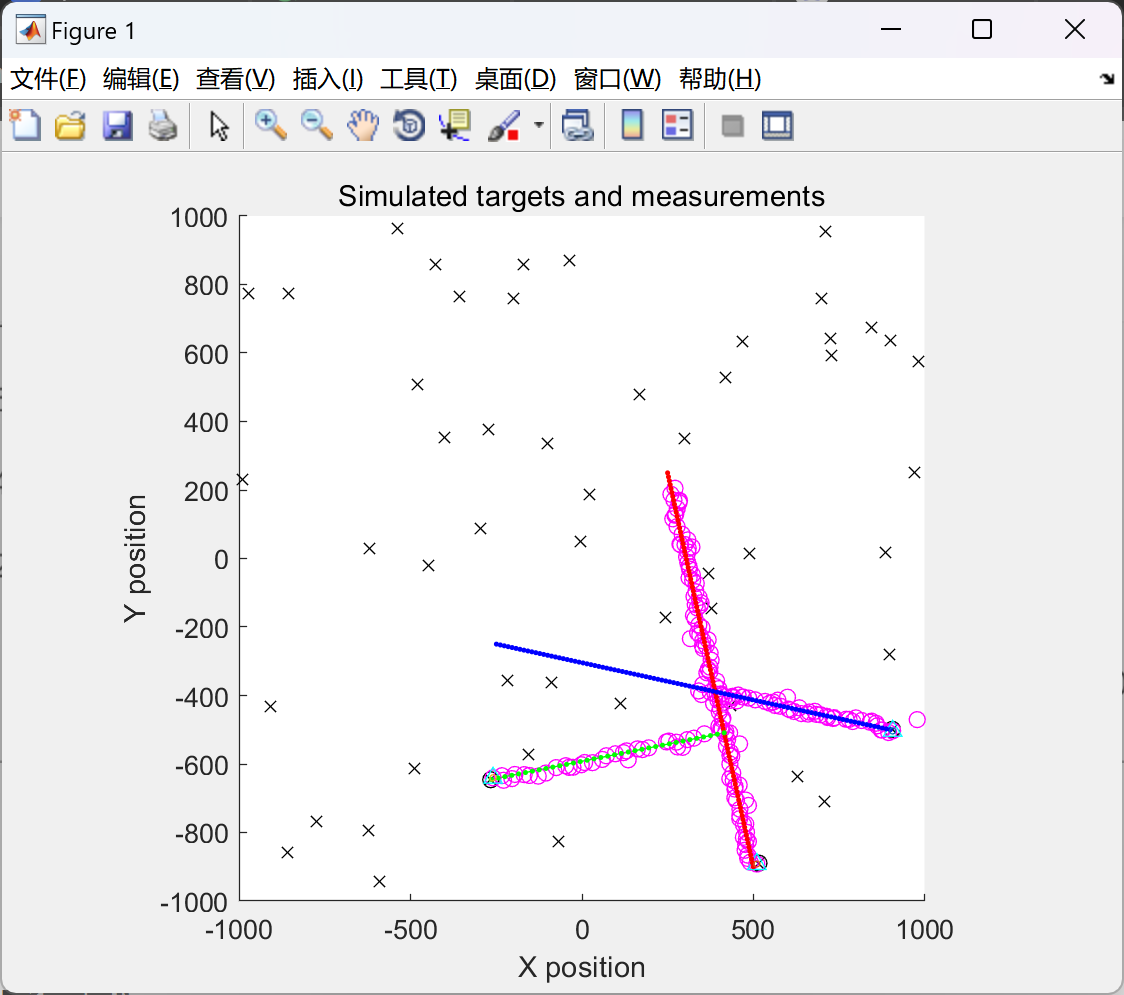
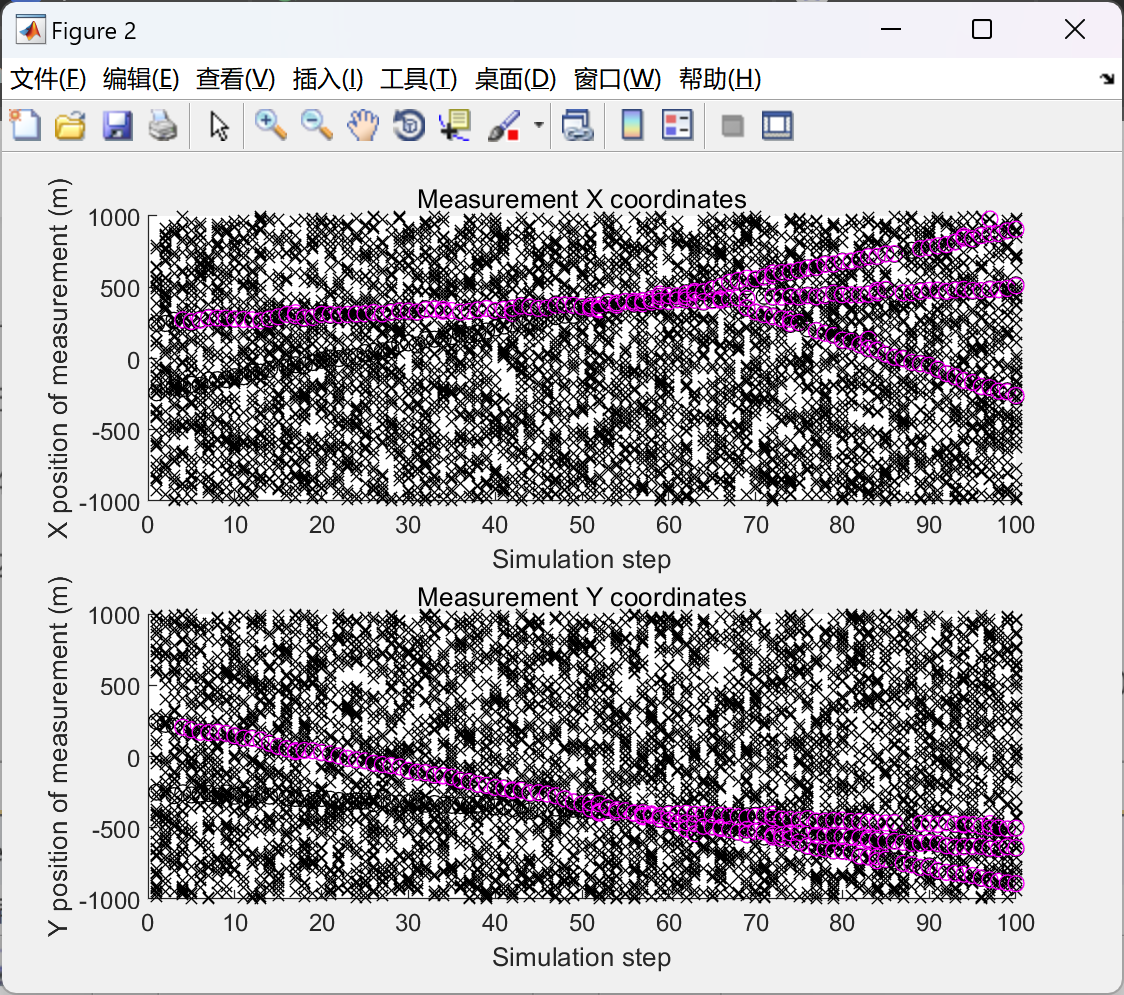
模拟器在杂波环境中创建两个移动目标的嘈杂测量数据,大约在模拟的中间阶段创建第三个目标。这是一个相当简单的问题,但它有效地演示了滤波器的性能。Vo&Ma用它来演示线性GM-PHD滤波器,但我也用它来演示EKF版本,而不是编码他们描述的EKF模拟器。

这对于GM-PHD滤波器的工作并不是必需的,但提供了一种很好的可视化和量化性能的方式。如果人们想要调整这段代码,该度量是观察性能如何的一种很好的方式,并且可以相对容易地修改这个实现,以使用相同的数据执行多个测试运行,但使用不同的滤波器参数并比较度量。
错差(或称为误差)的概念,在任何过滤/控制问题中都起着基础性的作用,它表示参考量与其估计/控制值之间的差异。然而,在已经建立的多目标过滤领域中,尚无对错差的令人满意的概念。在本文中,我们概述了现有度量标准在多目标错差方面的不一致性,用于性能评估。然后,我们提出了一种新的在数学上和直观上都一致的度量标准,以解决当前多目标性能评估度量标准的缺点。
📚2 运行结果
2.1 GM-PHD滤波器,不包含扩展卡尔曼滤波器EKF

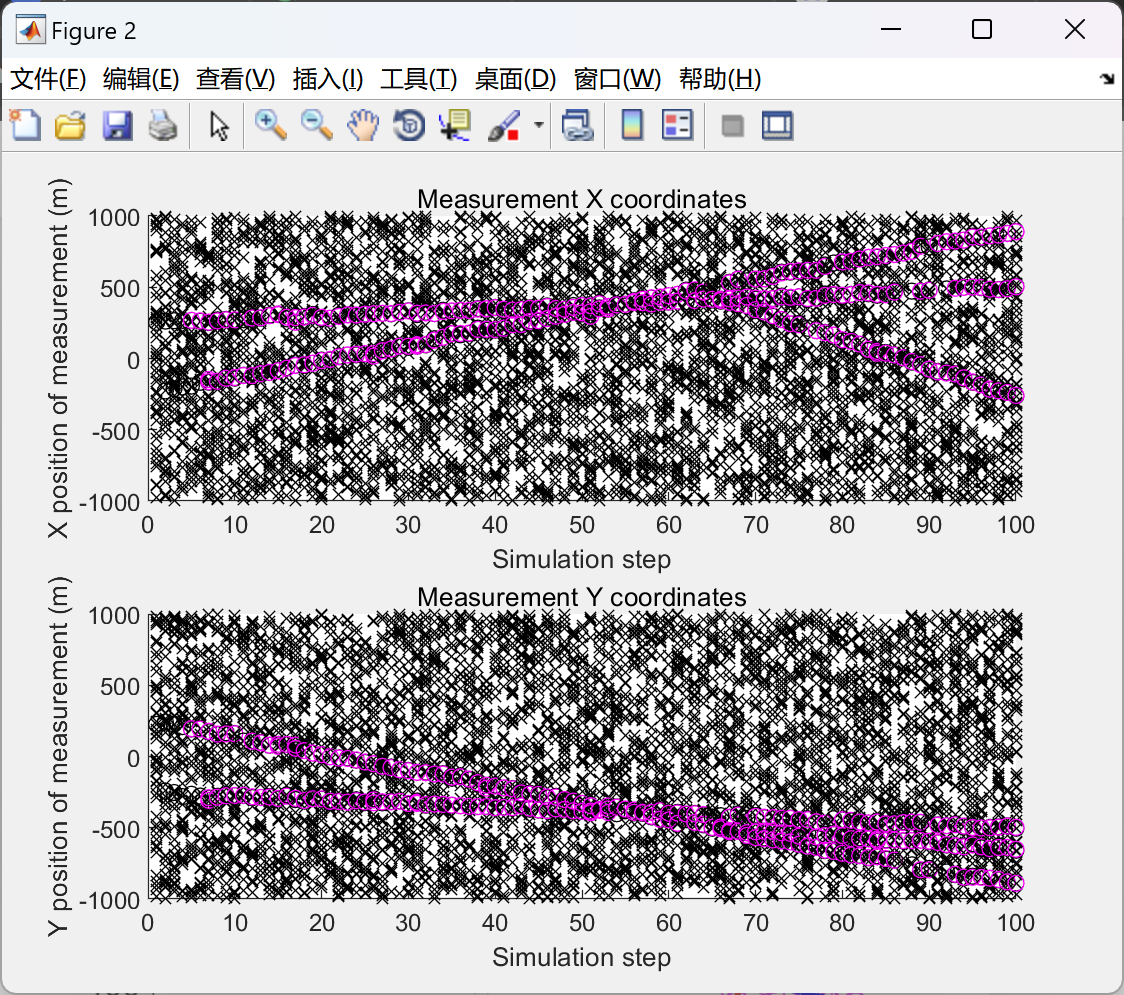

2.2 GM-PHD滤波器,包含扩展卡尔曼滤波器EKF

部分代码:
%Step Sim: Generate sensor Measurements
%If you want to use this code with your own data or for a different problem,
%replace this function with your own.
if USE_EKF == 0
GM_PHD_Simulate_Measurements; %Linear KF measurements are simulated direct observations [X; Y] of the target positions
else
GM_EKF_PHD_Simulate_Measurements; %EKF measurements are simuated range-bearing [r; theta] of the target position from a fixed sensor.
end
%Linear KF use fixed matrices for prediction and update.
%EKF calculates Jacobians to linearise the prediction and observation
%models. There is need for an inverse sensor model to map from sensor
%to target space for some calculations.
if(USE_EKF == 0)
%Step 1: Prediction for birthed/spawned targets
GM_PHD_Predict_Birth;
%Step 2: Prediction for existing targets
GM_PHD_Predict_Existing;
%Step 3: Construction of PHD update components
GM_PHD_Construct_Update_Components;
%Step 4: Update targets with measurements
GM_PHD_Update;
else
%Step 1: Prediction for birthed/spawned targets
GM_EKF_PHD_Predict_Birth; %EKF prediction uses Jacobians to linearise the prediction model and predict the targets forward in time
%Step 2: Prediction for existing targets
GM_EKF_PHD_Predict_Existing;
%Step 3: Construction of PHD update components
GM_EKF_PHD_Construct_Update_Components;
%Step 4: Update targets with measurements
GM_EKF_PHD_Update;
end
%Step 5: Prune targets
GM_PHD_Prune;
%Step 6: Estimate position of targets
GM_PHD_Estimate
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]B.-N. Vo, W.-K. Ma, "The Gaussian Mixture Probability Hypothesis Density Filter", IEEE Transactions on Signal Processing, Vol 54, No. 11, November 2006, pp4091-4104.
[2]Schuhmacher, D.; Ba-Tuong Vo; Ba-Ngu Vo, "A Consistent Metric for Performance Evaluation of Multi-Object Filters," Signal Processing, IEEE Transactions on , vol.56, no.8, pp.3447,3457, Aug. 2008.














 852
852











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









