






 本文详细解析了ORB-SLAM3相较于ORB-SLAM2的改进,特别是IMU初始化过程,包括状态扩展、跟踪策略的变化,以及在单目和双目模式下的初始化步骤。着重介绍了如何利用IMU快速跟丢恢复和提高精度。
本文详细解析了ORB-SLAM3相较于ORB-SLAM2的改进,特别是IMU初始化过程,包括状态扩展、跟踪策略的变化,以及在单目和双目模式下的初始化步骤。着重介绍了如何利用IMU快速跟丢恢复和提高精度。
一.总体流程
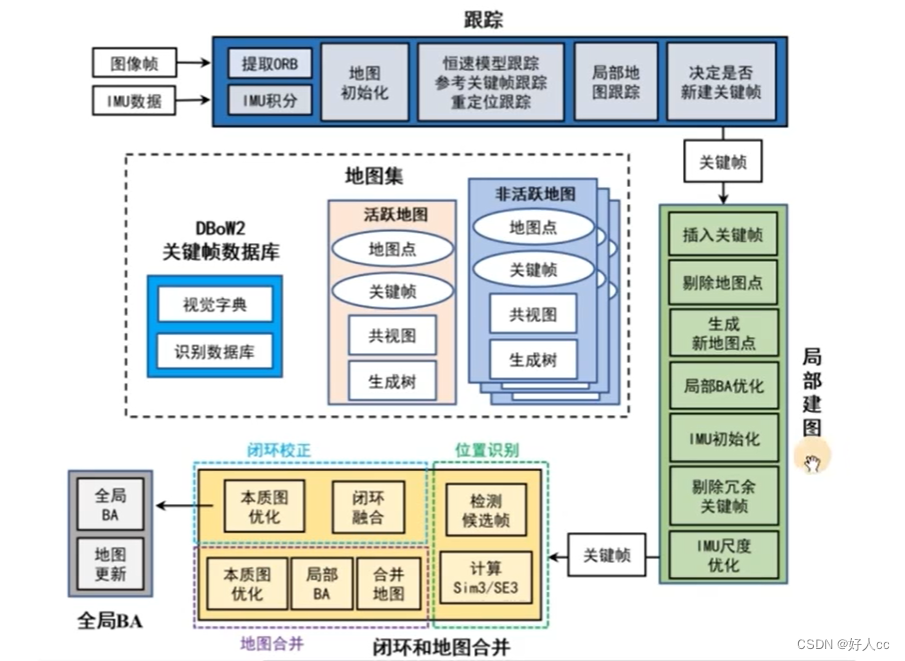
二.跟踪线程
ORB-SLAM3与ORB-SLAM2的新增
第一阶段:
1.增加了一个状态---RECENTLY_LOST,可以在短时间内跟丢的情况下,用IMU支撑。
2.参考帧跟踪:把跟踪成功的判断标准变得宽松了。
3.恒速跟踪:IMU如果初始化成功,就用IMU估计位姿,否则用速度模型。同时也扩宽了跟踪成功的条件。
4.重定位跟踪:把EPnP换成了MLPnP(至少需要6对点)。
第二阶段:
1.如果IMU未初始化成功或者虽然初始化成功但距离上一次重定位时间比较近,仅优化位姿。否则,如果地图未变更,则通过上一个普通帧以及当前帧的视觉信息和IMU信息联合优化当前帧位姿,速度,和IMU零偏。如果地图变更,则用上一关键帧以及当前帧的视觉信息和IMU信息联合优化当前帧位姿,速度,和IMU零偏。
2.跟踪成功的条件变了。
三.局部建图线程的目的和意义
1.承上启下,接受跟踪线程输入的关键帧并进行局部地图优化,删除冗余关键帧等,将优化后的关键帧发送给闭环线程。
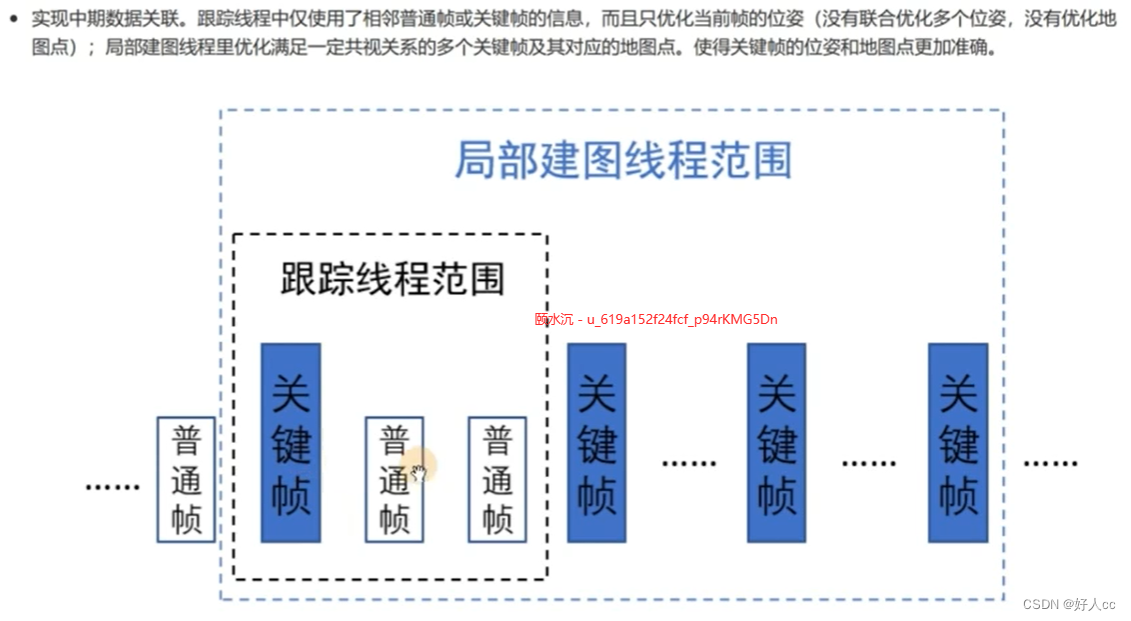
2.实现中期数据关联
 三.IMU初始化
三.IMU初始化
3.1为什么要IMU初始化?
惯性变量包括:重力方向和IMU零偏。先说零偏,IMU零偏不是固定的,是随时间变化的。由于零偏对IMU的影响较大,所以通常作为一个独立的状态来优化。再说重力方向,在视觉惯性模式下,系统以视觉初始化成功的第一帧作为世界坐标系原点,如果不进行IMU初始化,则无法消除重力对IMU积分的影响。IMU初始化的目的就是把图像建立的世界坐标系的z轴拉到和重力方向平行的状态。
3.2IMU初始化是如何进行的
单目情况:
1.在纯视觉单目SLAM模式下,通过运动恢复结构的方式完成了地图初始化,估计的位姿比较准确,但是缺少尺度,先解决纯视觉地图初始化,将会促进IMU的初始化。
2.纯视觉模式估计的位姿的不确定性远小于IMU的不确定性,因此可以在第一次求解IMU参数时忽略不计。所以,后续只进行纯惯性最大后验估计,将缺少尺度的视觉SLAM轨迹看作常量。
3.IMU初始化主要分为
- 纯视觉最大后验估计
在纯视觉单目SLAM模式下,用运动恢复结构的方式完成地图初始化后,用较高的频率插入关键帧。因为关键帧之间的时间间隔短,所以对关键帧之间的IMU数据计算预积分分量时的不确定性也比较低。这样就可以得到一个由10个关键帧位姿和几百个地图点组成的地图。注意,此时的地图尺度是未知的。
- 纯惯性最大后验估计
这一步的目的是获得惯性变量的最佳估计。因为上一步的尺度是未知的,此时没有惯性变量的可靠估计,如果贸然地进行视觉惯性联合优化,很容易陷入局部极小值,而且计算量也较大。一种有效的解决方案是固定轨迹,执行纯惯性优化。当完成纯惯性优化后,会用估计的尺度值将视觉的结果缩放到真实的尺度,包括帧的位姿、速度和地图点,并旋转地图坐标系以使z轴与估计的重力方向对齐。IMU零偏初始值为0,优化后更新为更合理的估计值,并且用最新的惯性参数更新IMU预积分结果,以减少后续的线性误差。
- 视觉惯性联合最大后验估计
经过前两个步骤,对惯性和视觉参数有了良好的估计,就可以执行视觉惯性联合优化,以进一步对之前的估计结果进行优化。此时认为IMU初始化成功,尺度、IMU参数、重力方向和地图都是准确的。
双目情况:
对于双目惯性初始化,只需要将尺度因子固定为1,并将其从纯惯性的优化变量中删除,目的就是加速其收敛,这样就完成了单目->双目。
3.3IMU初始化失败的可能
速度很慢可能失败。
改进:在纯惯性优化的基础上进行修改,虽然包含所有插入的关键帧,但只估计尺度和重力方向两个参数,其他不参与优化,提高计算效率。
四.IMU初始化代码实现
在局部见图中完成初始化,要求地图中存在10帧以上的关键帧才可以。目的就是积累足够的数据来进行初始化。分为以下几步:
- 第一阶段初始化,目的是快速初始化IMU,尽快用IMU来跟踪。完成第一阶段初始化之后就可以用IMU预积分结果来预测跟踪线程中当前帧的位姿了,同时在进入跟踪第二阶段---局部地图跟踪时,会使用视觉+IMU联合优化位姿。
- 目的是快速修正IMU,在短时间内使得IMU参数相对可靠。
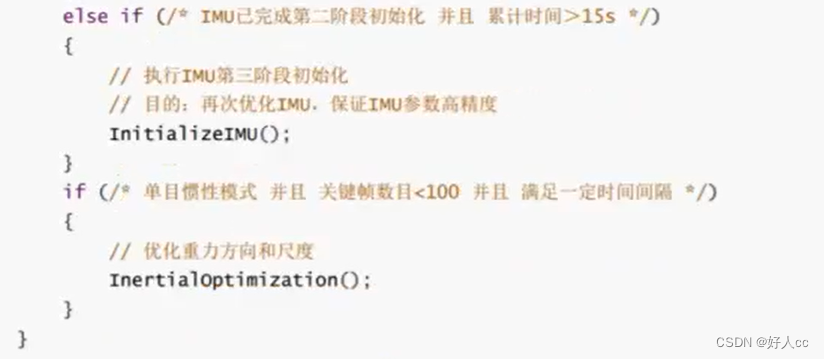
- 再次优化IMU,保证IMU参数的高精度。
- 在单目模式下增加了单独优化重力方向和尺度。

五.IMU初始化代码
代码:InitializeIMU
- 对于不满足初始化的条件直接退出,条件包括有位置请求,地图中关键帧数目小于10和留存时间太短。
- 在IMU初始化之前,通知跟踪线程不再创建新的关键帧,将局部建图线程缓存队列中未处理的新关键帧也加入进来。
- 开始初始化,计算重力方向,然后纯惯性优化尺度、重力方向及零偏。
- 用上一步得到的惯性参数恢复重力方向与尺度信息,同时更新跟踪线程中的普通帧的位姿,标记为IMU初始化成功。
- 执行视觉惯性全局BA,更新地图中的位姿和地图点坐标。


















 731
731

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









