






一、三菱PLC介绍
二、步进电机介绍
三、限位传感器(接近开关)的介绍
1、接近开关概念:
接近开关又称无触点接近开关,是理想的电子开关量传感器。当金属检测体接近开关的感应区域,开关就能无接触,无压力、无火花、迅速发出电气指令,准确反应出运动机构的位置和行程。即使用于一般的行程控制,其定位精度、操作频率、使用寿命、安装调整的方便性和对恶劣环境的适用能力,是一般机械式行程开关所不能相比的。它广泛地应用于机床、冶金、化工、轻纺和印刷等行业。在自动控制系统中可作为限位、计数、定位控制和自动保护环节等。
2、类型分为NPN和PNP
接近开关的接线线序:
三线式的接近开关有三根线头,棕、蓝、黑三色,棕、蓝接直流电源。接近开关通常接入24V直流电源。棕色线接+24V、蓝色接0V,黑色线为输出线。
NPN常开接近开关,当有金属物体靠近开关时,接近开关指示灯亮,黑色线与蓝色线导通,黑色线输出低电平,输出0V电压信号。
PNP常开接近开关,当有金属物体靠近开关时,接近开关指示灯亮,黑色线与棕色线导通,黑色线输出高电平,输出+24V电压信号。
总的来说:NPN输出低电平,PNP输出高电平。
NPN适合做低端驱动,即PN结在下面(低端),发射极E接地。
PNP适合做高端驱动,即PN结在上面(高端),发射极E接VCC。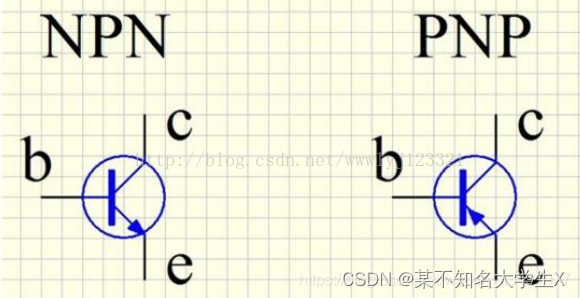
NPN与PNP的区别是参考:NPN和PNP的区别和总结-CSDN博客
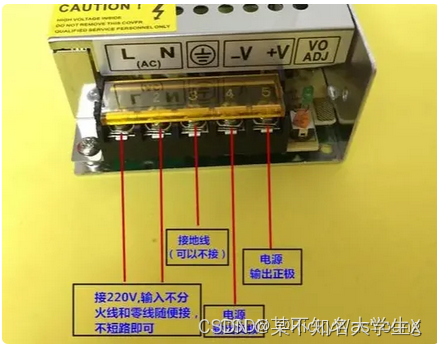
四、开关电源的介绍
概念:
开关电源的接线方法:
五、PLC与步进电机接线
分为共阳接法和共阴接法

驱动器与步进电机、PLC输出端的接线如下所示:
本次实验采用共阳接法,EN+、DIR+、PUL+接在电源的+24V(需要外接限流电阻)
- EN-可以悬空不接
- PUL-接PLC的输出端引脚Y0
- DIR-接PLC的输出端引脚Y1
- A+、A-、B+、B-分别接电机的A相和B相(确保正确接线,需要用万用表测一下A相和B相)
- 电源采用+24V开关电源

PLC的接线如下所示:
输入端:
X1 接 限位传感器的信号引脚
X2 接 限位传感器2的信号引脚
输出端:
采用共阳接法,PLC的输入公共端S/S 接 电源的+24V
PLC的输出公共端COM1 接 电源的0V
限位传感器(接近开关)接线:
三线式的接近开关有三根线头,棕、蓝、黑三色,棕、蓝接直流电源。接近开关通常接入24V直流电源。棕色线接+24V、蓝色接0V,黑色线为输出线。
传感器1、2的黑色输出线分别接三菱PLC输入端的 X1 X2 引脚
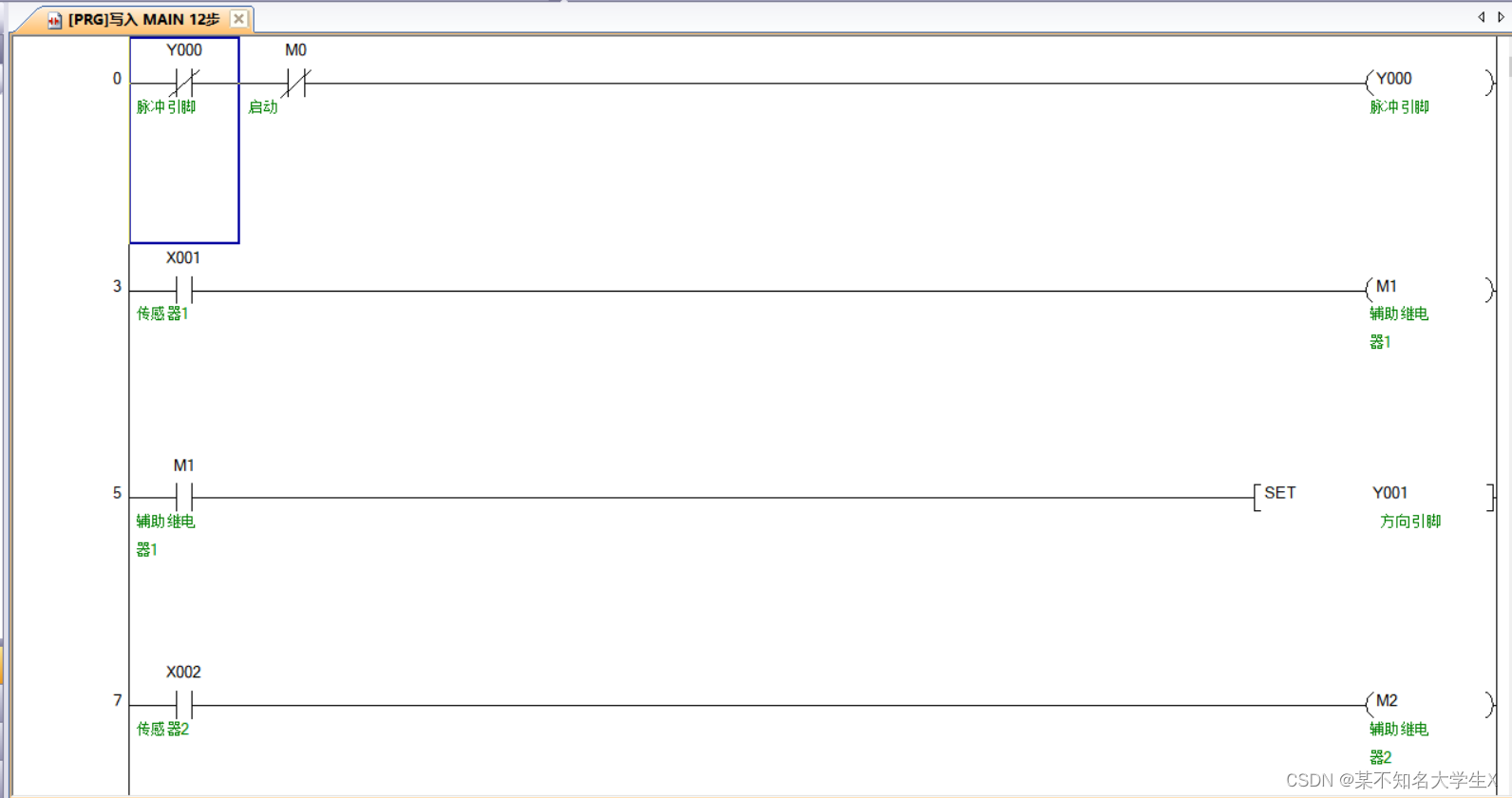
六、编写梯形图程序
其中Y0是脉冲输出引脚、Y1是方向引脚
X1为右传感器1的输出端
X2为左传感器2的输出端
M1、M2为辅助寄存器
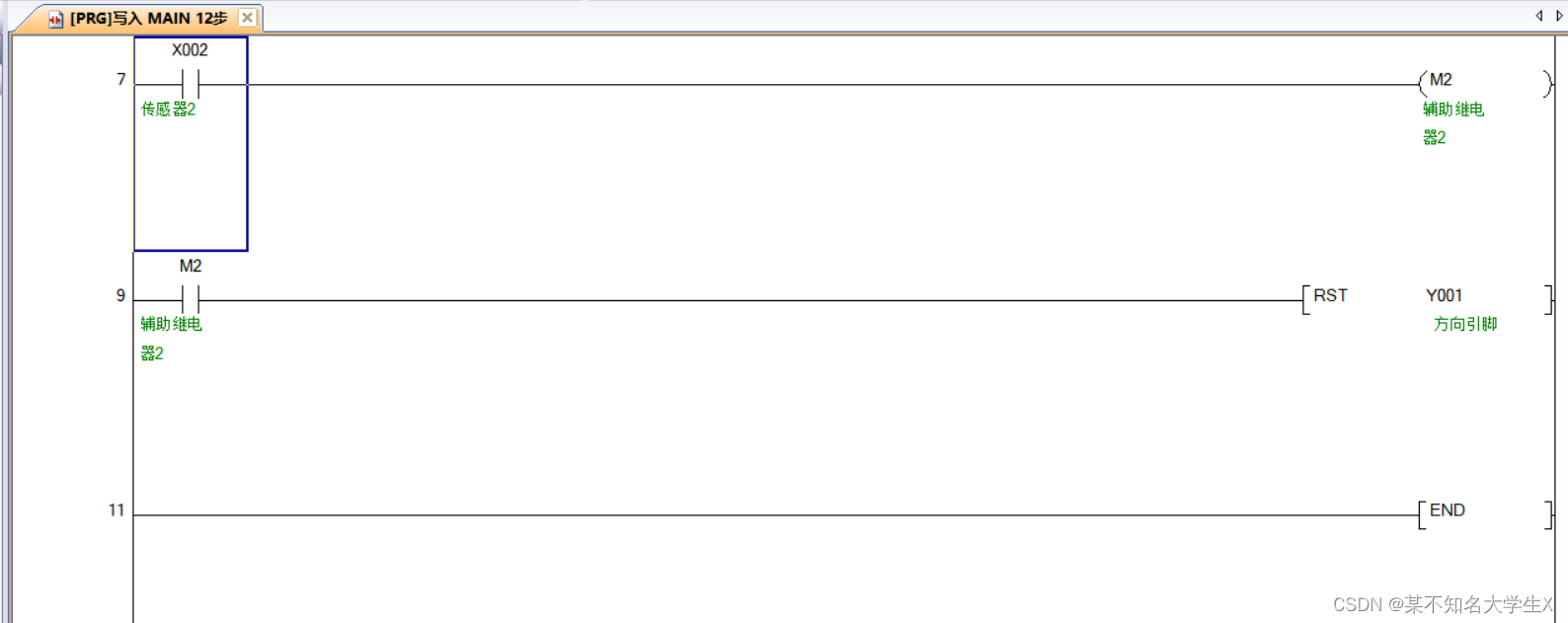
实验结果:
步进电机自动运动,当步进电机靠近右传感器,步进电机会向左方向运动;当步进电机靠近左传感器,步进电机会向右方向运动。

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









