






1.具体步骤
①多视角图像处理,②稀疏重建(VisualSFM),③稠密重建(CMVS),④点云模型化。
| 名称 | 原理 | 应用 |
| 稀疏重建 | 通过在至少两幅图像上提取匹配点对,计算相机运动参数,三角化重建得到物体的深度信息,同时生成点云 | 比较流行的是使用运动恢复结构法(SFM),对图像对进行特征点识别匹配等,来获得目标物的稀疏三维点云 |
| 稠密重建 | 从目标所在区域的成像属性出发,利用光度一致性约束,将稀疏特征点周围的一些区域恢复出三维信息。 | CMVS:即面片的重构,先根据特征点生成面片,然后对误差大的面片进行过滤(可视一致性)。 |
| 点云模型化 | 多是对点云三角化处理来生成网格模型。根据图像间匹配关系进行纹理映射,将纹理像素映射到网格模型像素中,来展现物体的表面细节。 | 点云模型分辨率不高,需要对三维点云进行网格化 |
2.meshlab具体步骤说明
泊松分布之前先要确定法向量(点云模型是离散的,分辨率不高)
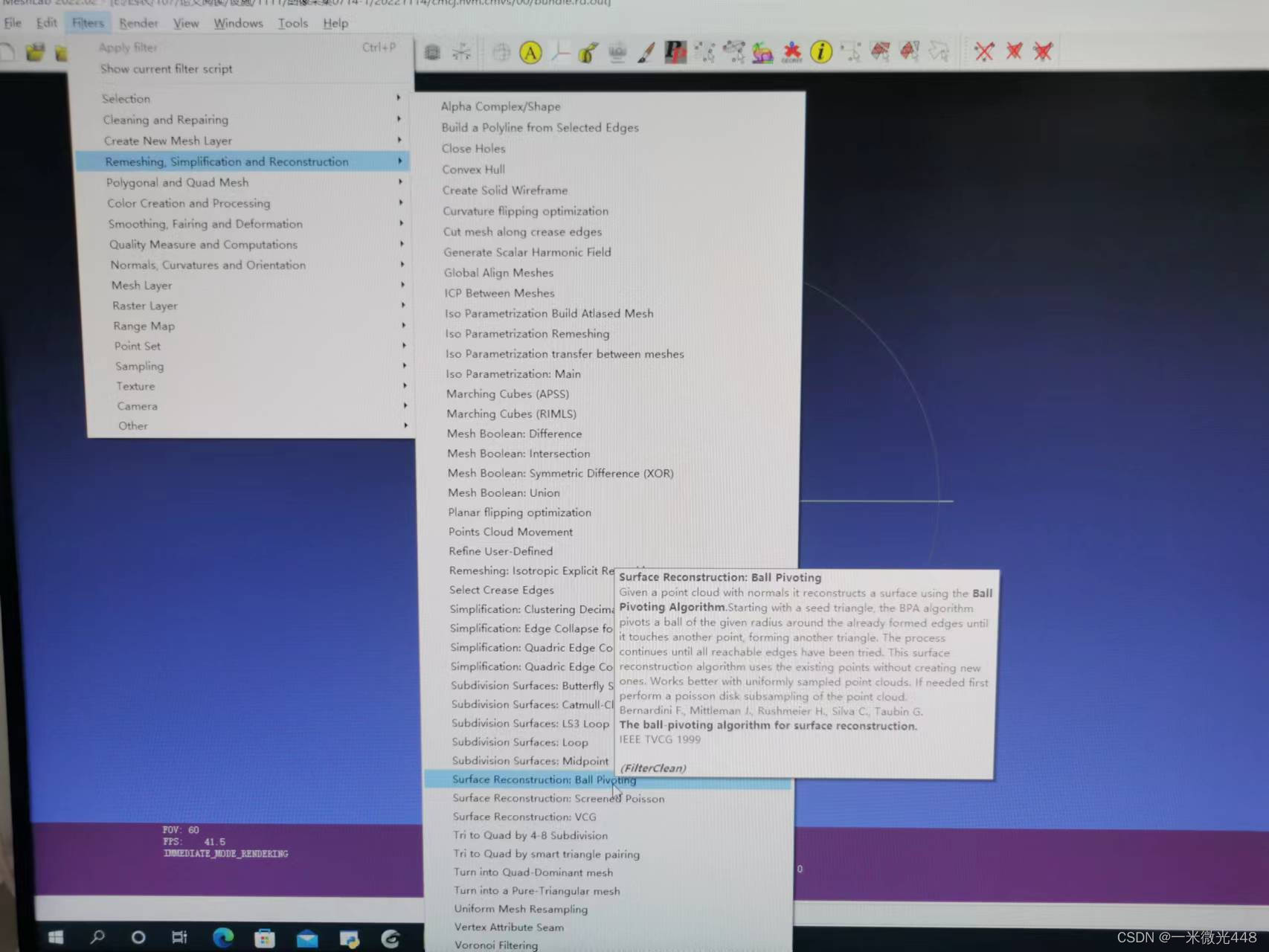
滚球算法的原理是首先在点云中随机寻找到一个种子三角形,然后滚球算法会在这个种子三角形边界内滚动一个预先给定直径的小球,当这个小球碰到三角形边界外的另外一个点时就组成另外一个三角形。滚球算法的收敛条件是当所有的边界都被滚动到且没有多余的点再组成三角形。
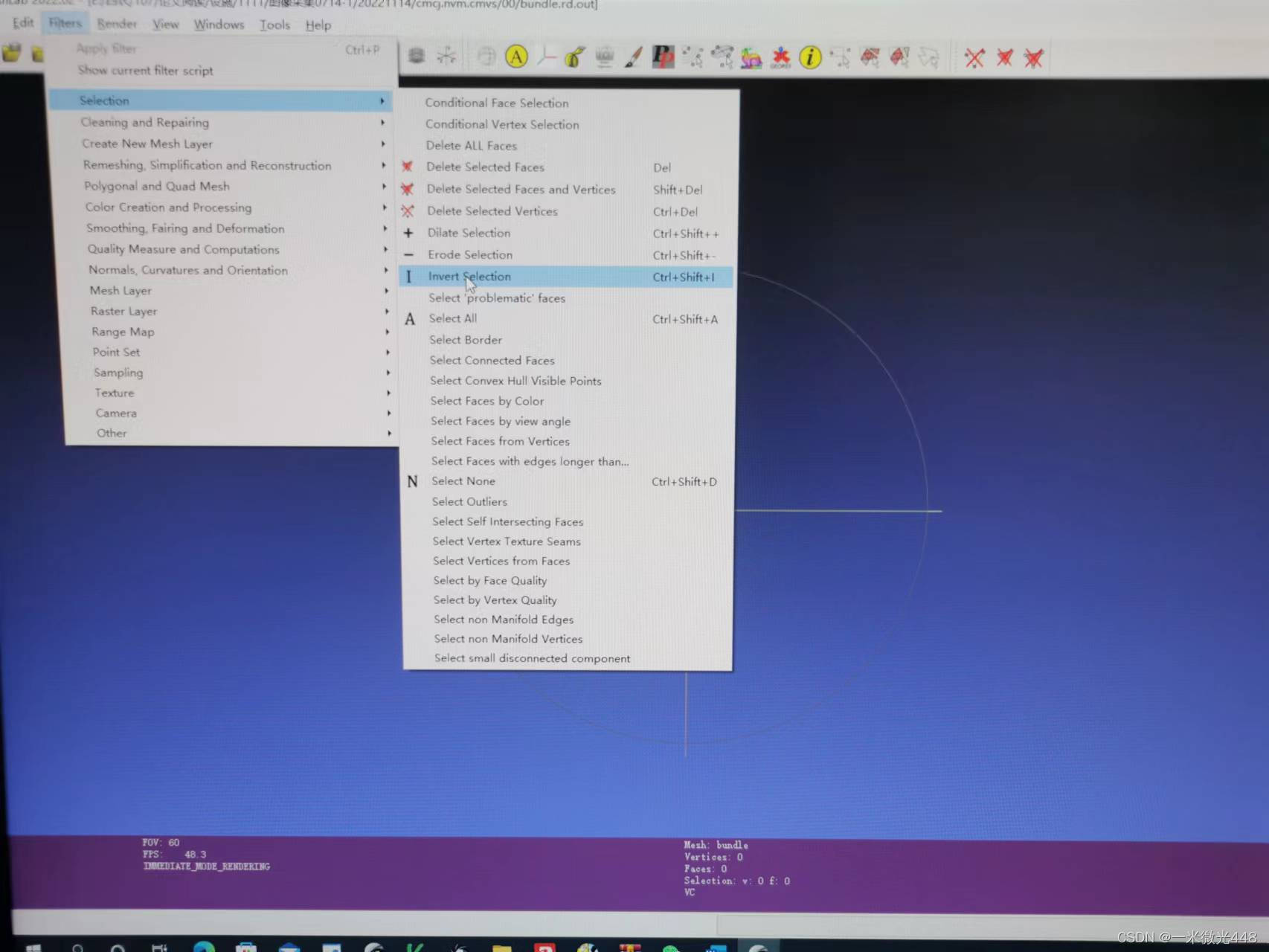
反向选择,主要用来删除一些不想要的点云(先选中需要保留的点云,然后反向选择,删除)
计算法向量

泊松重建(还有滚球法重建与三角重建)
生成材质文件
多视窗
填充孔洞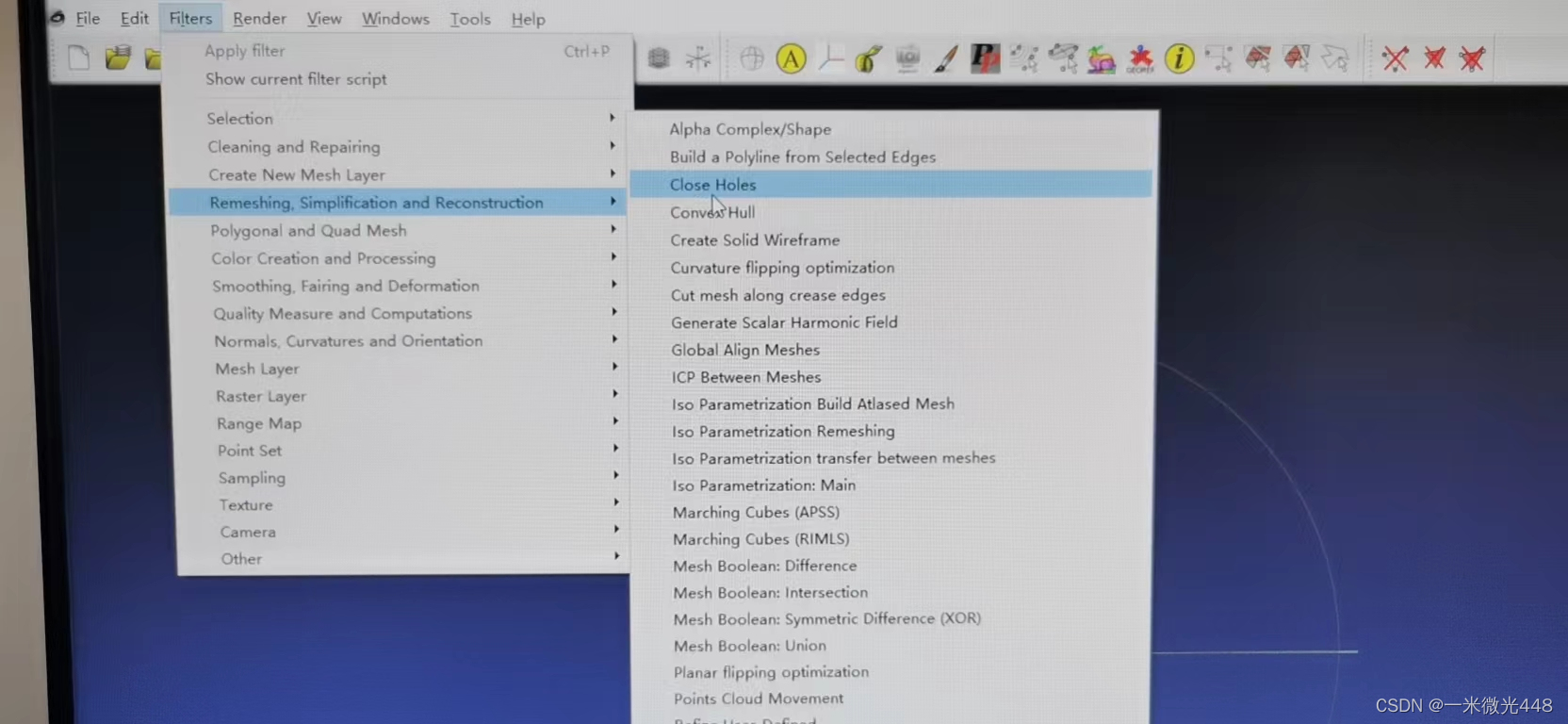















 295
295











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









