







 超级会员免费看
超级会员免费看

文档中的是base_footprint,需要根据自己所设的坐标系更改,我的改为base_link
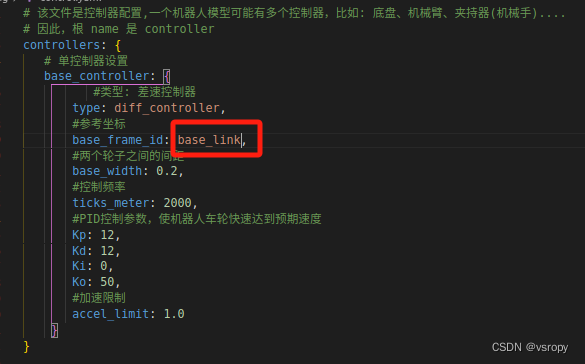
如何查看自己设的坐标系:

这些parent父坐标系就是
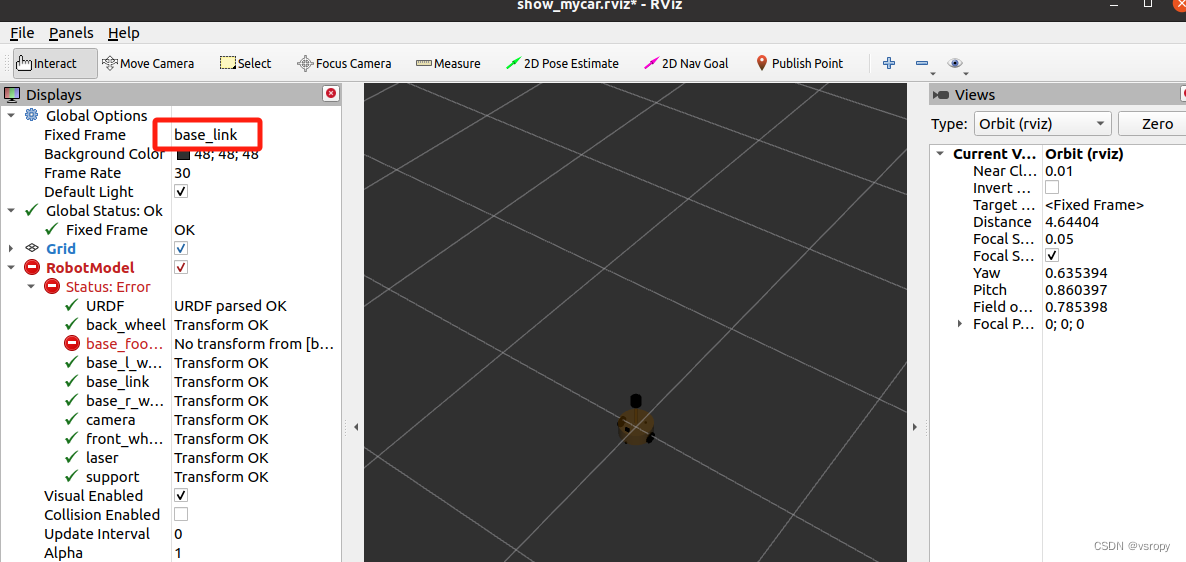
同时打开rviz后需要更改成base_link
文档中的是base_footprint,需要根据自己所设的坐标系更改,我的改为base_link
如何查看自己设的坐标系:
这些parent父坐标系就是
同时打开rviz后需要更改成base_link
 2612
2612











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























